Dispositivo artificial articulado para la manipulación y el transporte de alimentos.
Dispositivo artificial articulado para la manipulación y transporte de alimentos.
Esta invención se refiere a un robot articulado móvil. En particular realiza las tareas de manipulación y transporte de alimentos en lugares de dimensiones reducidas.
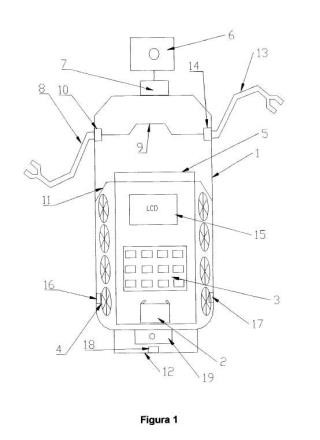
El sistema está compuesto por: dos brazos articulados (12, 13), con sendos motores para moverlos 360º (10, 14), una cámara de visión artificial (6), con sendos motores para mover la cámara de visión artificial (7), una barra fija para la manipulación por humanos (9), una cesta para introducir los alimentos (5), una LCD grafica para ver e introducir datos (15), ocho ruedas para el movimiento (4) con sus sendos motores (16, 17), una palca principal (3), cerebro del robot y una batería que nos suministra la energía (2), una barra flexible (11) para agarrar la cesta (5), y por ultimo un sistema elevador (12) con su correspondiente motor (18) y su plataforma (19).
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201300310.
Solicitante: ARROYO RUIZ, Jose Marcos.
Nacionalidad solicitante: España.
Inventor/es: ARROYO RUIZ,Jose Marcos.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B25J5/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › Manipuladores montados sobre ruedas o sobre soportes móviles (B25J 1/00 tiene prioridad; manipuladores de control programado B25J 9/00).
- B25J9/00 B25J […] › Manipuladores de control programado.
- B62B3/14 B […] › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62B VEHICULOS PROPULSADOS A MANO, p. ej. COCHES DE MANO O COCHES DE NIÑO; TRINEOS (caracterizados por la propulsión animal B62C; propulsión de trineos por el conductor o por motor B62M). › B62B 3/00 Coches de mano que tienen más de un eje que llevan ruedas que sirven para el desplazamiento; Dispositivos de dirección con este fin; Aparellaje con este fin. › caracterizados por los medios para encajar o apilar, p.ej. carros de la compra.
- G06Q50/28 FISICA. › G06 CALCULO; CONTEO. › G06Q METODOS O SISTEMAS DE PROCESAMIENTO DE DATOS ESPECIALMENTE ADAPTADOS PARA FINES ADMINISTRATIVOS, COMERCIALES, FINANCIEROS, DE GESTION, DE SUPERVISION O DE PRONOSTICO; METODOS O SISTEMAS ESPECIALMENTE ADAPTADOS PARA FINES ADMINISTRATIVOS, COMERCIALES, FINANCIEROS, DE GESTION, DE SUPERVISION O DE PRONOSTICO, NO PREVISTOS EN OTRO LUGAR. › G06Q 50/00 Sistemas o métodos especialmente adaptados para sectores de negocios específicos, p. ej. servicios públicos o turismo (informática para la atención sanitaria G16H). › Logística, p. ej. almacenamiento, carga, distribución o transporte.
Fragmento de la descripción:
Dispositivo artificial articulado para la manipulación y transporte de
alimentos.
SECTOR TÉCNICO
La presente invención se refiere a un sistema artificial para la manipulación y el transporte de alimentos, encuadrándose dentro del sector de la robótica.
La presente invención está formada por una serie de dispositivos y procedimientos los cuales nos va a dar la posibilidad de realizar ciertas tareas con más facilidad.
ESTADO DE LA TÉCNICA
El objeto de la presente invención es proporcionar un dispositivo robótico articulado para realizar la compra, especialmente en entornos cerrados, como puede ser un supermercado, un centro comercial, grandes almacenes y similares.
Uno de los objetivos de la presente invención es proporcionar una solución para realizar compras y la presente invención proporciona un robot articulado que realiza dicha tarea, no teniéndose que desplazar a un supermercado para realizar la compra.
