Dispositivo de control de potencia de vehículo.
Control de potencia de vehículo (70), que comprende:
una porción de soporte del acelerador (69);
~
un acelerador (30) montado de forma desplazable en la porción de soporte del acelerador (69) y que estáconfigurado para la manipulación y la operación por parte de un piloto;
un sensor (35) montado en uno del acelerador (30) y la porción de soporte del acelerador (69) en asociaciónsin contacto con uno del acelerador (30) y la porción de soporte del acelerador (69) distinto de aquel en el queel sensor (35) está montado, estando configurado el sensor (35) para detectar una posición del acelerador(30) respecto a la porción de soporte (69), en la asociación sin contacto, y generando una señal basada en laposición detectada para controlar la fuerza motriz de un vehículo, en el que el sensor (35) está configuradopara detectar una posición absoluta del acelerador (30) respecto a la porción de soporte del acelerador (69)sin requerir el movimiento relativo del acelerador (30) respecto a la porción de soporte del acelerador (69);un elemento magnético (28) que tiene un campo magnético y asociado con uno del acelerador (30) y laporción de soporte del acelerador (69) distinto de aquel en el que el sensor (35) está montado, en el que elsensor (35) está configurado para detectar el campo magnético para detectar la posición del acelerador (30) yel sensor (35) está configurado para detectar la orientación del campo magnético para detectar la posición delacelerador (30); y
un elemento de soporte (26) que soporta uno del elemento magnético y el sensor para mover dicho unorespecto al otro para orientar el campo magnético en el sensor en una orientación predeterminada cuando elacelerador (30) está en una posición predeterminada;
caracterizado porque el control de potencia también comprende:
un elemento de bloqueo configurado para bloquear el elemento de soporte (26) en dicha posiciónpredeterminada cuando dicha posición se obtiene para retener dicha orientación del elemento magnético(28) respecto al sensor (35) con el acelerador (30) en dicha posición predeterminada para calibrar elsensor (35); y
un elemento roscado (22) que tiene roscas y está fijado al acelerador (30), en el que:
el elemento de soporte (26) está en asociación roscada con el elemento roscado (22) de modo quepueda girar en el mismo, y el elemento de soporte (26) comprende una primera y segunda porcionesroscadas que son flexibles entre sí y que están en dicha asociación roscada; y
el elemento de bloqueo está configurado para flexionar la primera y segunda porciones flexibles entre sípara sujetarse a las roscas del elemento roscado (22) para bloquear rotativamente el elemento desoporte (26) respecto al elemento roscado (22).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2007/070980.
Solicitante: Vectrix International Limited.
Nacionalidad solicitante: China.
Dirección: 2/F Gold Peak Building, 30 Kwai Wing Road, Kwai Chung, New Territories Hong Kong CHINA.
Inventor/es: DUGAS,David, BLISS,Craig, HUGHES,Peter S.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B60L7/16 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60L PROPULSION DE VEHICULOS PROPULSADOS ELECTRICAMENTE (disposición o montaje de conjuntos de propulsión eléctrica o de varios motores principales diferentes para una propulsión recíproca o común sobre los vehículos B60K 1/00, B60K 6/20; disposición o montaje de la transmisión eléctrica en los vehículos B60K 17/12, B60K 17/14; prevención del patinado de las ruedas reduciendo la fuerza motriz en vehículos sobre raíles B61C 15/08; máquinas dinamoeléctricas H02K; control o regulación de motores H02P ); SUMINISTRO DE LA ENERGIA ELECTRICA AL EQUIPO AUXILIAR DE VEHICULOS PROPULSADOS ELECTRICAMENTE (circuitos eléctricos para el acoplamiento de vehículos B60D 1/64; calefacción eléctrica para vehículos B60H 1/00 ); SISTEMAS DE FRENOS ELECTRODINAMICOS PARA VEHICULOS, EN GENERAL (control o regulación de motores H02P ); SUSPENSION O LEVITACION MAGNETICAS PARA VEHICULOS; CONTROL DE LOS PARAMETROS DE FUNCIONAMIENTO SOBRE LOS VEHICULOS PROPULSADOS ELECTRICAMENTE; DISPOSITIVOS ELECTRICOS DE SEGURIDAD SOBRE VEHICULOS PROPULSADOS ELECTRICAMENTE. › B60L 7/00 Sistemas de frenos electrodinámicos para vehículos, en general. › para vehículos que tienen un transformador entre la fuente de energía y el motor.
