Dispositivo de manipulación automático.
El dispositivo de manipulación automático diseñado para manipular artículos de un lugar a otro,
especialmente para la estiba y el cambio de piezas de trabajo en máquinas, que incluye un cargador (2), unmanipulador (3) y una unidad de control (4), conectada tanto con el bloque de control (5) del dispositivo operadocomo a las unidades funcionales del cargador (2) y el manipulador (3), está caracterizado por el hecho de queconsiste en una base de soporte (1) dotada de un revestimiento (14) con un cargador (2) y un manipulador (3) quese fijan en la superficie de la base; el cargador (2) y el manipulador (3) se conectan con la unidad de control (4)ubicada en el exterior del revestimiento (14) con el cargador (2) constituido por un poste de soporte incrustadomediante rotación (21) en el que se fijan una o más áreas de almacenamiento (22) situadas horizontalmente lasunas encima de las otras y el manipulador (3) constituido por una unidad de altura (31), una unidad de rotación (32)y una unidad oscilante (33) que se acoplan mutuamente; hay un adaptador (34) dotado de medios técnicos para lasujeción y transferencia de artículos conectados a la parte extrema de la unidad oscilante.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/CZ2010/000039.
Solicitante: Protechnik S.R.O.
Nacionalidad solicitante: República Checa.
Dirección: 569 32 Staré Mesto 247 REPUBLICA CHECA.
Inventor/es: TANNO, DANIEL.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B23Q7/02 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B23 MAQUINAS-HERRAMIENTAS; TRABAJO DE METALES NO PREVISTO EN OTRO LUGAR. › B23Q PARTES CONSTITUTIVAS, DISPOSITIVOS O ACCESORIOS DE MAQUINAS HERRAMIENTAS, p. ej. DISPOSITIVOS PARA COPIAR O CONTROLAR (herramientas del tipo utilizado en tornos o máquinas de agujerear B23B 27/00 ); MAQUINAS HERRAMIENTAS DE UTILIZACION GENERAL, CARACTERIZADAS POR LA ESTRUCTURA DE CIERTAS PARTES CONSTITUTIVAS O DISPOSITIVOS; COMBINACIONES O ASOCIACIONES DE MAQUINAS PARA TRABAJAR EL METAL NO DESTINADAS A UN TRABAJO EN PARTICULAR. › B23Q 7/00 Dispositivos para la manipulación de piezas, especialmente combinados a las máquinas-herramientas o dispuestos en estas máquinas o especialmente concebidos para ser utilizados en relación con estas máquinas, p. ej. para el transporte, la carga, la colocación, la descarga, la selección (incorporados a los husillos de trabajo B23B 13/00, B23B 19/02; para tornos automáticos o semiautomáticos B23B 15/00). › por medio de tambores, de mesas rotativas o de plataformas.
- B23Q7/04 B23Q 7/00 […] › por medio de pinzas.
- B23Q7/10 B23Q 7/00 […] › por medio de depósitos.
PDF original: ES-2398932_T3.pdf
Fragmento de la descripción:
Dispositivo de manipulación automático Área tecnológica La invención supone la construcción de un dispositivo de manipulación automático diseñado para manipular artículos de un lugar a otro, especialmente para la estiba y el cambio de piezas de trabajo en máquinas y centros numéricamente controlados, en almacenes, en líneas de montaje, en talleres de pintura, etc.
Estado existente de la tecnología En la actualidad, hay muchos sistemas automáticos específicos para la manipulación de artículos; su construcción y diseño se basan especialmente en el lugar en el que pueden ser utilizados y el tipo de productos que son portados. En la mayoría de los casos incluyen sistemas con robots industriales o mecanismos de intercambio basados en una transmisión lineal en un plano horizontal o vertical. La desventaja de usar los robots industriales es su elevado precio de compra, su difícil programación, su capacidad de carga relativamente baja y las demandas de un área de cobertura considerable cuando es necesario proporcionar un vallado de protección del lugar de trabajo o ubicar el robot en una cabina especial para garantizar la seguridad. Y la desventaja de usar los mecanismos de intercambio basados en una transmisión lineal es su exigente y complicada compensación de deformación cuando el brazo está extendido y bajo una carga más elevada. El incremento de rigidez lleva entonces a costes de adquisición más elevados, a construcciones más robustas y por lo tanto a demandas de una mayor área de cobertura. La desventaja común de todos los sistemas conocidos incluye su fijación directamente a la máquina o al suelo delante o al lado de la máquina, lo cual limita el acceso de los operarios y básicamente impide la utilización de ese espacio por otras instalaciones. Los cargadores de estos dispositivos de manipulación normalmente incluyen mesas, estantes, cajones, cintas, palés o vías desde las que las piezas de trabajo son cogidas o retiradas por diversos tipos de manipuladores giratorios o deslizables linealmente que se anclan firmemente al suelo o a la base común.