Con la tecnología que hay en la actualidad se tiene conocimiento de complicados robots móviles que te ayudan a hacer la compra. Por ejemplo existen robots en el mercado, que te realizan este tipo de tareas como Robovie, Tmusuk, vehículo seguidor, de asistente de compras, todas ellas realmente complejas debido a la tecnología que llevan. La presente invención pretende realizar un robot sencillo, la cual puede estar diseñada y construida con componentes muy sencillos y económicos, considerándolo un producto barato para hacer una compra convencional.
Del mismo modo la patente ES2315728T3 describe un procedimiento para la manipulación de objetos en forma de barra. Según en la citada patente puede recoger alimentos en la industria láctea, como yogures, bebidas o similares.
Como se indica en la mencionada patente, la carga se hace de forma manual o parcialmente automática. El procedimiento propuesto por este dispositivo se centra en la calibración semiautomática de los procesos distintos de fabricación.
Así la patente ES2383992T3 desai be un dispositivo el cual utiliza un sistema de ventosas para la manipulación de productor, por ejemplo la manipulación de cajas. Como se indica en la citada patente el dispositivo utiliza un sistema de ventosas conectadas con conductos flexibles a un generador de vacío que está situado sobre el armazón de la maquina o en algunos casos sobre el robot, no pudiendo ser muy rápido a consecuencia de su peso.
Por otra parte la patente ES2358139A1 presenta un robot social formado por un sistema de visión artificial, compuesto por unas cámaras webcam y sistema de detección de obstáculos constituido por ultrasonidos y sistema de desplazamiento formado por dos ruedas. El objetivo de este robot social no es el de hacer una compra, pero en la citada patente se especifica que utiliza sistemas que interaccionan con su entorno que lo rodea aprendiendo del mismo.
No se conocen hasta la fecha sistemas que proporcionen un dispositivo capaz de realizar una tarea de manipulación y transporte de alimentos de una forma sencilla, eficaz y económica, a la vez que proporcione a los usuarios mejor calidad de vida, pudiendo proporcionar información de la calidad de los alimentos que estamos tomando.
Del mismo modo los sistemas ya conocidos, permiten la manipulación de determinados objetos en condiciones muy aisladas, a diferencia de la presente invención que permite realizar unos movimientos más fluidos, pudiendo trabajar en ambientes más grandes y pudiéndose aplicar en tareas diferentes.
DESCRIPCIÓN DETALLADA DE LA INVENCIÓN
El robot objeto de la presente invención, responde a un dispositivo articulado para la manipulación y el transporte de alimentos. La citada invención permite la manipulación y el transporte de alimentos de manera eficiente, permitiendo interactuar con humanos y con el entorno que hay a su alrededor.
El dispositivo está constituido por dos dispositivos electromecánicos articulados dotados de sensores de presión en cada una de sus pinzas de agarre (8, 13), dos actuadores eléctricos o motores con juego de engranajes para mejor movilidad de los dispositivos electromecánicos articulados (10, 14), estos dos dispositivos se fijan en el chasis del robot (1).
Como se puede observar, la cámara (6) de visión artificial está articulada por dos motores (7), el cual nos da una visión periférica del entorno que le rodea. Igualmente se observa un compartimiento rectangular (5), el cual se utiliza para el almacenaje de los alimentos u objetos, este compartimiento rectangular va sujeto a una barra (11) que va de un extremo al otro del robot sujetando dicha base rectangular, la barra del dispositivo es movible.
La ruedas (4) es un sistema de desplazamiento en línea, y están ubicadas en la parte inferior del robot. El robot tiene un total de ocho ruedas, las cuales están accionadas por dos motores eléctricos (16, 17). Las ruedas podrán cambiar su sistema de desplazamiento en línea por otro tipo de transmisión que pueden ser la ruedas en forma de cuadrado o triangulo con una rueda delante.
La pantalla LCD gráfica (15) se sitúa en la parte trasera del robot y se utiliza para introducir si es necesario datos y variables, o para conocer el estado del robot como el nivel de baterías. La Lcd gráfica será táctil.
Las comunicaciones y control del robot se desarrollaran en la placa principal (3), esta placa es la que realiza los controles para mover los dispositivos mecánicos articulados, las ruedas del robot, los mensajes que le llegan a la pantalla ICD gráfica y todos los dispositivos que conforman el robot. Como la cámara de visión artificial sensores analógicos de posición y sistemas
de detección de obstáculos. El artefacto llevará un microcontrolador de 32Bits, puesto que es más económico que un microprocesador, aparte de todo esto; la placa principal llevara WIFI para conectarse a internet y poder comunicarse con cualquier dispositivo electrónico del mercado, aparte este sistema podrá aprender progresivamente de internet siendo un sistema autosuficiente a la vez que aprende de sus errores. El robot llevara una brújula digital para orientarse por los pasillos de cualquier establecimiento.
