DISPOSITIVO PARA LA DETERMINACIÓN DE LOS AGUJEROS DE UN CLAVO INTRAMEDULAR.
Dispositivo auxiliar para la determinación de las posiciones de los agujeros (12) de los clavos intramedulares (10),
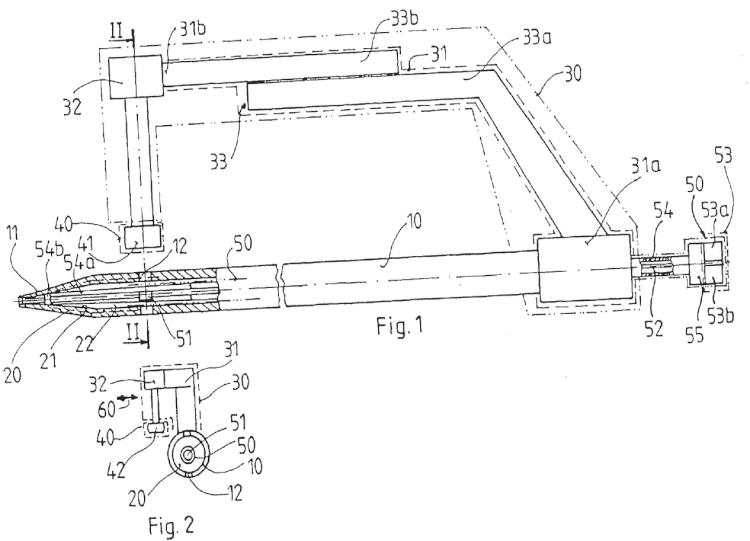
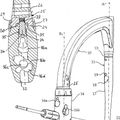
el cual contiene una unidad de fuente (40) apropiada para la emisión de señales que penetren en los tejidos corporales, una unidad de sensor (50) que coopera con la unidad de fuente (40) y una unidad de parte de posicionamiento interno (20) que puede ser conectada al clavo intramedular (10), estando o bien la unidad de fuente (40) o bien la unidad de sensor (50) fijada a la unidad de parte de posicionamiento (20), y la unidad de sensor (50) está provista de una unidad de relé (51) para la recepción de las señales de la unidad de fuente (40) y de la unidad de representación (53) conectada a la unidad de relé (51) por medio de una línea de transmisión de información (52), caracterizado porque está provisto de una unidad de parte de posicionamiento externo (30) que puede ser conectada al clavo intramedular (10), la unidad de parte de posicionamiento externo (30) incorpora una estructura de soporte (31) con extremo de fijación (31a) y un extremo libre (31b) y un miembro móvil (32) que puede ser conectado al extremo libre (31b) de la estructura de soporte (31), el extremo fijo (31a) de la estructura de soporte (31) está fijado al clavo intramedular (10) en una posición fija, mientras que la otra entre la unidad de fuente (40) y la unidad de sensor (50) está fijada al miembro móvil (32) de la unidad de parte de posicionamiento externo (30), de manera que la unidad de relé (51) de la unidad de sensor (50) y la unidad de fuente (40) están enlazadas entre sí lo cual es apropiado para el control continuo y la exacta determinación de la posición relativa entre la unidad de sensor (50) y la unidad de fuente (40) mediante la ayuda de la unidad de parte de posicionamiento externo (30) que está conectada al clavo intramedular (10)
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/HU2004/000004.
Solicitante: Sanatmetal Kft.
Nacionalidad solicitante: Hungría.
Dirección: Faiskola u. 5. 3300 Eger HUNGRIA.
Inventor/es: FARKAS,József, SMUCZER,Tibor.
Fecha de Publicación: .
Fecha Solicitud PCT: 22 de Enero de 2004.
Clasificación Internacional de Patentes:
- A61B17/17D
- A61B17/17J
Clasificación PCT:
- A61B17/17 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61B DIAGNOSTICO; CIRUGIA; IDENTIFICACION (análisis de material biológico G01N, p.ej. G01N 33/48). › A61B 17/00 Instrumentos, dispositivos o procedimientos quirúrgicos, p. ej. torniquetes (A61B 18/00 tiene prioridad; dispositivos anticonceptivos, pesarios, dispositivos para su introducción A61F 6/00; cirugía ocular A61F 9/007; cirugía otorrina A61F 11/00). › Dispositivos de guiado para taladros.
