Dispositivo de control y sistema de graduación de un vehículo automóvil.
Sistema de graduación de un vehículo automóvil que comprende
- un accionamiento para graduar una parte graduable,
- un excitador que está unido con el accionamiento para la alimentación de corriente a dicho accionamiento,
- un sensor para medir la velocidad real del accionamiento,
- y una unidad de cálculo que está unida con el excitador y con el sensor y preparada para
- regular un movimiento de graduación de una parte graduable,
- determinar, para la regulación, una velocidad nominal, medir una velocidad real y comparar la velocidad real con la velocidad nominal,
- medir al menos una magnitud que se correlaciona con el estado del sistema de graduación por medio de un sensor del entorno,
- adaptar la velocidad nominal en dependencia de la magnitud medida o de las magnitudes medidas de tal manera que quede siempre una reserva de regulación.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E10011961.
Solicitante: BROSE SCHLIESSSYSTEME GMBH & CO. KG.
Nacionalidad solicitante: Alemania.
Dirección: Otto-Hahn-Straße 34 42369 Wuppertal ALEMANIA.
Inventor/es: DUNNE, KLAUS, EGGELING,JÜRGEN, PLATZKÖSTER,ANDREAS.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- E05F15/00 CONSTRUCCIONES FIJAS. › E05 CERRADURAS; LLAVES; ACCESORIOS DE PUERTAS O VENTANAS; CAJAS FUERTES. › E05F DISPOSITIVOS PARA DESPLAZAR LOS BATIENTES DE LA POSICION ABIERTA A LA CERRADA O VICEVERSA; FRENOS PARA BATIENTES; APARELLAJE PARA BATIENTES NO PREVISTOS EN OTRA PARTE, RELATIVOS AL FUNCIONAMIENTO DEL BATIENTE. › Mecanismos para batientes movidos por una fuerza motriz (accesorios de cerraduras accionados por una fuerza motriz para completar el cierre o iniciar la apertura de un batiente E05B 17/00).
PDF original: ES-2509498_T3.pdf
Fragmento de la descripción:
Dispositivo de control y sistema de graduación de un vehículo automóvil.
La invención concierne a un dispositivo de control y un sistema de graduación de un vehículo automóvil.
Se conoce por el documento DE 37 36 400 A1 un accionamiento de graduación. En éste se realización una reducción del número de revoluciones o de la velocidad del accionamiento para materializar una característica elástica prefijada en rangos de graduación determinados a fin de rebajar la energía cinemática. La parte móvil es movida por medio de un motor de accionamiento hasta una posición de cierre a lo largo de una zona de atrapamiento amenazada en la que pueden quedar atrapados cuerpos extraños entre la parte móvil y una parte en reposo. A causa del retardo inevitable en el procesamiento de señales y de la inercia de la parte mecánicamente movida, el cuerpo extraño puede quedar atrapado entre la parte móvil y la parte en reposo a pesar de un dispositivo de seguridad que represente una protección contra atrapamiento.
Para evitar esto se ha propuesto en el documento DE 37 36 400 A1 que se reduzca la velocidad de graduación al cerrar la parte móvil en la zona de atrapamiento amenazada. La protección contra atrapamiento propiamente dicha puede detener entonces momentáneamente, en su caso, la parte móvil y puede eventualmente invertir la dirección de movimiento (reversión). En este accionamiento de graduación conocido la reducción de la velocidad se efectúa en escalones, es decir que se conmuta, en un paso, de un escalón alto a un escalón bajo de la velocidad de cierre.
En el documento DE 196 18 484 A1 se revela un accionamiento de graduación con protección contra atrapamiento que presenta una transición continua de una velocidad de cierre alta a una velocidad de cierre baja determinada. Dentro de una zona prefijada antes de alcanzar la posición "cerrada" se reduce el número de revoluciones o la potencia del accionamiento según una relación funcional prefijada, de modo que la disminución hasta un número de revoluciones mínimo o una potencia mínima se efectúa dentro de una zona de posición determinada. El número de revoluciones mínimo o la velocidad mínima se alcanza en una posición antes de la posición "cerrada". En este caso, el número de revoluciones mínimo o la potencia mínima es sustancialmente constante. La disminución del número de revoluciones o de la potencia del accionamiento se produce linealmente o según una función exponencial.
