Dispositivo endoscópico magnético.
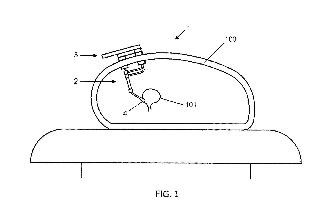
Dispositivo endoscópico magnético (1) formado por una porción interna (2) dotada de un instrumento quirúrgico (4),
que una vez se encuentra en el interior de una cavidad del paciente (100) permite manejar dicho instrumento (4) a un cirujano y coger, cortar, etc. un órgano interno (101), y una porción externa (3) que se encuentra en el exterior de dicha cavidad. La porción interna (2) se maneja desde el exterior por medio de la porción externa (3) gracias a un conjunto de pares de imanes que mantienen ambas porciones (2, 3) magnéticamente conectadas, no requiriendo por tanto de un puerto de entrada para su funcionamiento. El dispositivo (1) permite manejar, a una persona o robot, diferentes tipos de instrumento quirúrgico (4) desde el exterior del paciente (100) y obtener diferentes ángulos de acceso a la región de interés (triangulación).
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201201209.
Solicitante: UNIVERSIDAD DE MALAGA.
Nacionalidad solicitante: España.
Inventor/es: MUÑOZ MARTINEZ,VICTOR FERNANDO, GOMEZ DE GABRIEL,JESUS, HARWIN,William.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A61B19/00
Fragmento de la descripción:
DISPOSITIVO ENDOSCÓPICO MAGNÉTICO
OBJETO DE LA INVENCiÓN
La presente invención se enmarca de manera general en el campo de la medicina, y más concretamente en el campo de la cirugía.
El objeto principal de la invención es un nuevo tipo de dispositivo endoscópico dotado de un instrumento quirúrgico que, una vez introducido en una cavidad del paciente, no requiere de un puerto de entrada para su funcionamiento, ya que se gobierna desde el exterior mediante un soporte dotado de un conjunto de imanes.
ANTECEDENTES DE LA INVENCiÓN
En el campo de la cirugía es de extrema importancia minimizar la cantidad y tamaño de las incisiones que se practican para una operación determinada, ya que ello redunda en un menor tiempo de hospitalización y en menores molestias para el paciente. La cirugía endoscópica permite realizar operaciones a través de orificios muy pequeños, a través de los cuales se introduce una pequeña cámara y todos el instrumental quirúrgico necesario para la operación. Por ejemplo, se pueden mencionar las técnicas conocidas SILS (Single Incision Laparoscopic Surger y ) , donde se emplea un único orificio o puerto de acceso, y NOTES (Natural Orifice Translumenal Endoscopic Surger y ) , que emplean orificios naturales del cuerpo.
Sin embargo, en ocasiones no es fácil llegar hasta todos los lugares que requiere una operación a través de una sola incisión, motivo por el cual es necesario practicar varias incisiones, o bien una incisión más amplia. Para resolver este problema, en la actualidad existen algunos dispositivos que utilizan las propiedades de los imanes con el objeto de permitir movimientos más amplios de los instrumentos en el interior de la cavidad del paciente donde se está realizando la operación.
Un documento conocido es la solicitud de patente US2009/0043246, que está basada en unas pinzas de tipo cocodrilo unidas a un imán mediante un cable, y que se abren y posicionan con la ayuda de una pinza laparoscópica. Un imán en el exterior del paciente permite controlar la dirección y la tensión con la que se sujetan los tejidos. Sin embargo, este dispositivo no permite su apertura o cierre desde el exterior sin el uso de un puerto, ni ejerce esfuerzos en otras direcciones, por lo que posee una utilidad limitada en comparación con la invención propuesta.