Clasificación antigua:
- A61B17/17 A61B 17/00 […] › Dispositivos de guiado para taladros.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
PDF original: ES-2357837_T3.pdf
Fragmento de la descripción:
El objeto de la invención se refiere a un dispositivo auxiliar para la determinación de las posiciones de los agujeros de unos clavos intramedulares, el cual contiene una unidad de fuente apropiada para la emisión de unas señales que penetran los tejidos corporales y a una unidad de sensor que coopera con la unidad de fuente y una unidad de parte de posicionamiento interno que puede ser conectada al clavo intramedular, estando, o bien la unidad de fuente
o bien la unidad de sensor, fijadas a la unidad de parte de posicionamiento interno, y la unidad de sensor está provista de una unidad de relé para la recepción de las señales de la unidad de fuente y una unidad de representación conectada a la unidad de relé por medio de una línea de transmisión de información.
En el curso de una intervención quirúrgica, cuando se trata de recomponer fracturas de huesos, son ampliamente utilizados unos dispositivos mecánicos de puntería para que sea más fácil encontrar los agujeros de bloqueo creados en los clavos intramedulares existentes en el hueso. Sin embargo, dichos dispositivos de puntería pueden ser solo utilizados con éxito en el caso de clavos intramedulares ligeramente deformados. En el caso de huesos tubulares largos, como por ejemplo los huesos de los brazos y las piernas, en ciertos casos los clavos intramedulares insertados en el canal medular muestran una deformación significativa, lo que reduce de manera considerable la posibilidad de encontrar con precisión los agujeros de bloqueo.
La esencia de los dispositivos de puntería utilizados en la actualidad es que el área de actuación sea expuesta a una radiación por rayos X o por rayos gamma, y la operación es monitorizada y la posición de los agujeros de bloqueo del clavo intramedular insertado en el hueso se determina con un dispositivo de intensificación de imágenes o mediante un equipo de proyección de imágenes por rayos X. El documento de la publicación No. HU T/76.155. representa, así mismo, dicha solución de intensificación de imágenes, mientras que el número de registro de descripción de la patente HU 166.829 se refiere a un aparato de rayos X accionado de manera intermitente que proporciona una imagen continua.
El documento publicado con el número HU T/73.698. describe un dispositivo de puntería en el cual el área de actuación es escaneada con un haz colimado de un isótopo radioactivo blindado, y una parte del haz que empieza desde el dispositivo de señalización que penetra los tejidos es capturada y evaluada con un detector.
El documento EP 0 135 804 A, del que procede el preámbulo de la reivindicación 1, divulga un dispositivo auxiliar para la determinación de las posiciones de los agujeros de los clavos intramedulares. Incluye una unidad de fuente para la emisión de unas señales que penetran los tejidos corporales, una unidad de sensor, la cual coopera con la unidad de fuente y una unidad de parte de posicionamiento interno la cual está conectada al clavo intramedular.
El documento US 5 433 720 A describe una unidad de parte de posicionamiento externo la cual determina la posición de los agujeros con la ayuda de unos campos magnéticos.
Sin embargo, el inconveniente básico de las soluciones conocidas es que la radiación, la cual es peligrosa para el organismo vivo, se utiliza para la determinación de la posición, de manera que el tiempo empleado en la utilización del dispositivo debe ser limitado, lo cual es ventajoso en el caso de intervenciones quirúrgicas prolongadas.
Un inconveniente adicional es que, aparte del paciente, también el cirujano está expuesto a la radiación, de manera que el tiempo transcurrido en el quirófano está también limitado lo que puede provocar retrasos en la atención médica.
Así mismo, se considera un inconveniente que los dispositivos auxiliares utilizados en la actualidad presenten una estructura compleja, sean difíciles de manejar y costosos en cuanto a su propio manejo.
Con la solución de acuerdo con la invención, nuestro objetivo fue solventar las deficiencias de los dispositivos auxiliares conocidos utilizados para la determinación de las posiciones de los agujeros de bloqueo y para crear una versión que fuera fácil de utilizar, no produjera ningún tipo de exposición a la radiación que pusiera en peligro al paciente y al cirujano que lleva a cabo la operación.