La disminución se produce en el documento DE 196 18 484 A1 según una relación funcional prefijada hasta el número de revoluciones mínimo o la potencia mínima a lo largo de una zona de posición constante, variándose la velocidad de disminución en dependencia de la potencia de suministro actual. O bien la disminución hasta el número de revoluciones mínimo o la potencia mínima se produce a lo largo de una zona de posición variable, variándose su punto de partida en dependencia de la respectiva potencia de suministro actual. El número de revoluciones mínimo o la potencia mínima necesarios se determina aquí empíricamente de tal manera que en todas las condiciones, como especialmente temperatura y humedad, estén aún garantizadas fuerzas de cierre suficientemente altas.
El control del número de revoluciones o de la potencia del accionamiento eléctrico se efectúa en el documento DE 196 18 484 A1 por medio de componentes semiconductores, como reguladores lineales o reguladores de cadencia con una relación impulso-pausa variable. El accionamiento de graduación puede utilizarse juntamente con un circuito para la protección contra atrapamiento de cuerpos extraños entre una parte movida y un tope fijo en la posición "cerrada". En el cálculo de la disminución del número de revoluciones por efecto de procesos de atrapamiento se tiene en cuenta como factor de corrección la respectiva pendiente conocida de la disminución según una relación funcional prefijada de número de revoluciones o potencia del accionamiento. Se ha previsto para la corrección una memoria adaptativa en la que está almacenada como insignificante pesadez de marcha la disminución controlada del número de revoluciones o la potencia.
En el documento DE 199 01 840 A1 se revela una regulación de número de revoluciones con regulación de corriente eléctrica pospuesta. La regulación de corriente eléctrica lleva asociada una limitación de corriente eléctrica cuyo valor de corriente eléctrica máximo se varía en dependencia de la posición de la regulación.
La invención se basa en el problema de indicar un dispositivo de control o un sistema de graduación tal que se mejore lo más ópticamente posible el movimiento de graduación visible para el usuario.
Este problema se resuelve mediante el dispositivo de control con las características de la reivindicación 15 o mediante un sistema de graduación con las características de la reivindicación 1. Perfeccionamientos ventajosos de la invención son objeto de reivindicaciones subordinadas.
Como consecuencia, se ha previsto un dispositivo de control para el funcionamiento de un sistema de graduación de un vehículo automóvil, especialmente un portón trasero. Este dispositivo de control presenta una unidad de cálculo que está equipada con funciones para controlar el sistema de graduación. Estas funciones pueden materializarse por hardware o por un desarrollo de programa implementado. Asimismo, el problema se resuelve mediante un sistema de graduación con una unidad de cálculo de esta clase, cuyas funciones se implementan también de manera correspondiente.
El sistema de graduación presenta un accionamiento para graduar una parte graduable, un excitador, que está unido con el accionamiento para la alimentación de corriente a dicho accionamiento, y un sensor para medir una velocidad real del accionamiento. El accionamiento, el excitador y el sensor son aquí preferiblemente parte de un circuito de mando eléctrico del dispositivo de control. Asimismo, la unidad de cálculo está unida con el excitador y con el
sensor.
Según una variante de la invención, la unidad de cálculo está preparada para materializar las funciones de
- regular un movimiento de graduación de una parte graduable,
- comparar, a fines de regulación, la velocidad real con una velocidad nominal,
- determinar la velocidad nominal de una posición de partida a una posición de destino mediante una función nominal con una serie de fases de graduación con velocidad nominal diferente o con evolución diferente de la
velocidad nominal, y
- determinar la velocidad nominal o la evolución de la velocidad nominal dentro de al menos una fase de graduación en dependencia de la posición de partida y/o la posición de destino.