El robot también dispone en su parte inferior de un sistema elevador (12) el cual nos va a proporcionar que el dispositivo artificial alcance cualquier producto sin la necesidad de que lo ayude nadie. Este sistema elevador estará dotado por un motor eléctrico o un servo motor (18) que a la vez eleva una plataforma (19) subiendo al dispositivo articulado a una altura determinada por los sensores de proximidad.
El robot o dispositivo artificial dispondrá de una batería (2) de aproximadamente una tensión de 7,4V a 12V, y una intensidad de 2A a 3A. Po otro lado el robot llevara una barra fija (9) por si fuese necesario desplazarlo manualmente por un humano. El robot llevara un sintetizador de voz el cual dirá frases concretas para comunicarse con el exterior.
El procedimiento operativo de dicha invención consiste en el seguimiento de patrones de conducta recogidos por la cámara de visión artificial (6) o por posiciones de estacionamiento, de ahí que tenga una brújula digital y conexión WIFi para internet, pudiéndose crear un mapa del entorno en todo momento para saber dónde se tiene que desplazar. Una vez que toda esta información sea procesada por la placa principal (3) el sistema le permitirá tomar la decisión más adecuada que es, la de realizar una compra fácilmente.
BREVE DESCRIPCIÓN DE LOS DIBUJOS
En la presente invención se resalta la figura 1 que corresponde al chasis del robot o dispositivo artificial (1), en la que se puede apreciar dos dispositivos electromecánicos articulados (8, 13), movido por otros dos motores con juego de engranaje reductora (10,14) dándonos una flexibilidad de 360°. Una cámara
de visión artificial (6) que es movida por dos motores (7) con el suficiente par para mover la carama. Una palca principal (3) y una batería (2), la primera de ellas es el cerebro del robot, es donde se realizan todos los procesos de decisión y control del dispositivo artificial. Y la segunda es la batería que nos proporciona la energía.
En la parte inferior del robot se encuentran las ruedas (4). El robot tiene un total de 8 ruedas, las cuales son movidas por sendos motores (16,17). En la parte media del robot se encuentra la cesta (5) destinada a guardar los producto, esta cesta está anclado sobre una barra - soporte flexible (11) de la cual se podrá quitar y poner a su antojo. En la parte media del robot también se encuentra una LCD gráfica (15), en la que podemos introducir datos y variables y saber el estado de los dispositivos que hay en el robot. Un poco más arriba se encuentra...
Reivindicaciones:
1. Dispositivo artificial articulado para la manipulación y el transporte de alimentos, es un nuevo procedimiento para la manipulación y el transporte de alimentos, permitiendo interactuar con humanos y con el entorno que hay a su alrededor caracterizado porque presenta:
- Dos dispositivos electromecánicos articulados (12, 13), con sendos motores para moverlos 360° (10, 14).
- Una cámara de visión artificial (6), con sendos motores (7) para mover la cámara arriba - abajo, izquierda - derecha.
- Una barra fija para la manipulación por humanos (9).
- Una cesta para introducir los alimentos (5), con su correspondiente barra flexible (11) para agarrar la cesta.
- Una LCD gráfica (15) para ver e introducir los datos.
- Un sistema de ocho ruedas (4), con sendos motores (16,17).
- Una placa principal (3), con un microcontrolador que actúa como el cerebro del robot y una batería que suministra energía (2).
- Un sistema elevador (12), con su correspondiente motor (18) y su plataforma (19).
- Dos dispositivos electromecánicos dotados con sensores de presión en cada pinza de agarre (8, 13).
- Un microcontrolador de 32 bits por que utiliza los controladores de los servomotores y todos los dispositivos del robot incluido la WIFI.
2. Dispositivo artificial articulado para la manipulación y el transporte de alimentos según reivindicación 1 caracterizado porque utiliza dos dispositivos electromecánicos dotados con sensores de presión en cada pinza de agarre (8, 13), dos actuadores eléctricos o motores con juego de engranajes para mejor movilidad de los dispositivos electromecánicos articulados (10,14).
3. Dispositivo artificial articulado para la manipulación y el transporte de alimentos según reivindicación 1 caracterizado porque utiliza una barra fija (9) con forma de asa ergonómica.
