Dispositivo Escáner de Contorno de objetos.
1. Dispositivo escáner de contorno de objetos caracterizado porque está constituido por una estructura soporte sobre el cual se dispone un elemento móvil de haz de luz que mediante un elemento de lente convergente colimada hace que los rayos del haz pasen a ser paralelos proyectando una línea sobre el objeto escaneado y mediante un elemento de recepción móvil el cual recibe la línea del contorno se recoge a través de una cámara para su procesamiento informático en el hardware del dispositivo conectado a un ordenador.
2. Dispositivo escáner de contorno de objetos según la reivindicación 1 en el cual el haz de luz es un dispositivo laser que emite la línea y que mediante la lente convergente colimada pasa a ser una luz láser paralelo.
3. Dispositivo escáner de contorno de objetos según reivindicaciones anteriores, caracterizado porque dispone de un elemento reflectante móvil que barre todo la longitud del soporte donde se sitúa el objeto a escanear y de un elemento de recepción móvil solidario al anterior que recibe la línea del contorno que se recoge a través de una cámara para su procesamiento informático en el hardware del dispositivo conectado a un ordenador.
4. Dispositivo escáner de contorno de objetos según las reivindicaciones anteriores que comprende la utilización de una cámara que lee el patrón superficial proyectado en la parte superior del objeto.
5. Dispositivo escáner de contorno de objetos según las reivindicaciones anteriores, que comprende la utilización de una pantalla situado en el lateral de la estructura soporte donde se muestra información del proceso del escáner.
6. Dispositivo escáner de contorno de objetos según las reivindicaciones anteriores, que comprende un compartimento cerrado al que se tiene acceso mediante una puerta frontal que consta de dispositivos de seguridad que detectan su apertura y que apagarían el láser y detendrían todos los movimientos internos.
Tipo: Modelo de Utilidad. Resumen de patente/invención. Número de Solicitud: U201430512.
Solicitante: TORRMAN SPAIN.
Nacionalidad solicitante: España.
Inventor/es: TORRADO RUIZ,Francisco Jose.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01B11/24 FISICA. › G01 METROLOGIA; ENSAYOS. › G01B MEDIDA DE LA LONGITUD, ESPESOR O DIMENSIONES LINEALES ANALOGAS; MEDIDA DE ANGULOS; MEDIDA DE AREAS; MEDIDA DE IRREGULARIDADES DE SUPERFICIES O CONTORNOS. › G01B 11/00 Disposiciones de medida caracterizadas por la utilización de medios ópticos (instrumentos de los tipos cubiertos por el grupo G01B 9/00 en sí G01B 9/00). › para la medida de contornos o curvaturas.
- G01B11/25 G01B 11/00 […] › mediante la proyección de un patrón, p. ej.franjas de Moiré, sobre el objeto (G01B 11/255 tiene prioridad).
- G06T17/00 G […] › G06 CALCULO; CONTEO. › G06T TRATAMIENTO O GENERACIÓN DE DATOS DE IMAGEN, EN GENERAL. › modelado 3D mediante gráficos de computdor.
- G06T7/00 G06T […] › Análisis de imagen.
Fragmento de la descripción:
Dispositivo escáner de contorno de objetos
Objeto de la Invención
El dispositivo escáner de contorno de objetos de la presente invención hace referencia a un objeto un escáner de haz de luz que por sus características, conformación y funcionamiento dan solución a determinados problemas en el estado de la técnica y los artículos similares que puedan existir en mercado.
En concreto, esta innovación se refiere a unos dispositivos que permite obtener el contorno exacto de un objeto así como sus dimensiones. Las funciones de escaneado, ingeniería inversa, catalogada de productos así como empaquetado de objetos mediante conformados de espuma plástica.
Antecedentes de la invención
Todos los procesos actuales de escaneado de objetos están pensados para realizar una ingeniería inversa o recreación virtual de un objeto real. Los procesos de escaneados generan una gran cantidad de datos que es necesario procesar; primero se obtiene una nube de puntos, luego pasamos a una malla y posteriormente limpiamos la superficie. Este tipo de escaneado genera entre los datos multitud de agujeros, que es como se denomina a la la falta de datos, por no tener acceso a determinadas parte del objeto escaneado.
Así mismo, dado que se utilizan cámaras con lentes de pequeño tamaño que leen esos datos, por los propios principios de la óptica es imposible ver en todo momento los laterales de los objetos cuando superan el tamaño de la lente utilizada.
Además, siempre se piensa con estos escáneres en obtener toda la superficie completa con lo cual obtenemos un exceso de información.