Para las funciones puede utilizarse, por ejemplo, un procedimiento de funcionamiento de un sistema de graduación que esté implementado por procesos de conexión de un hardware (ROM, FPGA) o por un software en la unidad de
cálculo.
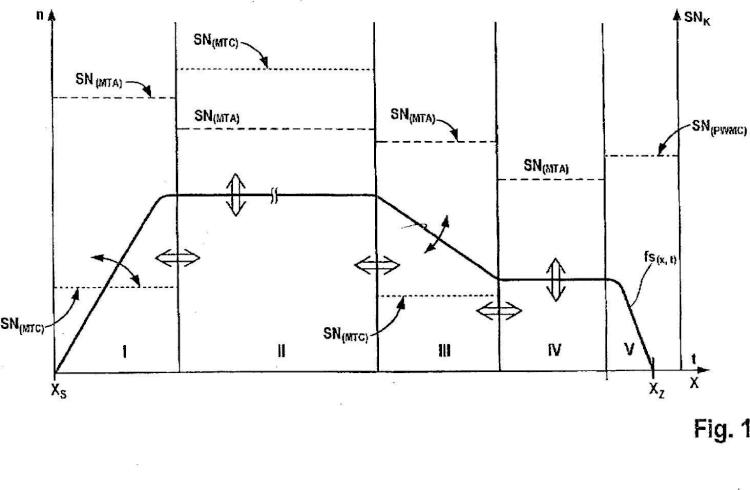
La parte graduable es, por ejemplo, un portón trasero que puede ser graduado a motor por el accionamiento. Para regular el movimiento de graduación de la parte graduable se implementa preferiblemente un regulador con comportamiento integral (regulador Pl, regulador PID). El regulador presenta aquí al menos un bucle de regulación dentro del cual se mide la velocidad real y se prefija una velocidad nominal. La velocidad real es aquí una función que depende de la posición de partida y la posición de destino de cada movimiento de graduación. Si la posición de graduación comienza, por ejemplo, en el centro del recorrido de graduación, la función de la velocidad nominal depende de esta posición de partida en el centro y de la posición de destino previsible - por ejemplo, una posición cerrada o una posición completamente abierta - de conformidad con la dirección de graduación seleccionada. Para posibles recorridos de graduación cortos se prevé, por ejemplo, una función nominal con pequeña velocidad nominal. Asimismo, es posible variar adicionalmente una aceleración y/o un frenado como evolución de la velocidad nominal en la función nominal en dependencia de la posición de partida y/o la posición de destino. Fases de graduación distintas de la función nominal presentan aquí evoluciones diferentes, estando previstas, por ejemplo, al menos una fase de graduación para la aceleración y al menos una fase de graduación para el frenado.
Según una ejecución ventajosa de la invención, se ha previsto que la evolución de la velocidad nominal dependa de la posición de graduación y/o del tiempo de graduación. Por ejemplo, se pueden ajustar una fase de aceleración a medio segundo y una fase de frenado... [Seguir leyendo]
Reivindicaciones:
1. Sistema de graduación de un vehículo automóvil que comprende
- un accionamiento para graduar una parte graduable,
- un excitador que está unido con el accionamiento para la alimentación de corriente a dicho accionamiento,
- un sensor para medir la velocidad real del accionamiento,
- y una unidad de cálculo que está unida con el excitador y con el sensor y preparada para
- regular un movimiento de graduación de una parte graduable,
- determinar, para la regulación, una velocidad nominal, medir una velocidad real y comparar la velocidad real con la velocidad nominal,
- medir al menos una magnitud que se correlaciona con el estado del sistema de graduación por medio de un sensor
del entorno,
- adaptar la velocidad nominal en dependencia de la magnitud medida o de las magnitudes medidas de tal manera que quede siempre una reserva de regulación.
