Dispositivo de curvado.
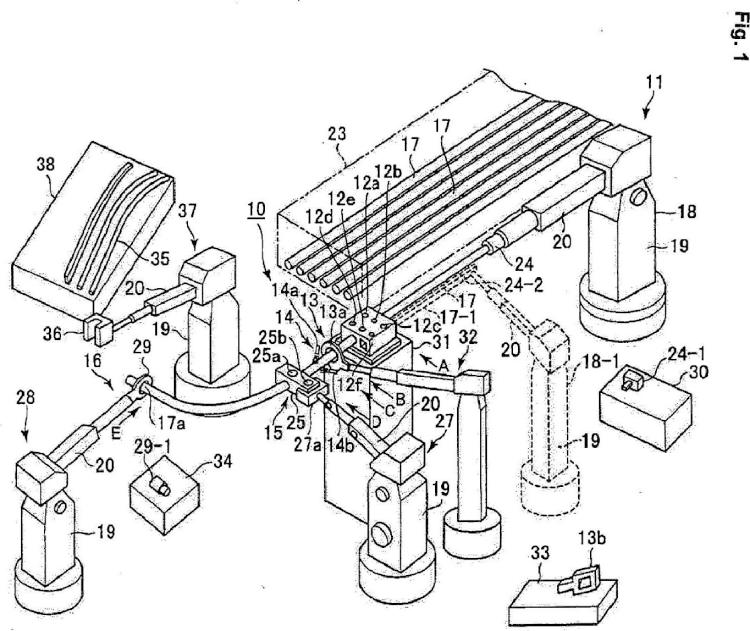
Un aparato (10) de curvado que comprende un mecanismo (11) de alimentación,
un primer mecanismo (12) de soporte, un mecanismo (13) de calentamiento, un mecanismo (14) de refrigeración, y un segundo mecanismo (15) de soporte como se describe a continuación:
el mecanismo (11) de alimentación está adaptado para alimentar un tubo (17) de acero en su dirección longitudinal,
el primer mecanismo (12) de soporte está fijo en una primera posición y adaptado para soportar el tubo (17) de acero durante su alimentación,
el mecanismo (13) de calentamiento está fijo en una segunda posición que está localizada corriente abajo de la primera posición en la dirección de alimentación del tubo de acero, y adaptado para calentar una parte o la totalidad del tubo (17) de acero alimentado,
el mecanismo (14) de refrigeración está fijo en una tercera posición que está localizada corriente abajo de la segunda posición en la dirección de alimentación del tubo de acero, y adaptado para refrigerar la parte del tubo de acero alimentado que se ha calentado por el mecanismo de calentamiento,
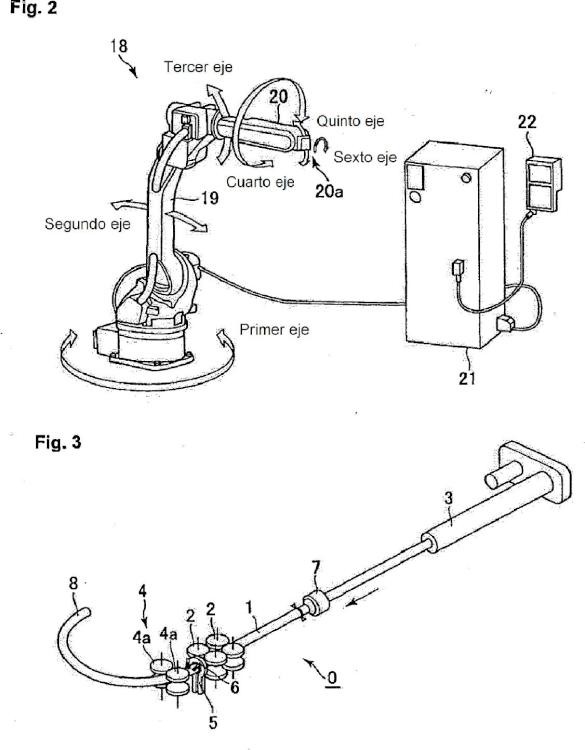
el segundo mecanismo (15) de soporte está dispuesto en una cuarta posición que está localizada corriente abajo de la tercera posición en la dirección de alimentación del tubo de acero, y adaptado para aplicar un momento de flexión a la parte calentada del tubo de acero mediante un movimiento bidimensional o tridimensional mientras que soporta el tubo de acero alimentado en al menos una localización, procesando de este modo el tubo de acero con el fin de que pueda curvarse en una forma requerida, caracterizado porque el mecanismo (11) de alimentación consiste en un primer robot (18) industrial.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/JP2010/058301.