Los diseños especificados en los documentos CZ 271786, CZ 278074, CZ 258611, CZ 1992-3889 A1, EP 1481758, EP 1388391, EP 1775072, EP 1293307, US 2002025757 A1, DE 19641534 o EP 620078 se pueden mencionar como ejemplos de los dispositivos descritos anteriormente.
La tarea de la invención presentada es ofrecer un nuevo dispositivo de manipulación automático móvil de una construcción modular relativamente simple que permitiera una utilización multiuso para la manipulación de artículos en diversas máquinas, líneas de producción y en almacenes con alimentación frontal y lateral. Permitir un acceso sin problemas al espacio de trabajo de la máquina, conseguir la movilidad del manipulador en tres ejes mientras se garantiza una elevada rigidez y capacidad de carga de la construcción y se cumple la exigencia de un área de cobertura relativamente pequeña es otro desafío de la solución presentada.
Principio de la invención El objetivo especificado anteriormente se cumple mediante una invención que supone un dispositivo de manipulación automático diseñado para manipular artículos de un lugar a otro, especialmente para la estiba y el cambio de piezas de trabajo y que incluye un cargador, un manipulador y una unidad de control que se conecta tanto al bloque de control del dispositivo operado como a las unidades funcionales del cargador y el manipulador. El principio de la invención incluye el hecho de que el dispositivo consiste en una base de soporte dotada de un revestimiento con un cargador y un manipulador que se fijan a la superficie de la base y se conectan con la unidad de control ubicada en el exterior del revestimiento; el cargador consiste en un poste de soporte incrustado mediante rotación en el que hay una o más áreas de almacenamiento situadas unas encima de las otras; el manipulador consiste en una unidad de altura, una unidad de rotación y una unidad oscilante que se acoplan mutuamente; hay un adaptador dotado de medios técnicos para la sujeción y la transferencia de artículos conectados a la parte extrema de la unidad oscilante.
La opción de una condición ventajosa incluye una base que está dotada de medios de desplazamiento, elementos de posición de fijación y una agarradera, con el poste de soporte estando provisto de la primera transmisión, conectada con la unidad de control y el revestimiento estando dotado de una puerta de entrada, al menos una ventana de estiba y finalmente un orificio de inspección.
Por último, es útil cuando el manipulador consiste en una unidad de altura que comprende una línea de poste conectada a la base con una unidad deslizable ajustable en altura en el exterior o en el interior de ella; esta unidad está dotada de la segunda transmisión y hay una unidad de rotación fijada mediante rotación en su extremo abierto; la unidad de rotación está dotada de la tercera transmisión y comprende un brazo situado horizontalmente con la unidad oscilante en forma de un paralelogramo que se fija a su extremo abierto; la unidad oscilante está dotada de la cuarta transmisión donde hay un adaptador montado en la parte extrema de la unidad oscilante. Todas las transmisiones se conectan a la unidad de control.
La invención presentada aporta un nuevo y mayor efecto desde el punto de vista de su movilidad, caracterizado por su diseño simple y su usabilidad universal para manipular diversos artículos, por ejemplo en máquinas con estiba tanto frontal como lateral de piezas de trabajo. Por lo que se refiere al concepto, el dispositivo permite la programación que es la misma o prácticamente similar a la de una máquina con control numérico por ordenador; el sistema manipulador permite usar más puntos cero programables y acceder tanto a más niveles de las áreas de almacenamiento del cargador como a los espacios internos de las áreas de almacenamiento individuales. El adaptador extremo del paralelogramo se puede ajustar para la conexión de componentes tecnológicos con diversos procedimientos de conexión, ya sea mecánica, electromagnética, neumática o hidráulica.