- B62K23/04 B […] › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62K CICLOS; CUADROS PARA CICLOS; DISPOSITIVOS DE DIRECCION; MANDOS ACCIONADOS POR EL CONDUCTOR ADAPTADOS ESPECIALMENTE A LOS CICLOS; SUSPENSION DE CUBOS DE RUEDAS DE CICLOS; SIDECARS, REMOLQUES DELANTEROS O VEHICULOS ADICIONALES SIMILARES PARA CICLOS. › B62K 23/00 Parte inicial de mandos accionados por el conductor y adaptada especialmente a los ciclos, p. ej. palancas, mangos (adaptada especialmente a los mecanismos de frenado de ciclos B62L 3/00). › Mangos giratorios.
- G01D5/14 FISICA. › G01 METROLOGIA; ENSAYOS. › G01D MEDIDAS NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; DISPOSICIONES PARA LA MEDIDA DE DOS O MAS VARIABLES NO CUBIERTAS POR OTRA UNICA SUBCLASE; APARATOS CONTADORES DE TARIFA; DISPOSICIONES PARA TRANSFERENCIA O TRANSDUCTORES NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; MEDIDAS O ENSAYOS NO PREVISTOS EN OTRO LUGAR. › G01D 5/00 Medios mecánicos para la transferencia de la magnitud de salida de un elemento sensor; Medios para la conversión de la magnitud de salida de un elemento sensor en otra variable, en los que la forma o naturaleza del elemento sensor no determinan los medios de conversión; Transductores no especialmente adaptados a una variable específica (G01D 3/00 tiene prioridad; especialmente adaptados para aparatos que dan resultados distintos al valor instantáneo de una variable G01D 1/00). › que influyen en la magnitud de una corriente o voltaje.
PDF original: ES-2385104_T3.pdf
Fragmento de la descripción:
Dispositivo de control de potencia de vehículo Campo de la invención La presente invención se refiere en general a un control para la alimentación de un vehículo, y más particularmente, un control de potencia del vehículo sin contacto.
Antecedentes de la invención Son conocidos los vehículos con controles del acelerador que son mecánicos y eléctricos. Un ejemplo de un control del acelerador eléctrico está en la patente US No. 6, 581, 714, que describe un control de dirección de un transportador personal, donde el dispositivo de dirección utiliza un potenciómetro acoplado al manillar para generar un comando de dirección al girar. La patente US No. 6, 724, 165 divulga un vehículo que utiliza un potenciómetro como medios de producción del comando de control. En particular, el acelerador está acoplado a un potenciómetro, donde la rotación del acelerador desde la posición neutra en una dirección demanda la aceleración del vehículo, mientras que la rotación del acelerador en una segunda dirección demanda un frenado regenerativo.
Dependiendo del intervalo angular del dispositivo de accionamiento, tal como un acelerador, a menudo se utiliza una amplificación mecánica para asignar el dominio mecánico del dispositivo de accionamiento al dominio eléctrico del potenciómetro. Debido a la naturaleza del potenciómetro, la erosión del contacto también es posible. Controles del acelerador que se basan en el contacto entre una porción manipulable y un potenciómetro u otro dispositivo de detección de la posición del acelerador pueden tener una pobre retención de la calibración debido a la sensibilidad a las condiciones ambientales, y puede desgastar las conexiones mecánicas.
El documento EP 1 647 435 A1 se refiere a un control de potencia del vehículo, en el cual un imán permanente es desplazable respecto a un IC Hall digital y un IC Hall lineal. Un cambio de la señal del IC Hall digital desde un valor alto a un valor bajo libera un control en el que la potencia suministrada a un motor del vehículo se cambia en correspondencia a la salida de la IC Hall lineal.
El documento EP 1 553 277 se refiere a un dispositivo acelerador en el que un imán permanente gira junto a un mando del acelerador. El imán permanente está cerca de un primer sensor de efecto Hall cuando el mando del acelerador está en una posición inicial en la que una válvula de acelerador está totalmente cerrada, y está cerca de un segundo sensor de efecto Hall cuando el mando del acelerador está en una posición totalmente abierta. Las señales de los sensores Hall se comparan para detectar una anomalía.
El documento US 2005/0251301 A1 se refiere a un aparato de mando del acelerador en el que se fija un imán permanente a una porción de bloqueo de un mando del acelerador. Los campos magnéticos cambiantes generados por el imán permanente se detectan mediante un sensor de ángulo. La tensión de salida del sensor de ángulo se amplifica para controlar un motor, en el que el control de potencia se lleva a cabo basándose en el ángulo de rotación del mando del acelerador.