4. Dispositivo artificial articulado para la manipulación y el transporte de alimentos según reivindicación 1 caracterizado porque contiene una cesta de dimensiones apropiadas (5) que puede convertirse en bolso.
5. Dispositivo artificial articulado para la manipulación y el transporte de alimentos según reivindicaciones 1 y 5 caracterizado porque utiliza una barra flexible para agarra la cesta (5).
6. Dispositivo artificial articulado para la manipulación y el transporte de alimentos según reivindicación 1 caracterizado porque utiliza una LCD gráfica táctil situada en I parte trasera del robot de manera que se pueden ver e introducir datos.
7. Dispositivo artificial articulado para la manipulación y el transporte de alimentos según reivindicación 1 caracterizado porque utiliza un sistema de ocho ruedas en línea (4) (cuatro en cada parte del robot), con dos motores (16,17).
8. Dispositivo artificial articulado para la manipulación y el transporte de alimentos según reivindicaciones 1 y 8 caracterizado porque el sistema de ruedas utilizado (4) están ubicadas en la parte inferior del robot.
9. Dispositivo artificial articulado para la manipulación y el transporte de alimentos según reivindicaciones 1 y 9 caracterizado porque Las ruedas (4) pueden cambiar su sistema de desplazamiento en línea por otro tipo de transmisión que tienen varios sistemas de desplazamiento, en línea, cuadrado o triangulo con una rueda delante.
10. Dispositivo artificial articulado para la manipulación y el transporte de alimentos según reivindicación 1 caracterizado porque posee un microcontrolador de 32 bits, y porque utiliza los controladores de los servomotores y todos los dispositivos del robot incluido la WIFI.
11. Dispositivo artificial articulado para la manipulación y el transporte de alimentos según reivindicación 1y 11 caracterizado porque el robot lleva una brújula en la placa principal (3).
Patentes similares o relacionadas:
Carro de la compra con dispositivo de seguridad, del 6 de Mayo de 2020, de TIENDA AVILA MARIA DE JESUS: 1. Carro de la compra de servicio conformado de manera conocida por un bastidor de estructura plegable o rígida de cualquier tipo de material apropiado, […]
Carro mecanizado robotizado multidireccional, del 20 de Diciembre de 2019, de TREND ROBOTICS: 1. Carro mecanizado robotizado para evitar el empuje físico del carro tradicional, caracterizado porque presenta: - Una estructura de hierro galvanizado o inoxidable […]
Sistema de comunicación bidireccional para rastrear ubicaciones y estados de vehículos con ruedas, del 13 de Noviembre de 2019, de Gatekeeper Systems, Inc: Un sistema para controlar el uso del vehículo, que comprende: un dispositivo configurado para transmitir repetidamente un comando de bloqueo […]
 Chasis móvil, del 26 de Junio de 2019, de Eberlein, Martin: Chasis móvil para dispositivos , como carros de compra, carros de transporte, estantes y similares, pudiendo insertarse el chasis ahorrativo de espacio en otro chasis […]
Chasis móvil, del 26 de Junio de 2019, de Eberlein, Martin: Chasis móvil para dispositivos , como carros de compra, carros de transporte, estantes y similares, pudiendo insertarse el chasis ahorrativo de espacio en otro chasis […]
Soporte de botellas y unidad de soporte de botellas, del 22 de Mayo de 2019, de Bolz, Michael: Soporte de botellas para su fijación a una estructura de rejilla de alambre formada por barras de rejilla dispuestas transversalmente, con un dispositivo […]
Carro de transporte, del 9 de Mayo de 2019, de WANZL METALLWARENFABRIK GMBH: Carro de transporte apilable con un bastidor móvil y con un cesto formado de alambres, en el que el bastidor móvil está equipado con dos […]
Sistema de comunicación bidireccional para rastrear localizaciones y estados de vehículos con ruedas, del 7 de Mayo de 2019, de Gatekeeper Systems, Inc: Un sistema para recuperar carritos de la compra, comprendiendo el sistema: una pluralidad de carritos de compra , cada uno de los cuales incluye […]
CARRO DE LIMPIEZA VIARIA PLEGABLE Y APILABLE, del 18 de Febrero de 2019, de URBASER, S.A.: 1. Carro de limpieza viaria plegable y apilable, que comprende: - un chasis conformado por una pluralidad de barras (1', 1'') articuladas, estando dicho chasis conectado […]