La situación que nos atañe es que estos escáneres no son eficientes por la gran cantidad de datos y edición posterior que haría falta, cuando lo que realmente nos interesa saber del objeto que escaneamos es su contorno (y superficie), y sus principales cotas de ancho, largo y alto. Esto nos ha supuesto desarrollar tanto un escáner, como un software que durante el proceso de escaneado sólo toma los datos necesarios y descarta automáticamente todo lo demás.
Como cualquier sistema óptico aplicado a visión artificial e industria seguimos teniendo el problema de la pérdida de información por la relación entre las lentes utilizadas y el tamaño de los objetos. Esto se ha solucionado desarrollando una lente que nos permiten colimar los rayos de luz.
El software que acompaña al escáner permite no sólo controlar el dispositivo periférico (escáner) sino que, además, es un completo sistema de diseño CAD que permite el envío de los escaneados de forma telemática a otros usuarios y empresas que pueden prestar nuevos servicios gracias a esta herramienta.
La obtención rápida de los contornos puede aplicarse a multitud de aplicaciones donde se necesite el reconocimiento del contorno del objeto.
Una tendencia común es llenado del contenedor en exceso, resultando que puede que se haya colocado en el contenedor más material de relleno del que se necesita para proteger adecuadamente el objeto u objetos empacados en el paquete.
En otros casos, el operador puede poner muy poco material de relleno en el paquete trayendo como consecuencia que el objeto u objetos colocados en el contenedor pueda dañarse durante su traslado. El exceso o defecto en la cantidad de abarrote se convierte usualmente en un problema mayor a medida que aumenta la velocidad de los embalajes. Hoy en día existen dispensadores de relleno de vacío, en particular los procesadores de papel para relleno, que pueden producir una cadena ininterrumpida de material a un ritmo que sobrepasa los 50 pies por minuto (alrededor de 0,25 m por segundo) además no puede ser reutilizado posteriormente como embalaje para piezas en la organización de herramientas para procesos.
Una solución elemental para el problema anteriormente expuesto se plantea en la Patente Norteamericana No. 5.871.429. La patente '429 muestra un sistema de empacado que consta de una sonda para detectar los espacios vacíos en un contenedor y un procesador de relleno que consta de un controlador para controlar la alimentación y cortar el flujo de material de relleno de manera que se produzca la cantidad de material de relleno necesaria para rellenar el espacio vacío en el paquete. Como se menciona en la patente '429, se puede usar una sonda mecánica para sondear el paquete en una o varias zonas para determinar la cantidad de material de relleno necesaria para llenar el vacío. La sonda mecánica también se puede usar junto con un lector de código de barras o puede usarse junto con sensores o ser suplantada por estos, los cuales detecten las dimensiones o grado de relleno del contenedor, incluyendo sensores ópticos y ultrasónicos.
Aunque el sistema de la patente '429 descrito anteriormente representa un avance significativo en la técnica, existe aún la necesidad de dispositivos mejorados y de métodos para ¡mplementar la solución básica que se propone en la patente '429.
Descripción de las figuras
Una realización no limitativa de la invención va a ser descrita ahora a título de ejemplo únicamente, con referencia a las Figuras que siguen, en las que:
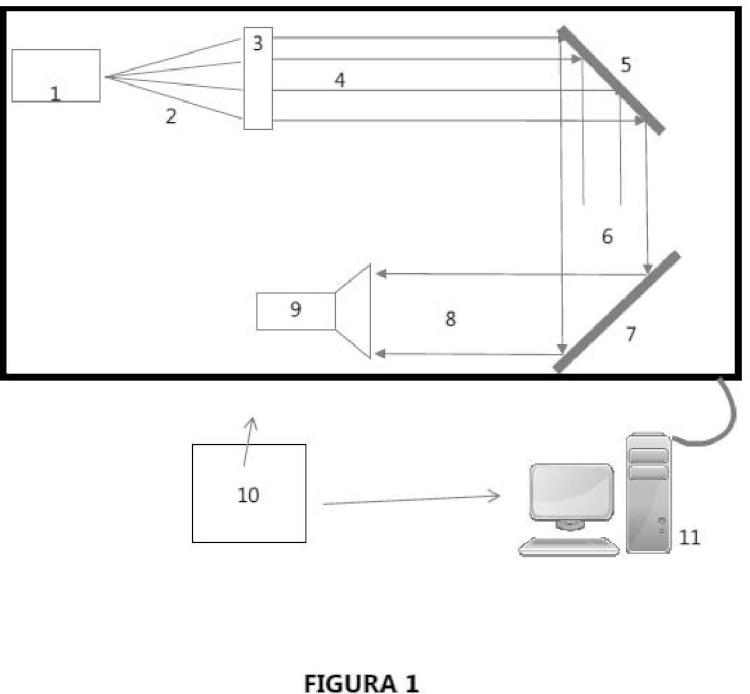
La Figura 1 muestra un sistema de realización de la presente invención con la distribución de los componentes y dispositivos que componen el escáner de contorno.