También es conocido un sistema denominado MAGS (Magnetic Anchoring and Guidance System) , compuesto por diferentes dispositivos quirúrgicos para cirugía SILS. Se puede citar como ejemplo de esta técnica la solicitud de patente US2003/0114731A1, que está basada en el uso de imanes para el posicionamiento y orientación de dispositivos quirúrgicos. Se utilizan uno o dos imanes por dispositivo para controlar la posición y orientación de una cámara o un separador. En uno de ellos, la variación de la distancia de los imanes externos permite cambiar la inclinación del instrumento, pero no se utilizan los imanes para accionar el extremo del instrumento (apertura o cierre de pinzas o tijeras) , ni se prevé, por tanto, un sistema de manejo desde el exterior que permita su control con una sola mano o mediante un robot.
El sistema descrito en la solicitud de patente US 2009/0005636A 1 consiste en un sistema de sujeción y guiado de instrumentos quirúrgicos activos cámara y pinza que son posicionados mediante un imán y que se accionan por medio de una conexión eléctrica.
Por último, el documento W02010/083480A2 propone el uso de una
plataforma insertable dentro del paciente que se sujeta magnéticamente, pero dotada de cámaras y pinzas activas alimentadas por baterías o bien por unas conexiones percutáneas.
DESCRIPCiÓN DE LA INVENCiÓN
Los inventores de la presente solicitud han desarrollado un dispositivo endoscópico magnético que permite al cirujano manejar desde el exterior del paciente un instrumento quirúrgico dispuesto en el interior de una cavidad del paciente. El dispositivo propuesto, en comparación con los sistemas conocidos de manejo de instrumentos quirúrgicos de forma magnética, permite posicionar, orientar y activar el instrumento. Además, se pueden obtener diferentes ángulos de acceso a la región de interés (triangulación) , y pueden manejarse diferentes instrumentos por diferentes personas o robots.
Otra ventaja principal de la invención es que el dispositivo propuesto es totalmente pasivo, por lo que no requiere un suministro externo de energía o de baterías, ni tampoco la transmisión del movimiento a través del orificio practicado en el paciente.
También se evita la necesidad de realizar punciones percutáneas, que son un método invasivo, constituyendo un sistema más directo e intuitivo de uso sencillo, bajo coste, reutilizable y fácilmente esterilizable.
Un primer aspecto de la invención está dirigido de forma general al dispositivo endoscópico magnético de la invención, que comprende dos partes: una porción interna de actuación en el interior del paciente y una porción externa de control conectable magnéticamente a dicha porción interna. La porción interna es conectable mecánicamente a un instrumento quirúrgico, y comprende al menos dos imanes de accionamiento de dicho instrumento quirúrgico que son conectables magnéticamente a unos correspondientes al menos dos imanes de control de la porción externa. De este modo, la variación de las posiciones relativas de los imanes de control situados en el exterior del paciente permiten el manejo del instrumento quirúrgico situado en el interior del paciente. Nótese que el dispositivo de la invención puede incluir un número virtualmente ilimitado de pares de imanes para desplazar, orientar y accionar con diferentes grados de libertad y de manera simultánea uno o varios instrumentos quirúrgicos.
En este contexto, se entiende que la expresión "conectable magnéticamente" hace referencia a que cada pareja formada por imán de accionamiento e imán de control está configurada para su conexión magnética a través de la pared abdominal del paciente, es decir, los imanes de la pareja se atraen y la fuerza de atracción es suficiente para conseguir la conexión teniendo en cuenta el espesor de dicha pared. A su vez, la expresión "conectable mecánicamente" hace referencia a que el instrumento quirúrgico puede acoplarse o fijarse a la porción interna. Así, el instrumento quirúrgico podría ser intercambiable, acoplándose a rosca o similar, disponiéndose de un kit de instrumentos (pinzas, bisturí, etc.) compatibles que podrían utilizarse según cada aplicación particular.