El fundamento de la idea que subyace a la invención consistió en el reconocimiento de que si el clavo intramedular propiamente dicho se utiliza como una unidad de base y un miembro de la unidad de recepctor - transmisor del dispositivo de determinación de la posición es insertado en el espacio interno del clavo intramedular, mientras que el otro miembro es desplazado a una distancia determinada a lo largo de una trayectoria medible y determinable con precisión al lado de la unidad situada en el clavo intramedular de manera que una forma ligeramente modificada del dispositivo de puntería utilizado para practicar los agujeros sea utilizada para la determinación de la trayectoria del movimiento, entonces, sobre la base de las señales del receptor puede ser determinada la posición del clavo intramedular deformado con la precisión deseada sin tener que verificar, medir o determinar la posición de los taladros de bloqueo con otros dispositivos, en un monitor bajo la forma de una imagen visible, y de esta manera la tarea puede solventarse.
De acuerdo con el objetivo propuesto, el dispositivo auxiliar para la determinación de las posiciones de los agujeros de los clavos intramedulares, el cual contiene una unidad de fuente apropiada para la emisión de señales que penetran los tejidos corporales y una unidad de sensor que coopera con la unidad de fuente y una unidad de parte de posicionamiento interno que puede ser conectada al clavo intramedular, o bien la unidad de fuente o bien la unidad de sensor son fijadas a la unidad de parte de posicionamiento interno, y la unidad de sensor está provista de una unidad de relé para la recepción de las señales de la unidad de fuente y de una unidad de representación conectada a la unidad de relé mediante una línea de transmisión de información, está construido de tal manera que esté provisto de una unidad de parte de posicionamiento externo que puede ser conectada al clavo intramedular, la unidad de parte de posicionamiento externo presenta una estructura de soporte con un extremo de fijación y un extremo libre y un miembro móvil que puede ser conectado al extremo móvil de la estructura de soporte, el extremo de fijación de la estructura de soporte es fijada al clavo intramedular en una posición fija, mientras que el otro elemento entre la unidad de fuente y la unidad de sensor es fijado al miembro móvil de la unidad de parte de posicionamiento externo, de manera que la unidad de relé de la unidad de sensor y la unidad de fuente estén interconectadas entre sí de manera que pueda efectuarse un control continuo de la exacta determinación de la posición relativa entre la unidad de sensor y la unidad de fuente con la ayuda de la unidad de parte de posicionamiento externo que está conectada al clavo intramedular.
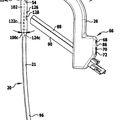
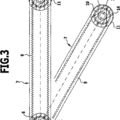
Un criterio adicional del dispositivo auxiliar de acuerdo con la invención puede consistir en que la unidad de parte de posicionamiento externo sea un manguito de guía situado en las inmediaciones del punto de entrada del clavo intramedular, equipado con una pieza de orientación que se extienda a lo largo de al menos una parte de la longitud del clavo intramedular.
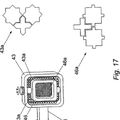
En una posible versión del dispositivo auxiliar, la unidad de sensor está completada con un cuerpo de soporte que comprende la unidad de relé y una unidad de representación, y el cuerpo de soporte presenta una superficie de recubrimiento que se adapta a la forma y el tamaño del manguito de guía, la cual puede ser insertada, al menos parcialmente, dentro del manguito de guía.
En otra estructura diferente de la invención, la superficie de recubrimiento del cuerpo de soporte de la unidad de sensor está equipada con una pieza de bloqueo que coopera con la pieza de orientación del manguito de guía de la unidad de parte de posicionamiento interno situada en el clavo intramedular.
En un ejemplo de construcción adicional del dispositivo auxiliar, la unidad de representación de la unidad de sensor está provista de un miembro de emisión de luz y / o de un miembro de emisión de sonido y de una fuente de energía.