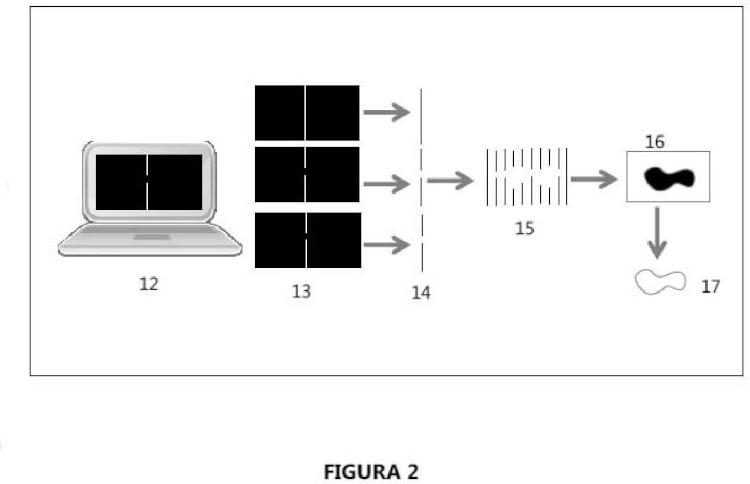
la Figura 2 es una ilustración de un diagrama de una realización de Procesamiento de información de datos por parte del software
Explicación de la invención
El dispositivo de la invención presente se refiere a un escáner montado sobre un soporte que a su vez es donde se aloja el objeto a escanear.
El dispositivo dispone de un elemento que genera en primer lugar un haz de luz (1) de tipo línea (2) que se hace pasar por una lente convergente colimadora (3) de manera que esos rayos, que ¡nidalmente viajaban con un cierto ángulo de desviación, ahora son todos paralelos (4).
Dichos rayos colimados se hacen pasar por un juego de elementos de reflexión(5) planos que los proyectan perpendicularmente al objeto escaneado (6). Dichos rayos mediante dispositivos es desplazado linealmente realizando un barrido completo del objeto a escanear.
En la presente realización el haz de luz es un láser de tipo línea que ¡nidalmente sale con un ángulo definido estos rayos pasan a ser rayos paralelos mediante la lente convergente colimada.
En la presente realización el elemento reflexión se dispone sobre un soporte que se desliza linealmente y es movido mediante correa dentada controlada por el hardware del escáner. El desplazamiento del elemento de reflexión cumple con el propósito de barrer todo el objeto a escanear.
En la presente realización el elemento de reflexión esta realizado mediante un espejo plano que ocupa todo el acho a barrer por el objeto.
En otras realizaciones este elemento de reflexión esta realizado mediante un elemento metálico pulido que realiza la función de modificar la dirección de las líneas de haz pasando de ser horizontales a verticales
En el lado opuesto del objeto escaneado disponemos un elemento receptor (7) que reciben las líneas discontinuas proyectadas del haz de luz que son la resultante de dejar pasar los rayos allí donde no hay objeto (8). El elemento receptor se desplaza solidariamente con el elemento de reflexión para que en todo momento el haz de luz incida de la misma forma.
En la presente realización el elemento receptor se dispone en ángulo de 45° sobre la recepción de líneas verticales de haz de luz, la superficie del elemento es opaca de color blanco con el fin de visualizarse más claramente la incidencia en la superficie del haz de luz.
Tras pasar por el elemento receptor, las líneas son captadas por una cámara (9) en todo momento grabando la secuencia de líneas. Esta cámara está situada frente al elemento de reflexión y se desplaza solidariamente con elemento receptor para obtener secuencia total del barrido.
Dicha secuencia de líneas captadas mediante procesamiento informático (10) es convertida en una imagen plana, el resultado es una imagen bicolor, que muestra perfectamente el contorno de la pieza sin deformaciones de ningún tipo.
Posteriormente, otro proceso informático (11) convierte esa imagen plana en formato vectorial que puede ser procesada por cualquier aplicación de diseño.