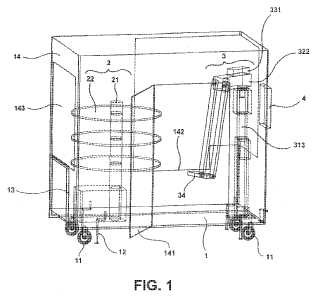
Descripción de las figuras en los dibujos adjuntos Un ejemplo específico del diseño de la invención se muestra esquemáticamente en los dibujos adjuntos en los que la fig. 1 es una vista axonométrica general del dispositivo de manipulación automático y
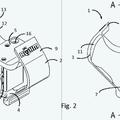
la fig. 2 es una vista axonométrica del dispositivo de la fig. 1 con el revestimiento estando retirado y que muestra esquemáticamente la conexión de la unidad de control. Ejemplos del diseño de la invención El dispositivo de manipulación automático consiste en una base de soporte 1 con un cargador 2 y un manipulador 3 que se fijan en sus partes externas opuestas. La base 1 está formada en una condición ventajosa en forma de rectángulo y en su parte inferior está dotada de medios de desplazamiento 11, por ejemplo en forma de ruedas o rodillos. La base 1 está dotada además de elementos de fijación de posición 12, con una condición ventajosa en forma de puntales ajustables en altura ubicados en los medios de desplazamiento 12 y una agarradera de control 13 fijada a una de las caras laterales de la base 1. La base 1 está dotada de un revestimiento 14 con una puerta de entrada 141, al menos una ventana de estiba 142 para permitir la conexión del espacio interno del revestimiento 14 con un espacio de trabajo no mostrado de la máquina. En el lado adyacente a la agarradera de control 13, hay un orificio de inspección 143 para permitir que los operarios se orienten cuando pongan la máquina en la posición de trabajo.
El cargador 2 consiste en un poste de soporte incrustado mediante rotación 21 con una o más áreas de almacenamiento 22 situadas horizontalmente unas encima de las otras que se fijan en ese poste. La rotación de las áreas de almacenamiento es proporcionada por la primera transmisión 23 que se conecta con la unidad de control 4 compuesta por ejemplo por un ordenador con una visualización interactiva.
El manipulador 3 consiste en una unidad de altura 31 que comprende una línea de poste 311 conectada a la base 1 usando una placa de fijación 312. En la cavidad interna del manipulador hay una unidad deslizable ajustable en altura 313 dotada de la segunda transmisión 314 que permite su ajuste en altura continuo y la conexión con la unidad de control 4 que se conecta además con el bloque de control 5 de una máquina que no se muestra. En el extremo abierto, por ejemplo un árbol, de la unidad deslizable hay una unidad de rotación fijada mediante rotación 32 dotada de la tercera transmisión 321, conectada con la unidad de control 4. La unidad de rotación 32 consiste en un brazo situado horizontalmente 322 con una unidad oscilante... [Seguir leyendo]
Reivindicaciones:
1. El dispositivo de manipulación automático diseñado para manipular artículos de un lugar a otro, especialmente para la estiba y el cambio de piezas de trabajo en máquinas, que incluye un cargador (2) , un manipulador (3) y una unidad de control (4) , conectada tanto con el bloque de control (5) del dispositivo operado como a las unidades funcionales del cargador (2) y el manipulador (3) , está caracterizado por el hecho de que consiste en una base de soporte (1) dotada de un revestimiento (14) con un cargador (2) y un manipulador (3) que se fijan en la superficie de la base; el cargador (2) y el manipulador (3) se conectan con la unidad de control (4) ubicada en el exterior del revestimiento (14) con el cargador (2) constituido por un poste de soporte incrustado mediante rotación (21) en el que se fijan una o más áreas de almacenamiento (22) situadas horizontalmente las unas encima de las otras y el manipulador (3) constituido por una unidad de altura (31) , una unidad de rotación (32) y una unidad oscilante (33) que se acoplan mutuamente; hay un adaptador (34) dotado de medios técnicos para la sujeción y transferencia de artículos conectados a la parte extrema de la unidad oscilante.
2. Un dispositivo de manipulación automático de acuerdo con la reivindicación 1, caracterizado por el hecho de que la base está dotada de medios de desplazamiento (11) , elementos de fijación de posición (12) y una agarradera (13) .
