DISPOSITIVO PARA EL AMARRE Y DESAMARRE AUTOMATICO DE UN EMISOR SONAR REMOLCADO A UNA LÍNEA DE REMOLCADO DE UN SONAR ACTIVO.
Sistema de amarre y de manutención automática de un objeto sumergible,
o "Pez", que incluye al menos una antena de emisión, remolcado por una línea de remolcado, caracterizado porque incluye al menos un dispositivo (21) de amarre automático para realizar el amarre mecánico del pez (11) a una línea de tracción (13) y de conexión de este pez a una estructura que transporta señales y energía en esta misma línea, incluyendo el dispositivo un elemento macho (32) solidario a la línea de tracción (13) y un elemento hembra (31) solidario al pez, estando el elemento macho y el elemento hembra configurados para encajarse el uno en el otro, para que la línea de tracción (13) se pueda insertar automáticamente en el elemento hembra (31) y para que, al realizarse la inserción del elemento macho (31) en el elemento hembra (32) por el deslizamiento de la línea (13) en el elemento hembra (31), el encaje del elemento macho en el elemento hembra haga que el elemento hembra sea solidario a la línea de tracción
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2007/060853.
Solicitante: THALES.
Nacionalidad solicitante: Francia.
Dirección: 45, RUE DE VILLIERS 92200 NEUILLY SUR SEINE FRANCIA.
Inventor/es: COUPEAUD,Christophe, GOUDEAU,Jean Philippe.
Fecha de Publicación: .
Fecha Solicitud PCT: 11 de Octubre de 2007.
Clasificación Internacional de Patentes:
- B63B21/56 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B63 BUQUES U OTRAS EMBARCACIONES FLOTANTES; SUS EQUIPOS. › B63B BUQUES U OTRAS EMBARCACIONES FLOTANTES; EQUIPAMIENTO PARA EMBARCACIONES (disposiciones relativas a la ventilación, calefacción, refrigeración o acondicionamiento de aire en los buques B63J 2/00; subestructuras flotantes como soportes de las dragas o máquinas par el movimiento de tierras E02F 9/06). › B63B 21/00 Aparatos de maniobra; Aparatos de desplazamiento, remolque o empuje; Anclaje (anclaje dinámico B63H 25/00; equipos para embarque en costas, puertos o en otras estructuras marinas fijas, p.ej. para aterrizaje, E02B). › Aparatos de remolque o de empuje (remolcadores B63B 35/66; aparatos de remolque para deportes acuáticos B63B 34/60).
- B63B21/60 B63B 21/00 […] › Sistema de largado rápido.
- B63B21/66 B63B 21/00 […] › Equipos especialmente adoptados para remolcar bajo el agua objetos o buques, p. ej. carenado hidrodinámico por cables de remolcar, enmaestrado.
- B63G8/39 B63 […] › B63G INSTALACIONES OFENSIVAS Y DEFENSIVAS EN LOS BUQUES; COLOCACION DE MINAS; DRAGADO DE MINAS; SUBMARINOS; PORTAAVIONES (medios de ataque o de defensa en general, p. ej. torretas, F41H). › B63G 8/00 Embarcaciones sumergibles, p. ej. submarinos (cascos de submarinos B63B 3/13; cámaras de buceo unidas mecánicamente a una base, p. ej. mediante un cable B63C 11/34; artefactos automotores de buceo B63C 11/46; torpedos F42B 19/00). › Disposición de instrumentos de vigilancia sónica, p. ej. baja frecuencia, sonar.
- B63G8/42 B63G 8/00 […] › Embarcaciones submarinas remolcadas.
Clasificación PCT:
- B63B21/60 B63B 21/00 […] › Sistema de largado rápido.
- B63B21/66 B63B 21/00 […] › Equipos especialmente adoptados para remolcar bajo el agua objetos o buques, p. ej. carenado hidrodinámico por cables de remolcar, enmaestrado.
- B63G8/39 B63G 8/00 […] › Disposición de instrumentos de vigilancia sónica, p. ej. baja frecuencia, sonar.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia.
PDF original: ES-2359948_T3.pdf

Fragmento de la descripción:
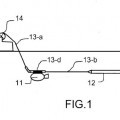
La presente invención se refiere a los sonares activos de inmersión variable, traccionado por un barco de superficie. Tal dispositivo se describe en el documento US 5 752 460. Se refiere más particularmente a los sonares activos remolcados que se presentan como sistemas biestáticos en los cuales la antena de emisión está integrada en un objeto sumergible o “Pez” y la antena de recepción está constituida por una antena lineal (Flauta) remolcada detrás del pez. Tal línea de remolcado se denomina dependiente ya que el pez y la antena lineal de recepción son solidarias a una misma línea.