A su vez el dispositivo consta (según el modelo) de varias cámaras adicionales, una que permite tomar una foto en color del objeto para su posterior identificación y clasificación.
Una cámara adicional lee el patrón superficial proyectado en la parte superior del objeto, y mediante el procesado informático solo se toma la mayor cota de cada línea con el fin de establecer...
Reivindicaciones:
1. Dispositivo escáner de contorno de objetos caracterizado porque está constituido por una estructura soporte sobre el cual se dispone un elemento móvil de haz de luz que mediante un elemento de lente convergente colimada hace que los rayos del haz pasen a ser paralelos proyectando una línea sobre el objeto escaneado y mediante un elemento de recepción móvil el cual recibe la línea del contorno se recoge a través de una cámara para su procesamiento informático en el hardware del dispositivo conectado a un ordenador.
2. Dispositivo escáner de contorno de objetos según la reivindicación 1 en el cual el haz de luz es un dispositivo laser que emite la línea y que mediante la lente convergente colimada pasa a ser una luz láser paralelo.
3. Dispositivo escáner de contorno de objetos según reivindicaciones anteriores, caracterizado porque dispone de un elemento reflectante móvil que barre todo la longitud del soporte donde se sitúa el objeto a escanear y de un elemento de recepción móvil solidario al anterior que recibe la línea del contorno que se recoge a través de una cámara para su procesamiento informático en el hardware del dispositivo conectado a un ordenador.
4. Dispositivo escáner de contorno de objetos según las reivindicaciones anteriores que comprende la utilización de una cámara que lee el patrón superficial proyectado en la parte superior del objeto.
5. Dispositivo escáner de contorno de objetos según las reivindicaciones anteriores, que comprende la utilización de una pantalla situado en el lateral de la estructura soporte donde se muestra información del proceso del escáner.
6. Dispositivo escáner de contorno de objetos según las reivindicaciones anteriores, que comprende un compartimento cerrado al que se tiene acceso mediante una puerta frontal que consta de dispositivos de seguridad que detectan su apertura y que apagarían el láser y detendrían todos los movimientos internos.
Patentes similares o relacionadas:
Transferencia con control de contorno, del 29 de Julio de 2020, de JUNGHEINRICH AKTIENGESELLSCHAFT: Disposición para el control de contorno de palés que deben almacenarse en un sistema de estanterías, que comprende: una estación de transferencia […]
Dispositivo y procedimiento para medir la forma de una porción de pared de un horno de coque, del 15 de Julio de 2020, de Centre de Pyrolyse du Charbon de Marienau: Un dispositivo para medir una forma de una porción de pared de un horno de coque , comprendiendo el dispositivo : - una caja […]
Dispositivo y método para medir la rectitud de una pieza de trabajo en forma de varilla, del 15 de Julio de 2020, de MSG Maschinenbau GmbH: Dispositivo para medir la rectitud de una pieza de trabajo en forma de varilla con un soporte para la pieza de trabajo en forma de varilla y un aparato para detectar […]
DISPOSITIVO DE MEDICIÓN DE COTAS GEOMÉTRICAS, del 2 de Julio de 2020, de EMPRESA DE TRASPORTE MASIVO DEL VALLE DE ABURRA LTDA. - METRO DE MEDELLIN LTDA: La presente invención se refiere a dispositivos y métodos de medición de cotas geométricas en cables de un teleférico para verificar que el desplazamiento del cable […]
Dispositivo de control tridimensional sin contacto de una pieza hueca con superficie interna de revolución y procedimiento correspondiente, del 1 de Abril de 2020, de DWFritz Automation, Inc: Dispositivo de control tridimensional sin contacto de una pieza hueca con superficie interna de revolución, denominada pieza hueca que va a controlarse, comprendiendo […]
Método y sistema para inspeccionar una pieza de trabajo, del 18 de Marzo de 2020, de THE BOEING COMPANY: Un método para inspeccionar una pieza de trabajo , comprendiendo dicho método: la introducción de datos del modelo asociado con la pieza de trabajo […]
Equipo y procedimiento para la fabricación de piezas de prótesis dental, del 18 de Marzo de 2020, de INSTITUT STRAUMANN AG: Equipos de captación de superficies y equipos de generación de superficies, con equipos para la detección parcial o totalmente automática de bordes de preparaciones […]
Sistema con integración de interfaz de usuario 3D, del 5 de Febrero de 2020, de 3SHAPE A/S: Un sistema que comprende: -por lo menos un visualizador , donde el por lo menos un visualizador está adaptado para representar visualmente una […]