Solicitante: NIPPON STEEL & SUMITOMO METAL CORPORATION.
Nacionalidad solicitante: Japón.
Dirección: 6-1, Marunouchi 2-chome, Chiyoda-ku Tokyo 100-8071 JAPON.
Inventor/es: INOUE, SABURO, TOMIZAWA,ATSUSHI, KUWAYAMA,SHINJIRO.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B21D7/16 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B21 TRABAJO MECANICO DE LOS METALES SIN ARRANQUE SUSTANCIAL DE MATERIAL; CORTE DEL METAL POR PUNZONADO. › B21D TRABAJO MECANICO O TRATAMIENTO DE CHAPAS, TUBOS, BARRAS O PERFILES METALICOS SIN ARRANQUE SUSTANCIAL DE MATERIAL; CORTE DE METALES POR PUNZONADO (trabajo mecánico o tratamiento de alambre B21F). › B21D 7/00 Curvado de barras, perfiles o tubos (B21D 11/02 - B21D 11/18 tienen prioridad; mediante la utilización de mandriles u órganos análogos B21D 9/00). › Equipo auxiliar, p. ej. para calentar o enfriar los codos.
PDF original: ES-2517315_T3.pdf
Fragmento de la descripción:
Dispositivo de curvado Campo técnico
La presente invención se refiere a un aparato de curvado que tiene como componente un robot industrial. Específicamente, la presente invención se refiere a un aparato de curvado para fabricar un elemento curvado aplicando una flexión bidimensional o tridimensional a una pieza en bruto de metal larga que tiene una sección transversal cerrada.
Antecedentes de la técnica
Los elementos de resistencia, los elementos de refuerzo, o los elementos estructurales fabricados de metal y que tienen una forma doblada se usan en automóviles y diversos tipos de máquinas y similares. Estos elementos curvados necesitan tener una resistencia alta, un peso ligero, y un tamaño pequeño. Este tipo de elemento curvado se ha fabricado mediante la soldadura de elementos formados en prensa, el punzonado de una placa, la forja, y similares. Sin embargo, es difícil reducir aún más el peso y el tamaño de los elementos curvados fabricados mediante estos procedimientos de fabricación.
En los últimos años, la fabricación de este tipo de elemento curvado mediante la denominada técnica de hidroconformado de tubos se ha estudiado activamente (véase, por ejemplo, el documento 1 no de patente). Como se describe en la página 28 del documento 1 no de patente, hay diversos desafíos en la técnica de hidroconformado de tubos, tales como el desarrollo de materiales para su uso en el procedimiento y el aumento del grado de libertad de las formas que pueden formarse y, por lo tanto, son necesarios más avances tecnológicos en el futuro.
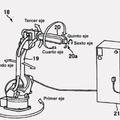
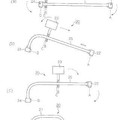
En el documento 1 de patente, el presente solicitante desvela un aparato de curvado. La figura 3 es una vista explicativa que muestra esquemáticamente tal aparato de curvado.
Como se muestra en la figura 3, el aparato de curvado fabrica un elemento 8 curvado que de manera intermitente o continua tiene una parte doblada que se dobla bidimensional o tridimensionalmente y una parte endurecida por temple en su dirección longitudinal y/o en la dirección circunferencial en una superficie que interseca la dirección longitudinal, con una alta eficacia de funcionamiento, a la vez que mantiene una adecuada precisión de curvado. Con este fin, el aparato de curvado realiza las siguientes operaciones en un tubo 1 de acero que es una pieza en bruto (un material a procesar) y que está soportado por unos medios 2 de soporte con el fin de que pueda moverse en su dirección axial durante la alimentación del tubo 1 de acero desde un lado corriente arriba hacia un lado corriente abajo usando un dispositivo 3 de alimentación, tal como un tornillo de bolas:
(a) calentar rápidamente una parte del tubo 1 de acero con un serpentín 5 de calentamiento de alta frecuencia localizado corriente abajo de los medios 2 de soporte en un intervalo de temperatura en el que sea posible un endurecimiento por temple,
(b) refrigerar rápidamente el tubo 1 de acero con un dispositivo 6 de refrigeración de agua dispuesto corriente abajo del serpentín 5 de calentamiento de alta frecuencia, y
(c) aplicar un momento de flexión a la parte calentada del tubo 1 de acero para realizar el curvado variando de manera bidimensional o tridimensional la posición de una matriz 4 de rodillos móvil que tiene al menos un conjunto de pares 4a de rodillos que pueden soportar el tubo 1 de acero durante su alimentación.
