Dispositivo de control de la dirección para un vehículo y método de control de la dirección.
Método para controlar un dispositivo de dirección con medios de potencia de dirección asistida (7,
8, 9) para un vehículo motorizado, con al menos una rueda (4) que gire, comprendiendo el dispositivo de dirección: un eje (1) de dirección con un primer extremo para adoptar un volante (2),
un dispositivo (10) de control que controla dichos medios de potencia asistida (7, 8, 9),
medios sensores (11) que detectan el par del eje de dirección, introducido en dicho eje (4) de dirección,
medios para determinar una situación sin manos, en la cual el conductor no introduce ningún par en dicho eje (1) de dirección,
donde los medios de potencia de dirección asistida (7, 8, 9) apoyan al conductor sobre la base de la demanda del conductor introducida en el eje (1) de dirección,
donde el método comprende los pasos de:
determinar un par (M) del volante sobre la base del par del eje de dirección determinar una derivada con respecto al tiempo (∂M/∂t) del par (M) detectado en el volante;
estando además caracterizado el método por los pasos siguientes:
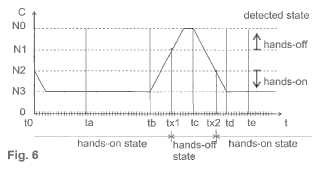
si el valor absoluto del par (M) del volante es inferior a un límite umbral (ε1) del par, y si el valor absoluto de la derivada, (∂M/∂t), del par del volante es inferior a un límite umbral (ε2) de la derivada del par, un contador (C) aumenta en una unidad,
si el valor absoluto del par (M) del volante es mayor o igual a un límite umbral (ε1) del par, y/o si el valor absoluto de la derivada, (∂M/∂t), del par del volante es mayor o igual a un límite umbral (ε2) de la derivada del par, dicho contador (C) disminuye en una unidad,
si dicho contador (C) tiene un valor igual o mayor que un límite umbral (N1) de la cuenta, se determina el estado sin manos.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E10008377.
Solicitante: THYSSENKRUPP PRESTA AG.
Nacionalidad solicitante: Liechtensein.
Dirección: Essanestrasse 9492 Eschen LIECHTENSTEIN.
Inventor/es: BENYO,IRME, KUSLITS,MÁRTON, SZÜCS,SÁNDOR.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B62D5/04 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › B62D 5/00 Dirección asistida o de relé de potencia (para ruedas no orientables B62D 11/00; servomotores de fluido bajo presión en general F15B). › eléctrica, p. ej. utilizando un servomotor eléctrico conectado o que forma parte del mecanismo de dirección.
PDF original: ES-2401034_T3.pdf
Fragmento de la descripción:
Dispositivo de control de la dirección para un vehículo y método de control de la dirección La invención concierne a un método para controlar un dispositivo de dirección con medios de soporte de la dirección asistida para un vehículo motorizado, con al menos una rueda direccional, donde el dispositivo de dirección comprende:
- un eje de dirección con un primer extremo que adopta un volante,
- un dispositivo de control que controla dichos medios de potencia asistida,
- medios detectores que detectan el par del eje de dirección aplicado a dicho eje de dirección,
-medios para determinar una situación sin manos en la cual el conductor no aplica un par a dicho eje de dirección,
donde el medio de soporte de la dirección asistida soportan el esfuerzo del giro por el conductor, sobre la base de una demanda del conductor introducida en el eje de dirección.
Básicamente, tales sistemas de dirección se controlan midiendo el par en el eje de dirección, que es aplicado en el eje de dirección por el conductor. Los medios de potencia asistida pueden ser un dispositivo de par de potencia asistido, el cual suministra el par al dispositivo de dirección con respecto al par del eje de dirección aplicado por el conductor. Los medios de potencia asistida podrían ser también un dispositivo de superposición, que suministra un ángulo adicional que superpone a la demanda del ángulo de giro del conductor, un ángulo adicional.
Algunas veces, sucede que el conductor suelta las manos del volante y el par sobre el eje de dirección es más el resultado de la inercia del sistema que la influencia del conductor. En tal estado sin manos, la situación de la dirección debe ser también una situación claramente definida. Comúnmente, el conductor podría esperar que las ruedas se ajusten en una dirección recta de avance en tal estado sin manos.