El documento US 2004/0107789 A1 describe un controlador del acelerador del manillar en el que se fija un imán a un elemento de sujeción y se proporciona un sensor de efecto Hall giratorio, que es sensible a un campo magnético generado por el imán. El imán está dispuesto en un extremo de un eje. De esta manera, el sensor es inherentemente menos susceptible a la desalineación.
Sigue existiendo una necesidad de tener un control del vehículo cuando el dispositivo de accionamiento está en asociación sin contacto con un dispositivo de detección, que puede permitir medios simples, duraderos y precisos de control del vehículo.
Sumario de la invención De acuerdo con la presente invención, se sugiere proporcionar un control de potencia de vehículo que tiene las características de la reivindicación independiente 1.
La presente invención se refiere a un control de potencia de vehículo que incluye una porción de soporte del acelerador, un acelerador montado de forma desplazable en la porción de soporte del acelerador y configurado para la manipulación y la operación de un piloto, y un sensor en asociación sin contacto con uno del acelerador y la porción de soporte del acelerador. El sensor está configurado para detectar una posición del acelerador respecto a la porción de soporte, en la asociación sin contacto, y generando una señal basada en la posición detectada para controlar la potencia motriz de un vehículo.
El sensor está configurado para detectar una posición absoluta del acelerador sin requerir ningún movimiento del acelerador, tal como en el encendido del sensor. El sistema de control de la potencia del vehículo también incluye un elemento magnético que tiene un campo magnético y se asocia con al menos uno del acelerador y la porción de soporte del acelerador. En esta disposición, el sensor está configurado para detectar el campo magnético para detectar la posición del acelerador. Sin embargo, el sensor está configurado para detectar la orientación del campo magnético para detectar la posición del acelerador.
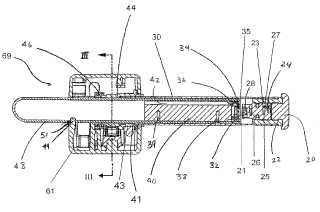
El sistema de control de potencia del vehículo también incluye un elemento de soporte para soportar uno del elemento magnético y el sensor y para mover dicho uno respecto al otro para orientar el campo magnético en una orientación predeterminada cuando el acelerador está en una posición predeterminada. Este elemento de soporte incluye un elemento de bloqueo configurado para bloquear el elemento de soporte en una posición predeterminada. Cuando se obtiene una posición predeterminada, el elemento de bloqueo mantiene la orientación del elemento magnético respecto al sensor y con el acelerador en una posición predeterminada para la calibración del sensor. El sistema de control de potencia también incluye un elemento roscado que tiene roscas y fijado al acelerador, de tal manera que el elemento de soporte está en asociación roscada con el elemento roscado. El elemento de soporte incluye una primera y segunda porciones roscadas que son flexibles entre sí y que están en una asociación roscada con el elemento roscado. El elemento de bloqueo está configurado para flexionar la primera y segunda porciones flexibles entre sí para sujetar las roscas del elemento roscado para bloquear giratoriamente el elemento de soporte respecto al acelerador. Una característica ventajosa del elemento de bloqueo es un sujetador que está configurado para fijar el elemento de bloqueo por empuje separando la primera y segunda porciones flexibles entre sí.
El elemento magnético generalmente tiene polos magnéticos, de manera que el campo magnético en el sensor cambia la orientación cuando el acelerador se mueve. Como el acelerador es giratorio alrededor de un eje, una disposición conveniente es que los polos magnéticos estén dispuestos en diferentes posiciones radiales y circunferenciales respecto al eje, tal como en diferentes ubicaciones excéntricas. Convenientemente, el elemento magnético puede ser o incluir un imán permanente.
En otra realización, el sensor incluye al menos un sensor de efecto Hall. Preferiblemente, el sensor incluye un sensor de efecto Hall diferencial, tal como un sensor de efecto Hall diferencial configurado para detectar una orientación absoluta del campo magnético sin requerir el movimiento del acelerador. La señal desde el sensor puede ser una señal modulada por anchura de pulsos, en la que la anchura de los pulsos se relaciona con la posición detectada.
El acelerador también puede incluir además un conjunto de empuje del acelerador para empujar elásticamente el acelerador hacia una posición neutra respecto al sensor. Este conjunto de empuje está configurado para aplicar un empuje menor al acelerador hacia la posición neutra cuando el acelerador se desplaza desde la posición neutra en un primer lado neutro que cuando el acelerador se desplaza desde la posición neutra a un segundo lado neutro. Preferiblemente, la colocación del acelerador en el primer lado hace que el motor del vehículo proporcione una aceleración de potencia de propulsión hacia delante, y la colocación del acelerador en el segundo lado activa el frenado regenerativo o la potencia propulsora inversa desde el motor.