A partir del aspecto de la invención puede ser favorable, si la unidad de fuente incorpora un imán... [Seguir leyendo]
Reivindicaciones:
1. Dispositivo auxiliar para la determinación de las posiciones de los agujeros (12) de los clavos intramedulares (10), el cual contiene una unidad de fuente (40) apropiada para la emisión de señales que penetren en los tejidos corporales, una unidad de sensor (50) que coopera con la unidad de fuente (40) y una unidad de parte de posicionamiento interno (20) que puede ser conectada al clavo intramedular (10), estando o bien la unidad de fuente (40) o bien la unidad de sensor (50) fijada a la unidad de parte de posicionamiento (20), y la unidad de sensor (50) está provista de una unidad de relé (51) para la recepción de las señales de la unidad de fuente (40) y de la unidad de representación (53) conectada a la unidad de relé (51) por medio de una línea de transmisión de información (52), caracterizado porque está provisto de una unidad de parte de posicionamiento externo (30) que puede ser conectada al clavo intramedular (10), la unidad de parte de posicionamiento externo (30) incorpora una estructura de soporte (31) con extremo de fijación (31a) y un extremo libre (31b) y un miembro móvil (32) que puede ser conectado al extremo libre (31b) de la estructura de soporte (31), el extremo fijo (31a) de la estructura de soporte (31) está fijado al clavo intramedular (10) en una posición fija, mientras que la otra entre la unidad de fuente
(40) y la unidad de sensor (50) está fijada al miembro móvil (32) de la unidad de parte de posicionamiento externo (30), de manera que la unidad de relé (51) de la unidad de sensor (50) y la unidad de fuente (40) están enlazadas entre sí lo cual es apropiado para el control continuo y la exacta determinación de la posición relativa entre la unidad de sensor (50) y la unidad de fuente (40) mediante la ayuda de la unidad de parte de posicionamiento externo (30) que está conectada al clavo intramedular (10).
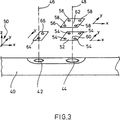
2. Dispositivo auxiliar de acuerdo con la reivindicación 1, caracterizado porque la unidad de parte de posicionamiento interno (20) es un manguito de guía (22) situado en las inmediaciones del punto de entrada (11) del clavo intramedular (10), equipado con una pieza de orientación (21), que se extiende a lo largo de al menos una parte de la longitud del clavo intramedular (10).
3. Dispositivo auxiliar de acuerdo con la reivindicación 2, caracterizado porque, la unidad de sensor (50) es completada con un cuerpo de soporte (54) que comprende la unidad de relé (51) y la unidad de representación (53), y el cuerpo de soporte (54) presenta una superficie de recubrimiento (54a) adaptada a la forma y el tamaño del manguito de guía (22), la cual puede, al menos parcialmente, ser insertada dentro del manguito de guía (22).
4. Dispositivo auxiliar de acuerdo con la reivindicación 3, caracterizado porque la superficie de recubrimiento (54a) del cuerpo de soporte (54) de la unidad de sensor (50) está equipada con una pieza de bloqueo (54b) que coopera con la pieza de orientación (21) del manguito de guía (22) de la unidad de parte de posicionamiento interno (20) situada dentro del clavo intramedular (10).
5. Dispositivo auxiliar de acuerdo con cualquiera de las reivindicaciones 1 a 4, caracterizado porque la unidad de representación (53) de la unidad de sensor (50) está provista de un miembro de emisión de luz (53a) y / o de un miembro de emisión de sonido (53b).
6. Dispositivo auxiliar de acuerdo con cualquiera de las reivindicaciones 1 a 5, caracterizado porque la unidad de sensor (50) está provista de una fuente de energía (55).
7. Dispositivo auxiliar de acuerdo con cualquiera de las reivindicaciones 1 a 6, caracterizado porque la unidad de fuente (40) incorpora un imán natural (41) que crea un campo magnético.
8. Dispositivo auxiliar de acuerdo con cualquiera de las reivindicaciones 1 a 6, caracterizado porque la unidad de fuente (40) incorpora una fuente de radiación (42) apropiada para la emisión de radiación con una longitud de onda que penetra en los tejidos.
9. Dispositivo auxiliar de acuerdo con cualquiera de las reivindicaciones 1 a 8, caracterizado porque la estructura de soporte (31) es una unidad de puntería (33) en sí misma conocida.