Descripción de la técnica relacionada El documento US6219603 divulga un procedimiento de determinación del estado sin manos. La idea básica es que en un estado sin manos las vibraciones del par sobre el eje de dirección no sean amortiguadas por el conductor. Cuando la magnitud del par es inferior a un umbral predeterminado, se estima el estado sin manos.
El documento EP1934083B1 divulga un procedimiento de determinación del estado sin manos en el cual se comparan las variaciones de los pares manuales sobre el volante, y si las variaciones exceden de un umbral predeterminado, se determina el estado usando las manos. En otro caso, si las variaciones son inferiores a un valor umbral, se determina el estado sin manos.
El documento EP 2 093 093 A2 divulga un procedimiento de determinación del estado sin manos en el cual se comprueba el par de dirección, o alternativamente las variaciones de los pares manuales sobre el volante, y si el par
o alternativamente las variaciones exceden de un valor umbral, se incrementa un contador en una unidad. Además, si dicho par de dirección o alternativamente dichas variaciones son inferiores a un valor umbral, se disminuye el contador en una unidad. El estado usando las manos se determina cuando dicho contador tiene un valor menor que un cierto límite.
Durante el uso, con los métodos conocidos, algunas veces se determina erróneamente el estado sin manos, aunque el conductor tenga las manos sobre el volante.
Sumario de la invención Un objeto de la invención es proporcionar un método para mejorar el reconocimiento del estado sin manos.
Este objeto se consigue con un método que presenta las cualidades caracterizadas en la reivindicación 1.
La solución consiste en un método de control que comprende los pasos siguientes:
determinar un par M sobre el volante, sobre la base del par en el eje de dirección;
determinar la derivada del par detectado en el volante ∂M/∂t;
si el valor absoluto del par M en el volante es inferior a un límite umbral del par, ε1, y si el valor absoluto de la derivada ∂M/∂t del par M del volante es inferior a un límite umbral de la derivada, ε2, se incrementa un contador C en una unidad,
si el valor absoluto del par M sobre el volante es mayor o igual que un límite umbral del par, ε1, y/o si el valor absoluto de la derivada del par del volante ∂M/∂t es mayor o igual que un límite umbral de la derivada del par, ε2, dicho contador C se disminuye en una unidad,
si dicho contador C tiene un valor mayor o igual a un límite N1 de la cuenta umbral, se determina el estado de manos libre.
Como resultado, se determina el estado sin manos con una alta fiabilidad. Una simple comprobación del par sobre el eje de dirección no puede evitar algunos problemas de cálculo al determinar el estado sin manos. La invención reduce los errores en la detección del estado sin manos en el caso de un estado en el que el vehículo está rodando en línea recta hacia delante y casi sin necesidad de acción por parte del conductor. Al usar el par del volante en lugar del propio par del eje de dirección, se cubren mejor las influencias de la inercia en el dispositivo de dirección.
En un modo de realización preferido, el par sobre el volante puede ser calculado por un observador, el cual utiliza un modelo de vehículo y un modelo de dispositivo de dirección. El observador puede mejorar los resultados del cálculo utilizando valores de medición adicionales. Tales valores podrían ser uno o más de los siguientes: velocidad del vehículo, ángulo de rotación del volante, señales del medio de la potencia asistida como la posición rotacional de un motor eléctrico incluido en los medios de potencia asistida. También se pueden utilizar otros valores para el cálculo.
En un modo de realización preferido de la invención, el par del eje de dirección es filtrado por un filtro de paso bajo. Con ello, se reducen las influencias de las vibraciones o los fallos digitales. Para mejorar el método, se asume la conmutación desde un estado usando las manos a un estado sin manos con un límite diferente al de la conmutación desde un estado sin manos a un estado usando las manos. Por tanto, el estado usando las manos se determina si dicho contador C tiene un valor inferior a un umbral límite inferior N2 de la cuenta. Este límite inferior N2 de la cuenta es preferiblemente inferior al límite umbral N1 de la cuenta. Esto reduce las posibles vibraciones entre el estado con manos y el estado sin manos. El límite inferior N2 de la cuenta podría ser 1/2 o 1/3 del límite N1 de la cuenta o bien N2 podría ser cero.