Así, una vez el dispositivo está operativo, el cirujano sólo tiene que modificar adecuadamente las orientaciones y/o las posiciones relativas de los imanes de control para manejar el instrumento quirúrgico situado en el interior de la cavidad del paciente, pudiendo no sólo accionar el instrumento, como por ejemplo abrir o cerrar unas pinzas o unas tijeras, sino también hacerlo girar o incluso desplazarlo de posición. Todo esto se consigue sin necesidad de mantener una conexión mecánica entre la porción interior y exterior, y también sin baterías o cables.
Los instrumentos quirúrgicos pueden ser en principio de cualquier tipo, incluyendo tijeras, pinzas, fórceps, bisturís, etc., estando configuradas en cada caso las posiciones de los imanes en función del funcionamiento de cada instrumento concreto. En adelante, se describirá concretamente un dispositivo diseñado para el manejo de un instrumento quirúrgico de tipo pinza o tijeras, que está dotado de dos brazos configurados para abrirse y cerrarse en el interior del paciente.
Para el manejo de un instrumento quirúrgico de tipo pinza o tijeras, el número mínimo de pares de imanes de accionamiento sería de dos, uno para cada uno de los brazos. Sin embargo, en caso de utilizar sólo dos pares de imanes quedaría sin control el punto central correspondiente al eje del instrumento alrededor del cual giran los brazos, pudiendo producirse giros indeseables o incontrolados del instrumento en el interior del paciente. Por ello, una configuración especialmente preferida de la invención comprende tres pares de imanes:
-un primer imán de accionamiento conectado mecánicamente a un primer brazo del instrumento quirúrgico y conectable magnéticamente a un primer imán de control.
-un segundo imán de accionamiento conectado mecánicamente a un segundo brazo del instrumento quirúrgico y conectable magnéticamente a un segundo imán de control.
-un imán central de accionamiento conectado mecánicamente al primer brazo del instrumento quirúrgico y conectable magnéticamente a un imán central de control.
De ese modo, al acercar o alejar entre sí el primer imán de control...
Reivindicaciones:
1. Dispositivo (1) endoscópico magnético que comprende una porción interna (2) de actuación en el interior de un paciente (100) y una porción externa (3) de control conectable magnéticamente a dicha porción interna (2) , caracterizado porque la porción interna (2) es conectable mecánicamente a un instrumento (4) quirúrgico y comprende al menos dos imanes de accionamiento (5a, 6a, 7a) de dicho instrumento (4) quirúrgico conectables magnéticamente a unos correspondientes al menos dos imanes de control (5b, 6b, 7b) de la porción externa (3) , de tal modo que la variación en la orientación y/o las posiciones relativas de los imanes de control (5b, 6b, 7b) en el exterior del paciente permiten el manejo del instrumento (4) quirúrgico en el interior del paciente (100) .
2. Dispositivo (1) endoscópico magnético de acuerdo con la reivindicación 1, que comprende:
un primer imán (5a) de accionamiento conectado mecánicamente a un primer brazo (41) del instrumento (4) quirúrgico y conectable magnéticamente a un primer imán (5b) de control;
un segundo imán (6a) de accionamiento conectado mecánicamente a un segundo brazo (42) del instrumento (4) quirúrgico y conectable magnéticamente a un segundo imán (6b) de control; y
un imán central (7a) de accionamiento conectado mecánicamente al primer brazo (41) del instrumento (4) quirúrgico y conectable magnéticamente a un imán central (7b) de control, de tal modo que al acercar o alejar entre sí el primer imán (5b) de control y el segundo imán (6b) de control en el exterior del paciente, se provoca el acercamiento o alejamiento entre sí del primer imán (5a) de accionamiento y el segundo imán (6a) de accionamiento en el interior del paciente, lo que a su vez provoca el cierre o apertura del instrumento (4) quirúrgico.