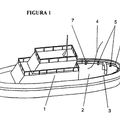
La realización de tal sonar, representado esquemáticamente en la figura 1, incluye dos etapas de manutención que consisten en una primera etapa en la botadura del sonar y en una segunda etapa en la recuperación del sonar y su almacenamiento en el barco tractor.
En los barcos de superficie, las antenas lineales de recepción se almacenan tradicionalmente en un torno, por razones evidentes de espacio.
De este modo, la botadura de un sonar activo que incluye a la vez una antena de misión montada en una embarcación sumergible traccionado, también denominada “pez”, y una antena lineal de recepción consiste en primer lugar en desenrollar la antena accionando el torno y dejar la antena sumergirse en el extremo del cable de remolcado. Consiste a continuación en acoplar mecánica y eléctricamente el pez à la línea de remolcado y a continuación poner botar el pez con la ayuda de cualquier medio de elevación y de manutención.
Por el contrario, la subida de tal sonar a bordo del barco de superficie consiste en primer lugar en halar la línea de remolcado, y a continuación en sacar el pez del agua y depositarlo en la cubierta del barco, y después desacoplar el pez de la línea. cuando éste está desacoplado, la antena lineal que sigue es arrastrada a bordo y enrollada en el torno.
La realización de tal sonar incluye por lo tanto un cierto número de operaciones de amarre y desamarre, realizadas manualmente, que según el peso del emisor pueden necesitar la movilización de un número más o menos importante de operadores. Ahora bien, cuando el estado del mar es difícil, con temporal, tales operaciones, generalmente efectuadas por hombres de la tripulación desde la plataforma trasera del barco, pueden revelarse para estos hombres muy delicadas, sufridas, incluso peligrosas, de manera que la aplicación del sonar puede ser imposible por razones de seguridad. La realización de tal sistema requiere, además, una localización precisa, mediante marcación en el cable tractor por ejemplo, de la posición del pez respecto de la plataforma de manutención, de manera a saber, en particular, cuando éste se encuentra en la posición que induce la parada de la sirga y la carga a bordo, operación que requiere igualmente una intervención humana.
Para solucionar estas dificultades de realización, una solución conocida consiste en almacenar sobre dos tambores separados de cable electrotractor que permanece amarrado al pez y la antena lineal de recepción. De este modo, la botadura del sonar se efectúa desenrollando completamente la antena lineal de recepción (es decir, la “flauta”) en el mar y conectando mecánica y eléctricamente, el extremo emergido de la flauta al pez, al término del desenrollado y antes de la inmersión completa. Una vez efectuada la conexión, el pez fijado a la flauta, es lanzado al mar desenrollando el cable electrotractor.
En esta configuración, las operaciones de amarre y de desamarre se encuentran de alguna manera simplificadas. Sin embargo, tal configuración que necesita la utilización de dos tambores situados en la plataforma trasera del barco, plataforma, por otra parte, de dimensiones limitadas, se revela voluminosa. Por otra parte, necesita siempre un conocimiento preciso de la posición del pez respecto de la plataforma y del instante que marca el final del desenrollado de la flauta, y requiere por lo tanto siempre la intervención de operadores humanos.
Un objetivo de la invención es resolver el problema planteado por la necesidad de recurrir a intervenciones humanas. Con este fin, la invención tiene por objeto un sistema de amarre y de conexión automática de un objeto sumergible, o “Pez”, que incluye al menos una antena de emisión, remolcado por una línea de remolcado, pez que puede contener un emisor sonar o, al menos, una antena de emisión. El sistema incluye al menos un dispositivo de amarre automático para realizar de manera automática el amare mecánico del emisor a una línea de tracción y de conexión de este pez a una estructura que transporta señales y energía en esta misma línea.
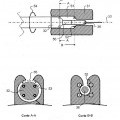
Según una característica de la invención, el dispositivo de amarre automático incluye un elemento macho solidario a la línea de tracción y un elemento hembra solidario al pez. El elemento macho y el elemento hembra están configurados para encajarse el uno en el otro, para que la línea de tracción se pueda insertar automáticamente en el elemento hembra y para que, al realizarse la inserción del elemento macho en el elemento hembra por el deslizamiento de la línea en el elemento hembra, el encaje del elemento macho en el elemento hembra haga que el elemento hembra sea solidario a la línea de tracción.