Para evitar problemas con la situación de que el contador C disminuya mucho, se utiliza preferiblemente un límite tope N3 de la cuenta. El contador C no disminuirá más cuando se alcanza el límite tope N3 de la cuenta. El límite tope N3 de la cuenta podría ser cero o igual al límite inferior N2 de la cuenta o un valor intermedio.
Una mejora adicional consiste en filtrar el valor de salida del estado sin manos por medio de un filtro paso bajo, preferiblemente con una función de filtrado digital. Esta característica reduce las vibraciones entre el estado sin manos y el estado con manos. Cualquier cambio entre el estado con manos y el estado sin manos, o entre el estado sin manos y el estado con manos, será entregado como salida tras un corto retardo de tiempo. En principio, este filtrado de paso bajo comprueba si el valor del estado no cambia demasiado frecuentemente y el estado no sería detectado con claridad o seguridad. Cuando cambia el estado sin manos/con manos, se efectúa un retardo de tiempo por el filtrado digital. Durante este retardo de tiempo por el filtrado de paso bajo, se “comprueba” si el valor
del estado detectado cambia de nuevo. Cuando el valor del estado cambia de nuevo, la salida del valor del estado no cambia. La constante de tiempo para tal filtrado o retardo estaría preferiblemente en la gama entre uno y tres segundos.
El límite umbral ε1 del par y/o el límite umbral de la derivada del límite ε2 del par estaría preferiblemente adaptado al
dispositivo real de dirección y a los parámetros del vehículo y/o al comportamiento del conductor y/o a otros parámetros de la carretera. Por tanto, es posible calcular el límite umbral ε1 del par como una combinación de un límite básico ε0 del par y la variación del par en el volante.
Alternativamente o en combinación, sería posible también calcular el límite umbral ε2 de la derivada del par como combinación de un límite base ε3 de la derivada del par y la variación del par en el volante. La variación, o desviación típica, del par del volante refleja la situación real de la... [Seguir leyendo]
Reivindicaciones:
1. Método para controlar un dispositivo de dirección con medios de potencia de dirección asistida (7, 8, 9) para un vehículo motorizado, con al menos una rueda (4) que gire, comprendiendo el dispositivo de dirección: un eje (1) de dirección con un primer extremo para adoptar un volante (2) , un dispositivo (10) de control que controla dichos medios de potencia asistida (7, 8, 9) ,
medios sensores (11) que detectan el par del eje de dirección, introducido en dicho eje (4) de dirección, medios para determinar una situación sin manos, en la cual el conductor no introduce ningún par en dicho eje (1) de dirección,
donde los medios de potencia de dirección asistida (7, 8, 9) apoyan al conductor sobre la base de la demanda del conductor introducida en el eje (1) de dirección, donde el método comprende los pasos de:
determinar un par (M) del volante sobre la base del par del eje de dirección determinar una derivada con respecto al tiempo (∂M/∂t) del par (M) detectado en el volante; estando además caracterizado el método por los pasos siguientes:
si el valor absoluto del par (M) del volante es inferior a un límite umbral (ε1) del par, y si el valor absoluto de la derivada, (∂M/∂t) , del par del volante es inferior a un límite umbral (ε2) de la derivada del par, un contador
(C) aumenta en una unidad,
si el valor absoluto del par (M) del volante es mayor o igual a un límite umbral (ε1) del par, y/o si el valor absoluto de la derivada, (∂M/∂t) , del par del volante es mayor o igual a un límite umbral (ε2) de la derivada del par, dicho contador (C) disminuye en una unidad,
si dicho contador (C) tiene un valor igual o mayor que un límite umbral (N1) de la cuenta, se determina el estado sin manos.
2. Método para controlar un dispositivo de dirección de acuerdo con la reivindicación 1, caracterizado porque el par del eje de dirección es filtrado por un filtro paso bajo.
3. Método para controlar un dispositivo de dirección de acuerdo con una o más de las reivindicaciones precedentes, caracterizado porque si dicho contador (C) tiene un valor inferior a un límite umbral bajo (N2) de la cuenta, se determina el estado con manos.
4. Método para controlar un dispositivo de dirección de acuerdo con una o más de las reivindicaciones precedentes, caracterizado porque la salida del valor del estado sin manos se filtra por un filtro paso bajo.