3. Un dispositivo de manipulación automático de acuerdo con la reivindicación 1 ó 2, caracterizado por el hecho de que el poste de soporte (21) está dotado de la primera transmisión (23) conectada con la unidad de control (4) .
4. Un dispositivo de manipulación automático de acuerdo con cualquier reivindicación 1 a 3, caracterizado por el hecho de que el revestimiento (14) está dotado de una puerta de entrada (141) , al menos una ventana de estiba (142) y finalmente un orificio de inspección.
5. Un dispositivo de manipulación automático de acuerdo con cualquier reivindicación 1 a 4, caracterizado por el hecho de que el manipulador (3) consiste en una unidad de altura (31) que comprende una línea de poste (311) conectada a la base (1) con una unidad deslizable ajustable en altura (313) en el exterior o en el interior de ella; esta unidad (313) está dotada de la segunda transmisión (314) y hay una unidad de rotación (32) en su extremo abierto incrustada mediante rotación; la unidad de rotación (32) está dotada de la tercera transmisión
(321) y comprende un brazo situado horizontalmente (322) con la unidad oscilante (33) en forma de paralelogramo que se fija a su extremo abierto; la unidad oscilante (33) está dotada de la cuarta transmisión (331) donde hay un adaptador (34) montado en la parte extrema de la unidad oscilante (33) . Todas las transmisiones (314) , (321) y (331) se conectan a la unidad de control (4) .
Patentes similares o relacionadas:
Máquina de mecanizado con dispositivo de carga de piezas de trabajo, del 10 de Junio de 2020, de GEBR. HELLER MASCHINENFABRIK GMBH: Máquina de mecanizado : con un grupo de husillos posicionables giratoriamente o accionables de forma giratoria alrededor de ejes (26, 27, […]
Máquina herramienta, en particular máquina fresadora de husillos múltiples, del 6 de Mayo de 2020, de DECKEL MAHO PFRONTEN GMBH: Máquina herramienta con: - un bastidor de máquina ; - una instalación de fijación de la pieza de trabajo para el empotramiento de una […]
Procedimiento para la preparación de piezas de trabajo y máquina herramienta para la realización del procedimiento, del 22 de Enero de 2020, de STAMA MASCHINENFABRIK GMBH: Procedimiento para la mecanización de piezas de trabajo en una máquina herramienta con un husillo de trabajo desplazable con relación a un dispositivo […]
Dispositivo de procesamiento con una mesa de piezas de trabajo, del 6 de Noviembre de 2019, de HOMAG GmbH: Dispositivo de procesamiento , en particular para el procesamiento de piezas de trabajo de madera, de materiales de trabajo derivados de la madera, de […]
Dispositivo de mecanizado para piezas de trabajo y procedimiento para el mismo, del 4 de Septiembre de 2019, de HOMAG GmbH: Dispositivo de mecanizado para piezas de trabajo, en particular de madera, plástico o similar, con una primera mesa de piezas de trabajo que puede […]
Procedimiento para mecanizar piezas de trabajo en una máquina herramienta así como máquina herramienta para ello, del 21 de Agosto de 2019, de Ezu-Metallwaren GmbH & Co. KG: Procedimiento para el mecanizado, preferiblemente con arranque de virutas, de piezas de trabajo en una máquina herramienta con un husillo […]
 Pinza y procedimiento para fabricar una pinza, del 30 de Mayo de 2019, de ROHM GMBH: Pinza con dos flancos laterales , que están unidos entre sí directa o indirectamente en un extremo y entre ellos se extiende un espacio que incluye un medio […]
Pinza y procedimiento para fabricar una pinza, del 30 de Mayo de 2019, de ROHM GMBH: Pinza con dos flancos laterales , que están unidos entre sí directa o indirectamente en un extremo y entre ellos se extiende un espacio que incluye un medio […]
BRIDA DE SUJECIÓN NEUMÁTICA PARA UTILLAJES, del 17 de Mayo de 2019, de SARABIA TRILLA, Miquel: 1. Brida de sujeción neumática mejorada para sujetar mediante un pisador con una cierta presión/esfuerzo a una chapa o similar, siendo susceptible la brida de sujeción […]