El conjunto de empuje generalmente incluye un primer elemento de empuje configurado para empujar el acelerador en una primera dirección desde el primer lado hacia el neutro, y un segundo elemento de empuje configurado para empujar el acelerador en una segunda dirección, opuesta a... [Seguir leyendo]
Reivindicaciones:
1. Control de potencia de vehículo (70) , que comprende:
una porción de soporte del acelerador (69) ; un acelerador (30) montado de forma desplazable en la porción de soporte del acelerador (69) y que está configurado para la manipulación y la operación por parte de un piloto; un sensor (35) montado en uno del acelerador (30) y la porción de soporte del acelerador (69) en asociación sin contacto con uno del acelerador (30) y la porción de soporte del acelerador (69) distinto de aquel en el que el sensor (35) está montado, estando configurado el sensor (35) para detectar una posición del acelerador (30) respecto a la porción de soporte (69) , en la asociación sin contacto, y generando una señal basada en la posición detectada para controlar la fuerza motriz de un vehículo, en el que el sensor (35) está configurado para detectar una posición absoluta del acelerador (30) respecto a la porción de soporte del acelerador (69) sin requerir el movimiento relativo del acelerador (30) respecto a la porción de soporte del acelerador (69) ; un elemento magnético (28) que tiene un campo magnético y asociado con uno del acelerador (30) y la porción de soporte del acelerador (69) distinto de aquel en el que el sensor (35) está montado, en el que el sensor (35) está configurado para detectar el campo magnético para detectar la posición del acelerador (30) y el sensor (35) está configurado para detectar la orientación del campo magnético para detectar la posición del acelerador (30) ; y un elemento de soporte (26) que soporta uno del elemento magnético y el sensor para mover dicho uno respecto al otro para orientar el campo magnético en el sensor en una orientación predeterminada cuando el acelerador (30) está en una posición predeterminada; caracterizado porque el control de potencia también comprende:
un elemento de bloqueo configurado para bloquear el elemento de soporte (26) en dicha posición predeterminada cuando dicha posición se obtiene para retener dicha orientación del elemento magnético (28) respecto al sensor (35) con el acelerador (30) en dicha posición predeterminada para calibrar el sensor (35) ; y un elemento roscado (22) que tiene roscas y está fijado al acelerador (30) , en el que: el elemento de soporte (26) está en asociación roscada con el elemento roscado (22) de modo que pueda girar en el mismo, y el elemento de soporte (26) comprende una primera y segunda porciones roscadas que son flexibles entre sí y que están en dicha asociación roscada; y el elemento de bloqueo está configurado para flexionar la primera y segunda porciones flexibles entre sí para sujetarse a las roscas del elemento roscado (22) para bloquear rotativamente el elemento de soporte (26) respecto al elemento roscado (22) .
2. Control de potencia según la reivindicación 1, en el que:
el acelerador (30) es giratorio alrededor de un eje (71) ; el elemento magnético (28) tiene polos magnéticos dispuestos en diferentes posiciones radiales y circunferenciales respecto al eje (71) , de modo que el campo magnético en el sensor cambia la orientación cuando el acelerador se mueve.
3. Control de potencia según la reivindicación 2, en el que el sensor (35) comprende un sensor de efecto Hall diferencial configurado para detectar una orientación absoluta del campo magnético sin requerir el movimiento relativo del acelerador (30) respecto a la porción de soporte del acelerador (69) .
4. Control de potencia según cualquiera de las reivindicaciones anteriores, en el que la señal es una señal modulada por ancho de pulsos en el que el ancho de pulsos se relaciona con la posición detectada.
5. Control de potencia según cualquiera de las reivindicaciones anteriores, que también comprende un elemento de presión del acelerador (55) para empujar elásticamente el acelerador (30) hacia una posición neutra respecto al sensor (35) , estando configurado el conjunto de empuje para aplicar un empuje menor al acelerador (30) hacia la posición neutra cuando el acelerador (30) se desplaza desde la posición neutra en uno primer lado del mismo que cuando el acelerador se desplaza desde la posición neutra a un segundo lado del mismo.
6. Control de potencia según la reivindicación 5, en el que la rotación del acelerador (30) desde la posición neutra en el primer lado demanda aceleración, y la rotación al segundo lado demanda frenado regenerativo o potencia inversa.