Según otra característica de la invención, el elemento macho y el elemento hembra del dispositivo automático de amarre del emisor a la línea de tracción incluyen conectores, aptos para ensartarse los unos en los otros.
Según otra característica de la invención, el elemento macho y el elemento hembra del dispositivo de amarre automático del pez a la línea de tracción incluyen, además, medios automáticos de centrado y de posicionamiento, estando estos medios de centrado y de posicionamiento configurados y dispuestos para que la inserción del elemento macho en el elemento hembra garantice el posicionamiento de los conectores del elemento macho en oposición a los conectores del elemento hembra y el acoplamiento de los conectores opuestos.
Según otra característica de la invención, el elemento hembra del dispositivo de amarre automático forma una cavidad tubular apta para recibir el elemento macho, cavidad que incluye dos aberturas axiales, una de las cuales al menos posee una sección suficiente para permitir la inserción axial del elemento macho y una abertura lateral cuyo ancho, sensiblemente igual al diámetro de la línea permite la inserción de la línea de tracción al interior de la cavidad.
Según otra característica de la invención, el elemento macho del dispositivo de amarre automático posee una sección superior a la sección de la línea de tracción sobre la cual se inserta de manera que su paso por la abertura lateral del elemento hembra sea imposible.
Según otra característica de la invención, los medios automáticos de centrado y de posicionamiento del dispositivo de amarre automático están configurados y dispuestos para provocar, en el caso en el que la orientación relativa de los dos elementos uno respecto del otro durante la inserción del elemento macho en el elemento hembra no permite el enfrentamiento de los conectores, un movimiento relativo de rotación del elemento macho y del elemento hembra para de este modo orientar los dos elementos el uno respecto del otro de manera apropiada.
Según otra característica de la invención, los medios automáticos de posicionamiento y de centrado del dispositivo de amarre automático incluyen estructuras en forma de dedos implantadas respectivamente en el contorno del elemento macho y sobre la pared interna de la cavidad del elemento hembra. Las estructuras en forma de dedos del elemento macho están configuradas para alojarse en los espacios que separan las estructuras en forma de dedos del elemento hembra cuando el elemento macho está insertado en el elemento hembra.
Según otra característica de la invención, las estructuras en forma de dedos implantadas en el elemento macho tienen un perfil de extremo diferente del de las estructuras en forma de dedos implantadas en el elemento macho de manera que al estar enfrentadas las estructuras implantadas en el elemento macho a las estructuras implantadas en el elemento hembra, el acercamiento de las dos estructuras provoca necesariamente el deslizamiento de las primeras sobre las segundas.
El sistema según la invención puede también incluir un dispositivo automático de manutención del pez, incluyendo dicho dispositivo los siguientes medios:
- un chasis... [Seguir leyendo]
Reivindicaciones:
1. Sistema de amarre y de manutención automática de un objeto sumergible, o “Pez”, que incluye al menos una antena de emisión, remolcado por una línea de remolcado, caracterizado porque incluye al menos un dispositivo
(21) de amarre automático para realizar el amarre mecánico del pez (11) a una línea de tracción (13) y de conexión de este pez a una estructura que transporta señales y energía en esta misma línea, incluyendo el dispositivo un elemento macho (32) solidario a la línea de tracción (13) y un elemento hembra (31) solidario al pez, estando el elemento macho y el elemento hembra configurados para encajarse el uno en el otro, para que la línea de tracción
(13) se pueda insertar automáticamente en el elemento hembra (31) y para que, al realizarse la inserción del elemento macho (31) en el elemento hembra (32) por el deslizamiento de la línea (13) en el elemento hembra (31), el encaje del elemento macho en el elemento hembra haga que el elemento hembra sea solidario a la línea de tracción.
2. Sistema según la reivindicación 1, en el cual el elemento macho (32) y el elemento hembra (31) del dispositivo automático de amarre (21) del pez a la línea de tracción incluyen conectores (52, 53), aptos para ensartarse los unos en los otros.
3. Sistema según cualquiera de las reivindicaciones 1 o 2, en el cual el elemento hembra (31) del dispositivo de amarre automático forma una cavidad tubular (51) apta para recibir el elemento macho (32) que incluye dos aberturas axiales, una de las cuales al menos (37) posee una sección suficiente para permitir la inserción del elemento macho y una abertura lateral (35) cuyo ancho I, sensiblemente igual al diámetro de la línea (13a) permite la inserción de la línea de tracción (13) al interior de la cavidad (51).
4. Sistema según la reivindicación 3, en el cual el elemento macho (32) del dispositivo de amarre automático posee una sección superior a la sección de la línea de tracción (13) sobre la cual se inserta de manera que su paso por la abertura lateral (35) del elemento hembra (31) sea imposible.