2. Sistema de graduación según la reivindicación 1, en el que la unidad de cálculo está preparada de modo que se establezca a partir de la respectiva magnitud medida un parámetro de corrección individual para la velocidad nominal, preferiblemente en el que la unidad de cálculo esté preparada de modo que se midan varias magnitudes que sirven de fundamento a la adaptación de la velocidad nominal y se establezca a partir de los parámetros de corrección individuales establecidos un parámetro de corrección total para la velocidad nominal.
3. Sistema de graduación según la reivindicación 1 ó 2, en el que la unidad de cálculo está preparada de modo que se mida como magnitud que sirve de fundamento a la adaptación de la velocidad nominal la temperatura actual del sistema de graduación y/o del entorno del sistema de graduación, preferiblemente de modo que el factor de corrección individual establecido a partir de la temperatura medida descienda por encima de una temperatura límite superior y por debajo de una temperatura límite inferior, y/o en el que la unidad de cálculo está preparada de modo que se mida como magnitud que sirve de fundamento a la adaptación de la velocidad nominal la tensión de suministro actual del vehículo automóvil, preferiblemente de modo que el factor de corrección individual establecido a partir de la tensión de suministro medida varíe linealmente con la tensión de suministro, y/o en el que la unidad de cálculo está preparada de modo que se mida como magnitud que sirve de fundamento a la adaptación de la velocidad nominal la posición en cuesta del vehículo automóvil, preferiblemente de modo que el factor de corrección individual establecido a partir de la posición en cuesta medida varíe linealmente con la tensión de suministro.
4. Sistema de graduación según cualquiera de las reivindicaciones anteriores, en el que la unidad de cálculo está preparada de modo que se establezca durante la regulación un caso de atrapamiento en dependencia de una magnitud de medida dependiente del movimiento de graduación, preferiblemente de la velocidad real, y/o de una magnitud de regulación del sistema de regulación.
5. Sistema de graduación según cualquiera de las reivindicaciones anteriores en el que la unidad de cálculo está preparada
- para determinar la velocidad nominal de una posición de partida a una posición de destino mediante una función nominal con una serie de fases de graduación con velocidad nominal diferente o con una evolución diferente de la velocidad nominal, y
- determinar la velocidad nominal o la evolución de la velocidad nominal dentro de al menos una fase de graduación en dependencia de la posición de partida y/o la posición de destino.
6. Sistema de graduación según la reivindicación 5, en el que la función nominal presenta
- una fase de aceleración,
- una fase de marcha sincrónica adyacente a la fase de aceleración,
- una fase de frenado adyacente a la fase de marcha sincrónica y
- una fase de marcha lenta adyacente a la fase de frenado.
7. Sistema de graduación según cualquiera de las reivindicaciones anteriores, en el que la unidad de cálculo está preparada para determinar la velocidad nominal de al menos una fase de graduación y/o la evolución de la velocidad
nominal de al menos una fase de graduación y/o la función nominal en dependencia de una magnitud que se correlaciona con el estado del sistema de graduación, especialmente una temperatura actual del sistema de graduación, una tensión de suministro, una duración de graduación o una detección de una posición en cuesta del vehículo automóvil.
8. Sistema de graduación según cualquiera de las reivindicaciones anteriores, que comprende una mecánica con un sistema muelle-masa que tiene tendencia a oscilar, estando preparada la unidad de cálculo para
- determinar la velocidad nominal de una posición de partida a una posición de destino mediante una función nominal con una serie de fases de graduación,
- determinar dentro de una fase de frenado como fase de graduación la función nominal como función descendente hacia una velocidad nominal mínima (como parte de la función nominal), y
- determinar la función descendente de la fase de frenado en dependencia del sistema muelle-masa y de una velocidad nominal al comienzo de la fase de frenado de tal manera que se amortigüe por la función descendente de la fase de frenado una sobreoscilación del sistema muelle-masa para que la velocidad real alcance la velocidad mínima antes de la posición de destino,
y en el que preferiblemente la unidad de cálculo está preparada para determinar la pendiente de la función de la fase de frenado en dependencia de la velocidad nominal al comienzo de la fase de frenado de modo que una pendiente de la función sea más pequeña para una velocidad nominal mayor y una pendiente de la función sea más grande para una velocidad nominal menor.