Patentes similares o relacionadas:
INSTRUMENTOS PARA LA INSERCIÓN DE UN CLAVO INTRAMEDULAR, del 18 de Julio de 2011, de SMITH & NEPHEW, INC.: Un conjunto de escariado para crear una puerta de entrada en el canal de un hueso y proporcionar un canal de trabajo en el cual escariar el canal de hueso, […]
 APARATO DE PUNTERÍA PARA UN CLAVO DE BLOQUEO, del 3 de Marzo de 2011, de STRYKER TRAUMA GMBH: Aparato de puntería para un clavo de bloqueo con dos circuitos oscilantes dispuestos a lo largo del sentido longitudinal […]
APARATO DE PUNTERÍA PARA UN CLAVO DE BLOQUEO, del 3 de Marzo de 2011, de STRYKER TRAUMA GMBH: Aparato de puntería para un clavo de bloqueo con dos circuitos oscilantes dispuestos a lo largo del sentido longitudinal […]
 SISTEMA PARA UBICAR AGUJEROS DISTALES DE UN CLAVO INTRAMEDULAR, del 17 de Febrero de 2011, de L.R.S. ORTHO LTD: Un sistema para ser utilizado con un clavo intramedular hueco que tiene un extremo proximal (11a), un extremo distal (11b) y al menos un agujero distal formado […]
SISTEMA PARA UBICAR AGUJEROS DISTALES DE UN CLAVO INTRAMEDULAR, del 17 de Febrero de 2011, de L.R.S. ORTHO LTD: Un sistema para ser utilizado con un clavo intramedular hueco que tiene un extremo proximal (11a), un extremo distal (11b) y al menos un agujero distal formado […]
 JUEGO DE IMPLANTES, del 10 de Septiembre de 2010, de AESCULAP AG: Juego de implantes que comprende al menos dos implantes conformados de maneras distintas que comprenden respectivamente un vástago (15, […]
JUEGO DE IMPLANTES, del 10 de Septiembre de 2010, de AESCULAP AG: Juego de implantes que comprende al menos dos implantes conformados de maneras distintas que comprenden respectivamente un vástago (15, […]
 APARATO DE PUNTERIA PARA UN CLAVO PARA FRACTURAS, del 7 de Mayo de 2010, de TANTUM AG: Aparato de puntería para un clavo para fracturas , que comprende un brazo de puntería que presenta en uno de sus extremos un medio de unión para […]
APARATO DE PUNTERIA PARA UN CLAVO PARA FRACTURAS, del 7 de Mayo de 2010, de TANTUM AG: Aparato de puntería para un clavo para fracturas , que comprende un brazo de puntería que presenta en uno de sus extremos un medio de unión para […]
 APARATO PARA ALINEAR Y COLOCAR IMPLANTES EN UN CUERPO, del 4 de Marzo de 2010, de GRAMPIAN HEALTH BOARD: Un conjunto que comprende:
un fijador para la manipulación de al menos un implante para inserción en el cuerpo de un paciente; y
un dispositivo de soporte para inserción […]
APARATO PARA ALINEAR Y COLOCAR IMPLANTES EN UN CUERPO, del 4 de Marzo de 2010, de GRAMPIAN HEALTH BOARD: Un conjunto que comprende:
un fijador para la manipulación de al menos un implante para inserción en el cuerpo de un paciente; y
un dispositivo de soporte para inserción […]
 CLAVO INTRAMEDULAR CON CUERPO DE PUNTERIA, del 3 de Noviembre de 2009, de AESCULAP AG: Clavo intramedular con un vástago insertable en la cavidad medular de un hueso de caña, que presenta varios taladros pasantes de orientación diametral […]
CLAVO INTRAMEDULAR CON CUERPO DE PUNTERIA, del 3 de Noviembre de 2009, de AESCULAP AG: Clavo intramedular con un vástago insertable en la cavidad medular de un hueso de caña, que presenta varios taladros pasantes de orientación diametral […]
Sistemas para transporte óseo, del 1 de Julio de 2020, de NuVasive Specialized Orthopedics, Inc: Un sistema para transporte óseo comprendiendo: un implante de longitud ajustable configurado para colocación intramedular y comprendiendo: […]