3. Dispositivo (1) endoscópico magnético de acuerdo con la reivindicación 2, donde la porción interna (2) comprende: un eje interno (8) de cuyo extremo distal sobresale el primer brazo (41) del instrumento (4) quirúrgico y de cuyo extremo proximal sobresale un primer brazo (10a) de accionamiento, estando fijado el imán central (7a) de accionamiento a dicho extremo proximal del eje interno (8) y el primer imán (5a) de accionamiento a un extremo libre del primer brazo (10a) de accionamiento; y
un eje externo (9) hueco que aloja en su interior el eje interno (8) de manera giratoria, de cuyo extremo distal sobresale el segundo brazo (42) del instrumento (4) quirúrgico y de cuyo extremo proximal sobresale un segundo brazo (10b) de accionamiento a cuyo extremo libre está fijado el segundo imán (6a) de accionamiento.
4. Dispositivo (1) endoscópico magnético de acuerdo con la reivindicación 3, donde los brazos (10a, 10b) de accionamiento forman esencialmente un ángulo recto con relación a los ejes interno (8) y externo (9) de la porción interior (2) .
5. Dispositivo (1) endoscópico magnético de acuerdo con cualquiera de las reivindicaciones 3-4, donde los brazos de accionamiento (10a, 10b) tienen longitudes (L1, L2) diferentes para permitir la alineación de los imanes de accionamiento (5a, 6a) con el imán central de accionamiento (7a) con el objeto de facilitar la introducción de la porción interior (2) en el interior de la cavidad del paciente.
6. Dispositivo (1) endoscópico magnético de acuerdo con cualquiera de las reivindicaciones 3-5, donde los brazos (41, 42) del instrumento (4) quirúrgico forman un ángulo obtuso con los ejes interno (8) y externo (9) de la porción interior (2) .
7. Dispositivo (1) endoscópico magnético de acuerdo con cualquiera de las reivindicaciones 3-6, donde los extremos de los brazos (41, 42) del instrumento (4) quirúrgico tienen una forma redondeada para evitar dañar al paciente al introducir la porción interior (2) en el interior del paciente.
8. Dispositivo (1) endoscópico magnético de acuerdo con cualquiera de las reivindicaciones 3-7, donde la distancia entre los primero y segundo imanes de accionamiento (5a, 6a) y los ejes interno (8) y externo (9) es mayor que la distancia entre los extremos de los brazos (41, 42) del instrumento quirúrgico (4) y los ejes interno (8) y externo (9) .
9. Dispositivo (1) endoscópico magnético de acuerdo con cualquiera de las reivindicaciones 2-8, donde la porción externa (3) toma la forma de un mango que comprende:
una primera pieza de agarre (11) que tiene un extremo distal donde está fijado el primer imán (5b) de control; y
una segunda pieza de agarre (12) que tiene un extremo distal donde está fijado el segundo imán (6b) de control, estando ambas piezas de agarre (11, 12) conectadas de manera pivotante por medio de un eje situado en un extremo proximal de las mismas, estando también el imán central (7b) de control fijado a dicho extremo proximal.
10. Dispositivo (1) endoscópico magnético de acuerdo con la reivindicación 9, donde la primera pieza de agarre (11) tiene un orificio (13) alargado conformado para recibir los dedos índice a anular de un usuario, y la segunda pieza de agarre (12) tiene un orificio circular (14) conformado para recibir el dedo pulgar del usuario.
11. Dispositivo (1) endoscópico magnético de acuerdo con cualquiera de las reivindicaciones 2-10, donde el primer imán (5a) de accionamiento tier¡e la misma polaridad que el segundo imán (6a) de accionamiento.
12. Dispositivo (1) endoscópico magnético de acuerdo con cualquiera de las reivindicaciones anteriores, donde los imanes (5a, 5b, 6a, 6b, 7a, 7b) tienen una forma redondeada para evitar causar daños en las paredes de la cavidad del paciente.
13. Dispositivo (1) endoscópico magnético de acuerdo con la reivindicación 12, donde los imanes (5a, 5b, 6a, 6b, 7a, 7b) tienen forma cilíndrica.