El documento 2 de patente describe otro aparato para doblar tridimensionalmente un material metálico. En el mismo, el material metálico está soportado por unos medios de soporte, durante la alimentación del mismo de arriba hacia abajo. La posición de una matriz de rodillos móvil que tiene una pluralidad de rodillos para alimentar el material metálico en la dirección axial se cambia tridimensionalmente.
Lista de documentos de la técnica anterior
Documento 1 de patente: WO 26/936 Documento 2 de patente: WO 28/12355
Documento 1 no de patente: Jidosha Gijustsu (Journal of Society of Automotive Engineers of Japan), volumen 57, n2 6, 23, páginas 23-28.
Divulgación de la invención
Como resultado de las diligentes investigaciones dirigidas a mejorar aún más el aparato de curvado, los presentes inventores han descubierto que el aparato de curvado tiene los siguientes problemas.
(a) Un dispositivo 3 de alimentación que usa un tornillo de bolas o similares necesita configurarse de acuerdo con el tipo de tubo 1 de acero. La configuración requiere un tiempo considerable. Como resultado, se incrementa el tiempo de ciclo del aparato de curvado y se degrada su productividad. Además, cuando se cambia la línea de trayectoria del tubo 1 de acero, es necesario ajustar la posición de instalación del dispositivo 3 de alimentación de acuerdo con el cambio en la línea de trayectoria, lo que lleva a una disminución en la productividad del
aparato de curvado.
(b) Un dispositivo 3 de alimentación que usa un tornillo de bolas o similares alimenta un tubo 1 de acero accionando el tornillo de bolas después de que se haya colocado el tubo 1 de acero en el dispositivo de alimentación. Por lo tanto, es difícil reducir el intervalo de producción.
(c) Es necesario sincronizar la temporización de funcionamiento de un dispositivo 3 de alimentación que usa un tornillo de bolas o similares y una matriz 4 de rodillos móvil. Sin embargo, es difícil sincronizarlos con precisión, y si no se sincronizan con precisión, empeora la precisión dimensional de un elemento de curvado.
(d) Se requiere un gran espacio de instalación para un dispositivo 3 de alimentación que usa un tornillo de bolas o similares y un dispositivo de soporte para soportar una matriz 4 de rodillos de manera que la matriz 4 pueda moverse tridimensionalmente. Esto crea limitaciones sobre dónde puede instalarse el aparato de curvado.
(e) En el caso de un tubo 1 de acero que es un tubo de acero soldado, un dispositivo 3 de alimentación que usa un tornillo de bolas o similares no puede realizar operaciones distintas de la alimentación cuando el tubo 1 de acero se coloca en el mismo (tal como la rotación de un tubo 1 de acero alrededor de su eje) de manera que la posición del cordón de soldadura en el tubo 1 de acero se ajusta en una posición que no provoque problemas durante el curvado, ajustando cualquier desplazamiento del eje longitudinal del tubo 1 acero cuando se coloca en el mismo, y ajustando la trayectoria de alimentación, lo que lleva a una disminución en la productividad del aparato de curvado.
(f) Un dispositivo 3 de alimentación que usa un tornillo de bolas o similares y una matriz 4 de rodillos móvil que tiene al menos un conjunto de pares 4a de rodillos requieren un funcionamiento muy preciso, lo que hace necesario realizar periódicamente la limpieza y la reparación de estos componentes. Sin embargo, la facilidad de mantenimiento del dispositivo 3 de alimentación y la matriz 4 de rodillos móvil no es buena. Por lo tanto, la reparación y la limpieza del dispositivo 3 de alimentación y la matriz 4 de rodillos móvil requieren una cantidad considerable de tiempo y de horas-hombre.