9. Sistema de graduación según cualquiera de las reivindicaciones anteriores, que comprende una mecánica con un sistema muelle-masa que tiene tendencia a oscilar, estando preparada la unidad de cálculo para
- determinar la velocidad nominal de una posición de partida a una posición de destino mediante una función nominal con una serie de fases de graduación,
- determinar dentro de una fase de aceleración como fase de graduación la fase nominal como función ascendente hacia una velocidad de marcha sincrónica,
- determinar la función ascendente de la fase de aceleración en dependencia del sistema muelle-masa y de una velocidad nominal al comienzo de la fase de aceleración de tal manera que se amortigüe por la función ascendente de la fase de aceleración la sobreoscilación del sistema muelle-masa para que preferiblemente no se puedan percibir por el ojo las oscilaciones de la parte graduable.
10. Sistema de graduación según cualquiera de las reivindicaciones anteriores, en el que la unidad de cálculo está preparada para
- determinar la velocidad nominal de una posición de partida a una posición de destino mediante una función nominal con una serie de fases de graduación,
- establecer un caso de atrapamiento durante la regulación en dependencia de una magnitud de medida dependiente del movimiento de graduación y/o de una magnitud de regulación del sistema de regulación,
en el que
- la unidad de cálculo presenta al menos dos algoritmos para establecer el caso de atrapamiento,
la unidad de cálculo está preparada para fijar como más sensible uno de los al menos dos algoritmos dentro de al menos una fase de graduación,
preferiblemente de modo que en el sistema de graduación
- los al menos dos algoritmos presentan dentro de al menos una fase de graduación una selectividad diferente entre una fuerza de atrapamiento y una fuerza perturbadora,
la unidad de cálculo está preparada para fijar como más insensible aquél de los algoritmos que tiene la selectividad más pequeña en proporción al algoritmo que tiene la selectividad más grande.
11. Sistema de graduación según la reivindicación 10, en el que, para la fijación de la insensibilidad, la unidad de cálculo está preparada para desactivar el algoritmo que tiene la sensibilidad más pequeña dentro de la respectiva fase de graduación.
12. Sistema de graduación según la reivindicación 10 u 11, en el que la unidad de cálculo está preparada para fijar el
algoritmo como más Insensible en dependencia de al menos una posición de graduación.
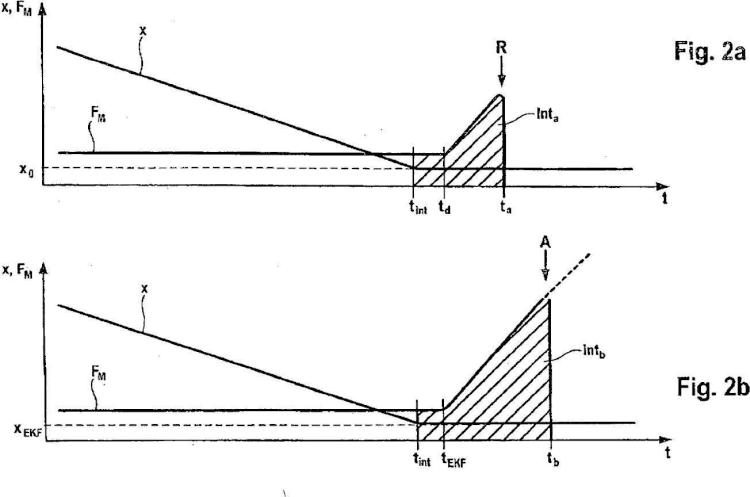
13. Sistema de graduación según cualquiera de las reivindicaciones anteriores, en el que la unidad de cálculo está preparada para
- comparar la velocidad real con una velocidad umbral,
- integrar una magnitud de reglaje del sistema de regulación cuando la velocidad real cae por debajo de la velocidad
umbral, estando asociada la magnitud de reglaje a una potencia alimentada al motor,
- parar el motor o invertir una dirección de graduación cuando la integral de la magnitud de reglaje sobrepase un valor umbral Integral.