7. Control de potencia según las reivindicaciones 5 ó 6, en el que el conjunto de empuje comprende:
un primer elemento de empuje (44, 46) configurado para empujar el acelerador (30) en una primera dirección desde el primer lado hacia el neutro, y un segundo elemento de empuje (50, 52) configurado para empujar el acelerador (30) en una segunda dirección, opuesta a la primera dirección, para proporcionar el mayor empuje cuando el acelerador está en el segundo lado que en el primer lado.
8. Control de potencia según cualquiera de las reivindicaciones 5 a 7, en el que el conjunto de empuje está configurado de tal manera que:
un primer elemento de empuje (44, 46) está en asociación de empuje con el acelerador (30) cuando el acelerador está el primer y segundo lados; y un segundo elemento de empuje (50, 52) está en asociación de empuje del acelerador (30) cuando el acelerador está en el segundo lado y se desacopla del acelerador cuando el acelerador está en el primer lado.
9. Control de potencia según cualquiera de las reivindicaciones anteriores, en el que el sensor (35) está montado en la porción de soporte del acelerador (69) y está en asociación sin contacto con el acelerador (30) .
10. Vehículo (130) , que comprende:
el control de potencia de vehículo (70) según cualquiera de las reivindicaciones anteriores; un motor (100) configurado para proporcionar fuerza motriz al vehículo; un controlador (118) conectado para recibir la señal desde el sensor (35) y para hacer que el motor (100) funcione a un nivel de potencia en función de la posición del acelerador (30) ; y un manillar (48) configurado para dirigir el vehículo, en el que el sensor (35) está asociado con el manillar (48) , y el acelerador (30) es un acelerador de giro montado en el manillar (48) de manera que se puede sujetar por un usuario para operar el acelerador y dirigir el manillar.
Patentes similares o relacionadas:
 Sistema y método de calibración de la longitud del trayecto, del 29 de Julio de 2020, de Thermo Electron Scientific Instruments LLC: Aparato para medir una propiedad óptica de una muestra, el aparato que comprende:
a. un brazo oscilante ;
b. una fuente de luz;
c. una primera superficie […]
Sistema y método de calibración de la longitud del trayecto, del 29 de Julio de 2020, de Thermo Electron Scientific Instruments LLC: Aparato para medir una propiedad óptica de una muestra, el aparato que comprende:
a. un brazo oscilante ;
b. una fuente de luz;
c. una primera superficie […]
Procedimiento para el monitoreo del transporte de recipientes de líquidos en un dispositivo de análisis automático, del 15 de Julio de 2020, de SIEMENS HEALTHCARE DIAGNOSTICS PRODUCTS GMBH: Procedimiento para el monitoreo del transporte de un recipiente de líquido con una pinza de sujeción pasiva fijada a un brazo de transferencia […]
Codificador giratorio, del 22 de Abril de 2020, de CMR Surgical Limited: Un codificador de posición para detectar la posición giratoria relativa de la primera y segunda partes alrededor de un eje de rotación, […]
Sistemas y métodos de conmutación de salida para sensores de campo magnético, del 11 de Marzo de 2020, de INFINEON TECHNOLOGIES AG: Un sensor, que comprende: un elemento sensor; y una circuitería del sensor acoplada al elemento sensor, el elemento sensor configurado para detectar […]
 Dispositivo de detección de posición relativa, sensor de posición del acelerador y vehículo, del 29 de Enero de 2020, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Un dispositivo de detección de posición relativa que comprende una parte de imán permanente y un sensor magnético que están dispuestos para ser desplazables […]
Dispositivo de detección de posición relativa, sensor de posición del acelerador y vehículo, del 29 de Enero de 2020, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Un dispositivo de detección de posición relativa que comprende una parte de imán permanente y un sensor magnético que están dispuestos para ser desplazables […]
Procedimiento y aparato para codificación magnética seccional de un eje y para medición de ángulo de rotación, velocidad de rotación y par, del 22 de Enero de 2020, de GENERAL ELECTRIC COMPANY: Sistema que comprende un eje codificado magnéticamente y un sistema de detección de campo magnético, caracterizado por el hecho de […]
Cuentarrevoluciones magnético para la autodetección de estados de error al determinar el número de revoluciones detectables con este cuentarrevoluciones, del 23 de Octubre de 2019, de Leibniz-Institut für Photonische Technologien e.V: Cuentarrevoluciones magnético o contador de desplazamiento para la autodetección de estados de error al determinar números de revoluciones o números de desplazamientos […]
Recopilación y/o procesamiento de datos de múltiples sensores, del 4 de Septiembre de 2019, de QUALCOMM INCORPORATED: Un procedimiento, que comprende: detectar el movimiento de un dispositivo en respuesta a la recepción de una señal desde un acelerómetro […]