Como resultado de diligentes investigaciones para resolver los problemas descritos anteriormente, los presentes inventores han descubierto que los problemas (a) - (f) descritos anteriormente pueden resolverse usando un robot industrial del tipo articulado verticalmente, por ejemplo, como al menos un dispositivo de alimentación y, si fuera necesario, usando un robot industrial del tipo articulado verticalmente, por ejemplo, como un dispositivo de soporte para una matriz de rodillos móvil o como un dispositivo para evitar una reducción de la precisión dimensional instalado en el lado de salida de la matriz de rodillos móvil con el fin de aumentar la precisión dimensional. Como resultado de investigaciones adicionales, completaron la presente invención.
La presente invención es un aparato de curvado que comprende un mecanismo de alimentación, un primer mecanismo de soporte, un mecanismo de calentamiento, un mecanismo de refrigeración, un segundo mecanismo de soporte, y un mecanismo para evitar la deformación, cumpliendo cada uno las siguientes condiciones:
el mecanismo de alimentación se compone de un primer robot industrial y es capaz de alimentar un tubo de acero en su dirección longitudinal,
el primer mecanismo de soporte está fijo en una primera posición y es capaz de soportar el tubo de acero durante su alimentación,
el mecanismo de calentamiento está fijo en una segunda posición que está localizada corriente abajo de la primera posición en la dirección de alimentación del tubo de acero, y es capaz de calentar una parte o la totalidad del tubo de acero alimentado,
el mecanismo de refrigeración está fijo... [Seguir leyendo]
Reivindicaciones:
1. Un aparato (1) de curvado que comprende un mecanismo (11) de alimentación, un primer mecanismo (12) de soporte, un mecanismo (13) de calentamiento, un mecanismo (14) de refrigeración, y un segundo mecanismo (15) de soporte como se describe a continuación:
el mecanismo (11) de alimentación está adaptado para alimentar un tubo (17) de acero en su dirección longitudinal,
el primer mecanismo (12) de soporte está fijo en una primera posición y adaptado para soportar el tubo (17) de acero durante su alimentación,
el mecanismo (13) de calentamiento está fijo en una segunda posición que está localizada corriente abajo de la primera posición en la dirección de alimentación del tubo de acero, y adaptado para calentar una parte o la totalidad del tubo (17) de acero alimentado,
el mecanismo (14) de refrigeración está fijo en una tercera posición que está localizada corriente abajo de la segunda posición en la dirección de alimentación del tubo de acero, y adaptado para refrigerar la parte del tubo de acero alimentado que se ha calentado por el mecanismo de calentamiento,
el segundo mecanismo (15) de soporte está dispuesto en una cuarta posición que está localizada corriente abajo de la tercera posición en la dirección de alimentación del tubo de acero, y adaptado para aplicar un momento de flexión a la parte calentada del tubo de acero mediante un movimiento bidimensional o tridimensional mientras que soporta el tubo de acero alimentado en al menos una localización, procesando de este modo el tubo de acero con el fin de que pueda curvarse en una forma requerida, caracterizado porque el mecanismo (11) de alimentación consiste en un primer robot (18) industrial.
2. Un aparato de curvado como se establece en la reivindicación 1, caracterizado porque el segundo mecanismo (15) de soporte está soportado por al menos un segundo robot (27) industrial.
3. Un aparato de curvado como se establece en la reivindicación 2, en el que el segundo robot (27) industrial es un robot articulado verticalmente.
4. Un aparato de curvado como se establece en la reivindicación 3, en el que el robot articulado verticalmente que es el segundo robot (27) industrial tiene al menos cinco ejes.
5. Un aparato de curvado como se establece en una cualquiera de las reivindicaciones anteriores, en el que el primer robot (18) industrial es un robot articulado verticalmente.
6. Un aparato de curvado como se establece en la reivindicación 5, en el que el robot articulado verticalmente que es el primer robot (18) industrial tiene al menos cinco ejes.
7. Un aparato de curvado como se establece en la reivindicación 1, adaptado para realizar el procedimiento de curvado en un estado tibio o un estado caliente.
8. Un aparato de curvado como se establece en una cualquiera de las reivindicaciones anteriores,
en el que el primer robot (18) industrial está adaptado, además, para hacer girar el tubo (17) de acero alrededor de su eje longitudinal.