14. Sistema de graduación según la reivindicación 13, en el que la unidad de cálculo está preparada para variarla 10 velocidad umbral en dependencia de una magnitud que se correlaciona con el estado del sistema de graduación,
especialmente una temperatura, una tensión de suministro, una rigidez de muelle de una mecánica de graduación del sistema de graduación o una velocidad nominal.
15. Dispositivo de control para el funcionamiento de un sistema de graduación según cualquiera de las reivindicaciones anteriores, que comprende una unidad de cálculo que está unida con el excitador y con el sensor y
preparada para
- regular un movimiento de graduación de una parte graduable,
- determinar, para la regulación, una velocidad nominal, medir una velocidad real y comparar la velocidad real con la velocidad nominal,
- medir por medio de un sensor del entorno al menos una magnitud que se correlaciona con el estado del sistema de
graduación,
- adaptar la velocidad nominal en dependencia de la magnitud medida o de las magnitudes medidas de tal manera que quede siempre una reserva de regulación.
Patentes similares o relacionadas:
Dispositivo de cierre electrónico, del 21 de Agosto de 2019, de dormakaba Schweiz AG: Dispositivo de cierre electrónico con una unidad receptora para recibir una señal de autorización de un medio de acceso y un actuador para el acoplamiento o la liberación opcionales […]
Sensor antipinzamiento para un elemento de cierre de un vehículo de motor, del 3 de Julio de 2019, de Cooper Standard GmbH: Sensor antipinzamiento para un elemento de cierre de un vehículo de motor que se puede mover entre una posición de apertura y una posición […]
Borde de cierre para puerta giratoria interior, puerta giratoria interior y medio de transporte de pasajeros, del 24 de Junio de 2019, de GUMMI-WELZ GMBH U. CO. KG GUMMI-KUNSTSTOFFTECHNIK-SCHAUMSTOFFE: Borde de cierre para una puerta giratoria interior de un medio de transporte de pasajeros, en donde el borde de cierre comprende una pared y al menos […]
Procedimiento y dispositivo para monitorizar al menos un contacto de conmutación electrónico para un vehículo, del 5 de Junio de 2019, de KNORR-BREMSE GESELLSCHAFT MIT BESCHRANKTER HAFTUNG: Procedimiento para monitorizar al menos un contacto de conmutación electrónico para un vehículo , donde el contacto de conmutación (112, 114; […]
Accionamiento para movimiento traslacional o giratorio de cargas, del 29 de Mayo de 2019, de Tousek Ges M.B.H: Accionamiento para movimiento traslacional o giratorio de cargas, tales como portales correderos, puertas y portales giratorios, portales elevables, barreras, […]
Dispositivo de seguridad, del 17 de Mayo de 2019, de Alpha Deuren International BV: Dispositivo de seguridad para una hoja movible de una puerta, en particular una puerta seccional, que se mueve entre una posición abierta […]
Disposición de conmutación, del 12 de Marzo de 2019, de GUMMI-WELZ GMBH U. CO. KG GUMMI-KUNSTSTOFFTECHNIK-SCHAUMSTOFFE: Disposición de conmutación que comprende una yuxtaposición de un cierto número de elementos de conmutación que, en posición de reposo, […]
Junta para puerta, puerta y vehículo equipados con la misma, del 20 de Febrero de 2019, de Faiveley Transport Tours: Junta macho delantera para una puerta, comprendiendo la junta: - un cuerpo de junta que integra una cámara : - de la que una pared (7a) sobresale […]