5. Sistema según una cualquiera de las reivindicaciones 1 a 4, en el cual, el elemento macho (31) del dispositivo de amarre automático es un elemento de forma sensiblemente cilíndrica, cuyo eje de simetría se confunde sensiblemente con el (33) de la línea de tracción y cuya sección presenta un diámetro sensiblemente superior al diámetro de la línea; incluyendo el elemento hembra del dispositivo de amarre automático una cavidad (51) de la forma de un tubo cilíndrico cuya sección presenta una diámetro suficiente para permitir la inserción axial del elemento macho
6. Sistema según una cualquiera de las reivindicaciones anteriores, en el cual el elemento macho (32) y el elemento hembra (31) del dispositivo de amare automático (21) del pez a la línea de tracción incluyen, además, medios automáticos (61, 62) de centrado y de posicionamiento, estando los medios de centrado y de posicionamiento configurados y dispuestos para que la inserción del elemento macho (32) en el elemento hembra
(31) garantice el posicionamiento de los conectores del elemento macho (53) en oposición a los conectores del elemento hembra (52) y el ensartado de los conectores enfrentados.
7. Sistema según la reivindicación 6, en el cual, los medios automáticos de centrado y de posicionamiento (61, 62) del dispositivo de amarre automático (21) están configurados y dispuestos para provocar, en el caso en el que la orientación relativa de los dos elementos (31, 32) uno respecto del otro durante la inserción del elemento macho
(32) en el elemento hembra (31) no permite el enfrentamiento de los conectores (52, 53), un movimiento relativo de rotación (54) del elemento macho (32) y del elemento hembra (31) para de este modo orientar los dos elementos el uno respecto del otro de manera apropiada.
8. Sistema según la reivindicación 7, en el cual los medios automáticos de posicionamiento y de centrado del dispositivo de amarre automático incluyen estructuras (61, 62) en forma de dedos implantadas respectivamente en el contorno del elemento macho (32) y sobre la pared interna de la cavidad del elemento hembra (31), estando las estructuras en forma de dedos del elemento macho (62) configuradas para alojarse en los espacios que separan las estructuras en forma de dedos del elemento hembra (61) cuando el elemento macho (32) está insertado en el elemento hembra (31).
9. Sistema según la reivindicación 8, en el cual, las estructuras en forma de dedos implantadas en el elemento macho (62) tienen un perfil de extremo (72) diferente del (71) de las estructuras en forma de dedos implantadas en el elemento macho (61) de manera que al estar enfrentadas las estructuras (62) implantadas en el elemento macho a las estructuras (61) implantadas en el elemento hembra, el acercamiento de las dos estructuras provoca necesariamente el deslizamiento de las primeras sobre las segundas.
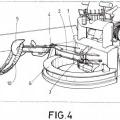
10. Sistema según una cualquiera de las reivindicaciones anteriores, que incluye, además un dispositivo (22) automático de manutención del pez, incluyendo dicho dispositivo los siguientes medios:
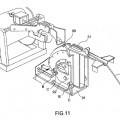
- un chasis portador (91) fijado a la plataforma de manutención del barco (15), encontrándose el dispositivo posicionado de manera fija sobre la plataforma de manutención.
- un soporte móvil (92) sobre el cual se posiciona pez (11) cuando no está amarrado a la línea de tracción (13) y de la cual está separado después del amarre, - medios de desplazamiento (94, 98), para desplazar horizontal y verticalmente y guiar el soporte móvil (92) desde una posición de espera hacia una posición que permite el amarre automático del pez (11) a la línea de tracción (13) o viceversa de esta posición a la posición de espera, - medios (93) para liberar el pez de su soporte móvil cuando éste está amarrado a la línea de tracción y reponer el pez sobre el soporte después del desamarre.11. Sistema según la reivindicación 10, en el cual los medios de desplazamiento del dispositivo automático de manutención incluyen al menos:
- un motor (98),
- un juego superior (94) y un juego inferior (95) de correderas laterales, dispuestas por una y otra parte del chasis (91), que incluyen diferentes segmentos AB, BC y CD para el juego superior y AB, BC para el juego inferior, incluyendo cada corredera de cada uno de los juegos (94, 95) topes (97) en sus extremos, siendo los segmentos AB y BC segmentos rectilíneos y siendo el segmento CD un segmento curvo.
estando los medios de desplazamiento del dispositivo automático de manutención dispuestos y cooperando de manera que el soporte móvil (92), que se desliza a lo largo de las correderas (94, 95), siga en primer lugar un movimiento de traslación horizontal, entre dos puntos A y B, y a continuación un movimiento de traslación vertical entre dos puntos B y C; y finalmente, los topes situados en los puntos C de las correderas del juego inferior (95) que forman un eje de rotación, un movimiento de vuelco hacia atrás entre dos puntos C y D de las correderas del juego superior (94).