9. Un aparato de curvado como se establece en una cualquiera de las reivindicaciones anteriores, en el que el primer robot (18) industrial está configurado para realizar al menos una de las operaciones (1 )-(5) siguientes:
(1) hacer girar el tubo (17) de acero que es un tubo de acero soldado alrededor de su eje longitudinal, de manera que un cordón de soldadura del tubo (17) de acero esté en una posición que no interfiera con el curvado antes de colocar el tubo (17) de acero en el aparato (1) de curvado,
(2) ajustar un desplazamiento de un eje del tubo (17) de acero,
(3) ajustar una trayectoria de alimentación del tubo (17) de acero,
(4) aplicar repetidamente pequeñas vibraciones al tubo (17) de acero para reducir el coeficiente de fricción con el primer mecanismo (12) de soporte o el segundo mecanismo (15) de soporte, y
(5) ajustar un desplazamiento del eje del tubo (17) de acero con el fin de evitar la aparición de un fenómeno de adherencia-deslizamiento.
1. El uso del aparato de curvado de acuerdo con una cualquiera de las reivindicaciones anteriores para fabricar un elemento curvado a partir del tubo (17) de acero hueco.
Patentes similares o relacionadas:
Procedimiento para producir un estabilizador hueco, del 22 de Abril de 2020, de NHK SPRING CO.LTD.: Un procedimiento para fabricar un estabilizador hueco , que se proporciona en un vehículo y comprende: una porción de torsión (1a) que se extiende en la dirección […]
Procedimiento para la conformación por curvado por inducción de un tubo resistente a la presión con gran espesor de pared y gran diámetro y dispositivo curvador de tubos por inducción, del 5 de Junio de 2019, de AWS Schäfer Technologie GmbH: Procedimiento para la conformación por curvado por inducción de un tubo redondo resistente a la presión con gran espesor de pared y gran diámetro, en particular […]
Estabilizador y método para fabricar el estabilizador, del 11 de Abril de 2018, de NHK SPRING CO.LTD.: Un estabilizador para vehículos que comprende un miembro hueco, que comprende: una porción de torsión que se extiende en una […]
 Aparato de curvado, del 19 de Febrero de 2016, de NIPPON STEEL & SUMITOMO METAL CORPORATION: Un aparato de curvado que tiene el primer mecanismo de soporte descrito a continuación, un mecanismo de calentamiento , un mecanismo de enfriamiento , y […]
Aparato de curvado, del 19 de Febrero de 2016, de NIPPON STEEL & SUMITOMO METAL CORPORATION: Un aparato de curvado que tiene el primer mecanismo de soporte descrito a continuación, un mecanismo de calentamiento , un mecanismo de enfriamiento , y […]
 Dispositivo de curvado, del 2 de Julio de 2014, de NIPPON STEEL & SUMITOMO METAL CORPORATION: Un aparato de curvado que tiene un primer mecanismo de soporte , un mecanismo de calentamiento , un mecanismo de enfriamiento , un […]
Dispositivo de curvado, del 2 de Julio de 2014, de NIPPON STEEL & SUMITOMO METAL CORPORATION: Un aparato de curvado que tiene un primer mecanismo de soporte , un mecanismo de calentamiento , un mecanismo de enfriamiento , un […]
 Dispositivo y procedimiento para fabricar un elemento curvado, del 16 de Octubre de 2013, de NIPPON STEEL & SUMITOMO METAL CORPORATION: Un procedimiento de fabricación de un elemento curvado mediante la realización de la flexión de una pieza en bruto de metal hueca que tiene una sección […]
Dispositivo y procedimiento para fabricar un elemento curvado, del 16 de Octubre de 2013, de NIPPON STEEL & SUMITOMO METAL CORPORATION: Un procedimiento de fabricación de un elemento curvado mediante la realización de la flexión de una pieza en bruto de metal hueca que tiene una sección […]
 Pieza de partida de brazo y procedimiento de fabricación de la misma, del 14 de Agosto de 2013, de NIPPON STEEL & SUMITOMO METAL CORPORATION: Un material de brazo para una suspensión de automóvil que tiene un cuerpo (11a) fabricado a partir de unmaterial de piezas fabricado de metal, […]
Pieza de partida de brazo y procedimiento de fabricación de la misma, del 14 de Agosto de 2013, de NIPPON STEEL & SUMITOMO METAL CORPORATION: Un material de brazo para una suspensión de automóvil que tiene un cuerpo (11a) fabricado a partir de unmaterial de piezas fabricado de metal, […]