14. Dispositivo (1) endoscópico magnético de acuerdo con cualquiera de las reivindicaciones anteriores, que además comprende una primera lámina
(15) semirrígida exterior de baja fricción adecuada para interponerse entre los imanes de control (5b, 6b, 7b) Y el paciente.
15. Dispositivo (1) endoscópico magnético de acuerdo con cualquiera de las reivindicaciones anteriores, que además comprende una segunda lámina semirrígida interior de baja fricción adecuada para interponerse entre los imanes de accionamiento (5a, 6a, 7a) y el paciente, siendo dicha lámina semirrígida enrollable para permitir su introducción en el interior de la cavidad del paciente.
16. Instrumento quirúrgico (4) caracterizado porque es acoplable mecánicamente a la porción interna (2) de un dispositivo (1) endoscópico magnético de acuerdo con cualquiera de las reivindicaciones anteriores.
17. Instrumento quirúrgico (4) de acuerdo con la reivindicación 16, que consiste en unas pinzas o unas tijeras.
~1 100
-Tr ~
FIG.l
/
6b
6a ~2
FIG.2
7a
7a 5a
FIG.3
FIG.4
/ 3
14
12
~6b
~ 7b
5b
6b
FIG.Sb
~6a 7a . -~10b
10a
FIG.6
FIG.7
6a 5a 6a 5a FIG.8a FIG.8b FIG.8e
Patentes similares o relacionadas:
Método implementado por ordenador de provisión de una representación digital de una plantilla ortodóntica para la colocación de un objeto en un diente de un paciente, del 1 de Abril de 2020, de ALIGN TECHNOLOGY, INC.: Método implementado por ordenador de provisión de una representación digital de una plantilla ortodóntica para colocar un objeto en un diente de un […]
Combinación de un instrumento de terapia y formación de imagen, del 26 de Febrero de 2020, de ETHICON, INC.: Un instrumento combinado de terapia y formación de imágenes, comprendiendo el instrumento: una sonda de terapia para producir energía para alterar el tejido; […]
 Localizador de profundidad de punción vascular, del 26 de Junio de 2019, de Terumo Puerto Rico L.L.C: Conjunto de inserción vascular, que comprende:
una vaina de inserción ;
un dilatador ;
la vaina de inserción […]
Localizador de profundidad de punción vascular, del 26 de Junio de 2019, de Terumo Puerto Rico L.L.C: Conjunto de inserción vascular, que comprende:
una vaina de inserción ;
un dilatador ;
la vaina de inserción […]
Sistemas y métodos para la fabricación de una plantilla dental, del 28 de Mayo de 2019, de ALIGN TECHNOLOGY, INC.: Método para fabricación de una plantilla dental para posicionar un objeto en un diente de un paciente, que comprende: crear un modelo de diente […]
Endoscopio y dispositivo de tratamiento de accesorios integrado, del 4 de Marzo de 2019, de C.R. BARD, INC.: Endoscopio integrado que comprende un vástago que tiene extremos proximal y distal, y un dispositivo de aposición de tejido en el extremo distal […]
Microscopio quirúrgico y sensor de frente de onda integrados, del 7 de Marzo de 2018, de ALCON RESEARCH, LTD.: Un dispositivo para medir propiedades de un ojo , comprendiendo el dispositivo : un microscopio quirúrgico , un sensor de frente de […]
Fuente de alimentación para la identificación y control de herramientas quirúrgicas eléctricas, del 10 de Enero de 2018, de MICROLINE SURGICAL, INC: Un sistema para llevar a cabo cauterización térmica, que comprende: al menos un dispositivo de cauterización térmica, y una fuente de […]
Instalación para utilizar una plantilla con el fin de formar orificios para implantes en un maxilar, del 15 de Noviembre de 2017, de NOBEL BIOCARE SERVICES AG: Una instalación para formar orificios para implantes en un maxilar , comprendiendo la instalación una plantilla que se adapta a la forma […]