12. Sistema según una cualquiera de las reivindicaciones 10 a 11, en el cual el soporte móvil (92) del dispositivo automático de manutención incluye medios para mantener en su sitio el pez (11) cuando el soporte móvil está en posición no volcada y permitir la liberación del pez (11) cuando el soporte móvil está en posición volcada.
13. Sistema según la reivindicación 12, en el cual los medios para mantener en su sitio el pez son muescas (93) realizadas en los flancos del soporte móvil.
14-Sistema según una cualquiera de las reivindicaciones 11 a 13, en el cual el motor (98) del dispositivo automático de manutención es un gato hidráulico accionado en el cual un extremo está fijado al chasis (91) del dispositivo y el otro extremo está fijado al soporte (92).
15. Sistema según una cualquiera de las reivindicaciones 10 a 14, en el cual, el soporte móvil (92) incluye medios
(99) que constituyen una ranura curva que se posiciona bajo la línea de tracción (13) cuando el soporte móvil está en posición volcada, para guiar la línea de tracción (13) y limitar su curvatura.
Patentes similares o relacionadas:
Bloque de amarres para un deflector, del 6 de Junio de 2019, de Mørenot Offshore AS: Un bloque de amarres para un deflector , incluyendo el bloque de amarres un vástago y un brazo basculante fijados de forma pivotante entre […]
Carro de transporte para kayak con ruedas estabilizadoras, del 23 de Enero de 2019, de VILLENA MOLINA,SALVADOR: 1. Carro de transporte para kayak con ruedas estabilizadoras caracterizado por el hecho que el carro lo componen dos elementos principales que […]
SISTEMA DE FONDEO Y MÉTODO DE INSTALACIÓN DE SISTEMA DE FONDEO EN FONDO MARINO, del 3 de Enero de 2019, de UNIVERSIDAD POLITECNICA DE MADRID: La invención se refiere a un sistema de fondeo con medios de unión conectables a cables de fondeo , de remolque y bajada , y a cables […]
Sistema de fondeo y método de instalación de sistema de fondeo en fondo marino, del 3 de Enero de 2019, de UNIVERSIDAD POLITECNICA DE MADRID: La invención se refiere a un sistema de fondeo con medios de unión conectables a cables de fondeo , de remolque y bajada , y a cables guía de cables […]
Sistemas y métodos para mover una carga utilizando vehículos no tripulados, del 27 de Septiembre de 2017, de THE BOEING COMPANY: Un método de mover una carga que comprende: determinar una posición real de una carga unida con una atadura a un vehículo utilizando […]
Vehículo submarino provisto de un sistema de remolque, del 24 de Agosto de 2016, de DCNS SA: Vehículo submarino con una vela equipada con un puente y un sistema de remolque , caracterizado porque el sistema de remolque consta de medios […]
 Estabilizador de remolcadores, del 28 de Julio de 2015, de INDUSTRIAS FERRI, S.A.: Estabilizador de remolcadores para barcos remolcadores destinado a recibir la estacha que marca la línea de tiro entre el barco remolcador […]
Estabilizador de remolcadores, del 28 de Julio de 2015, de INDUSTRIAS FERRI, S.A.: Estabilizador de remolcadores para barcos remolcadores destinado a recibir la estacha que marca la línea de tiro entre el barco remolcador […]
 SISTEMA AUTOMATICO DE RECOGIDA Y MANIPULACION DE SIRGA PARA ENGANCHE ENTRE REMOLCADOR Y BUQUE REMOLCADO, del 5 de Agosto de 2009, de SAR REMOLCADORES, S.L ENCOPIM, S.L: Sistema automático de recogida y manipulación de sirga para enganche entre remolcador y buque remolcado comprendiendo un carro atador desplazable […]
SISTEMA AUTOMATICO DE RECOGIDA Y MANIPULACION DE SIRGA PARA ENGANCHE ENTRE REMOLCADOR Y BUQUE REMOLCADO, del 5 de Agosto de 2009, de SAR REMOLCADORES, S.L ENCOPIM, S.L: Sistema automático de recogida y manipulación de sirga para enganche entre remolcador y buque remolcado comprendiendo un carro atador desplazable […]