5. Método para controlar un dispositivo de dirección de acuerdo con una o más de las reivindicaciones precedentes, caracterizado porque el límite umbral (ε1) del par se calcula como combinación de un límite básico (ε0) del par y la variación del par del volante.
6. Método para controlar un dispositivo de dirección de acuerdo con una o más de las reivindicaciones precedentes, caracterizado porque el límite umbral (ε2) de la derivada del par se calcula como combinación de un límite básico (ε3) de la derivada del par y la variación del par del volante.
7. Método para controlar un dispositivo de dirección de acuerdo con una o más de las reivindicaciones precedentes, caracterizado porque en el caso de determinar el estado sin manos, se entrega una señal o mensaje de aviso al conductor.
8. Método para controlar un dispositivo de dirección de acuerdo con una o más de las reivindicaciones precedentes, caracterizado porque en el caso de determinar el estado sin manos, se suministra una señal adicional en forma de señal de demanda de par a los medios de potencia asistida (7, 8, 9) .
9. Método para controlar un dispositivo de dirección de acuerdo con una o más de las reivindicaciones precedentes, caracterizado porque en el caso de determinar un estado sin manos, se suministra una señal adicional en forma de señal de ángulo de dirección superpuesto a los medios de potencia asistida (7, 8, 9) .
10. Método para controlar un dispositivo de dirección de acuerdo con las reivindicaciones 8 o 9, caracterizado porque la señal adicional es adecuada para girar el vehículo en la dirección recta de avance.
Patentes similares o relacionadas:
Estimación de la temperatura de una bobina, del 27 de Mayo de 2020, de THYSSENKRUPP PRESTA AG: Método para la estimación del incremento de temperatura perdido (TIncrementoPerdido) después de reiniciar un sistema para la estimación de la temperatura de una […]
Husillo de rosca de bolas de una dirección asistida electromecánica con cojinete de bolas de contacto angular integrado y compensación de diferentes dilataciones térmicas, del 13 de Mayo de 2020, de THYSSENKRUPP PRESTA AG: Dirección asistida electromecánica para un vehículo de motor, con un servomotor que acciona un componente , desplazable axialmente, por medio de una tuerca […]
Dirección asistida electromecánica, procedimiento para la determinación de un ángulo de giro absoluto y procedimiento para la calibración de un dispositivo de medición para la medición de un ángulo de giro absoluto, del 15 de Abril de 2020, de THYSSENKRUPP PRESTA AG: Dirección asistida electromecánica para un automóvil, que comprende • un árbol de dirección que está soportado de forma giratoria alrededor de un eje de giro […]
Dispositivo de vigilancia externo con soporte de regeneración inversa integrado, del 1 de Abril de 2020, de THYSSENKRUPP PRESTA AG: Un aparato de servodirección eléctrica para asistir a la dirección de un vehículo de motor al conferir par generado por un motor eléctrico a un mecanismo […]
Mecanismo de absorción de impactos de un motor de dirección, del 4 de Marzo de 2020, de Guangdong Hua'chan Research Institute of Intelligent Transportation System Co., Ltd: Un mecanismo de absorción de impactos de un motor de dirección, configurado para disponerse dentro del motor de dirección, y que comprende: un conjunto […]
Accionamiento de husillo, del 20 de Noviembre de 2019, de SFS INTEC HOLDING AG: Husillo roscado con una parte de accionamiento , que presenta un eje longitudinal (A) y está alojada a través de un primer cojinete , […]
Chasis de vehículo eléctrico y vehículo eléctrico que usa el mismo, del 13 de Noviembre de 2019, de Guangdong Hua'chan Research Institute of Intelligent Transportation System Co., Ltd: Un chasis de vehículo eléctrico que comprende un sistema de bastidor , un sistema de amortiguación de motor de dirección montado en el sistema de bastidor […]
Dispositivo para generar una fuerza auxiliar en un sistema de dirección de un automóvil, del 23 de Octubre de 2019, de THYSSENKRUPP PRESTA AG: Dispositivo para aplicar una fuerza auxiliar en un sistema de dirección de automóvil, que comprende un tornillo helicoidal de accionamiento conectable […]