Un dispositivo para el agarre y la manipulación de cuerpos cilíndricos alargados, tales como tuberías o similares.
Un dispositivo para el agarre y la manipulación de cuerpos cilíndricos alargados (T),
tales como tuberías otramos de tuberías que comprende una estructura de soporte (2) con unos medios (26) para su montaje en unamáquina de movimiento de tierras, con unos medios de agarre instalados en dicha estructura de soporte (2) queestán diseñados para sostener el cuerpo cilíndrico alargado por lo menos en dos puntos de agarre a lo largo del ejelongitudinal de dicho cuerpo cilíndrico alargado, dichos medios de agarre comprenden por lo menos una parte fija (5)y por lo menos un elemento movible de agarre (6) articulado con dicha parte fija y sujeto a la acción de los mediospara llevarlo desde una posición cerrada, en donde el dispositivo sostiene el cuerpo cilíndrico alargado (T) de modoque se pueda elevar y manipular, a una posición abierta, en donde el dispositivo libera el cuerpo cilíndrico alargado(T) preparado para llevar a cabo la instalación, una pluralidad de rodillos (12, 13, 14, 15) que están articulados endicha por lo menos una parte fija (5) o en dicho por lo menos un elemento movible de agarre (6), dichos rodillosestán diseñados para permitir la rotación de dicho cuerpo cilíndrico alargado (T) mientras dicho elemento movible deagarre está en la posición de cerrado y el dispositivo está sosteniendo el cuerpo cilíndrico alargado (T), dichosrodillos (12, 13, 14, 15) están dispuestos con su eje de rotación paralelo al eje longitudinal de la tubería, y con unperfil que se extiende más allá de la forma de dicho elemento movible de agarre (6) para entrar en contacto con lasuperficie exterior (11) del cuerpo cilíndrico alargado (T) cuando este último está sostenido en el interior dedispositivo de agarre, por lo menos uno de dichos rodillos es un rodillo motorizado conectado a un motor (16) paraarrastrar el cuerpo cilíndrico alargado (T) a la rotación cuando se está sosteniendo en el dispositivo de agarre.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/IB2010/051104.
Solicitante: Laurini Officine Meccaniche S.R.L.
Nacionalidad solicitante: Italia.
Dirección: Località Spigarolo 43011 Busseto (PR) ITALIA.
Inventor/es: LAURINI, MARCO.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B25J15/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › Cabezas de aprehensión.
- B66C1/42 B […] › B66 ELEVACION; LEVANTAMIENTO; REMOLCADO. › B66C GRUAS Y PUENTES-GRUA; ELEMENTOS O DISPOSITIVOS DE TOMA DE CARGA PARA GRUAS, PUENTES GRUA, CABRESTANTES, CABRIAS O POLIPASTOS (mecanismos de enroscadura de cuerda, de cable o de cadena, dispositivos de frenado o de parada de su uso B66D; adaptados especialmente para los reactores nucleares G21). › B66C 1/00 Elementos o dispositivos de toma de carga fijados a los mecanismos de subida, bajada o arrastre de las grúas o adaptados para ser utilizados con estos mecanismos y transmitir los esfuerzos a los objetos o grupos de objetos (medios para unir cables o cuerdas F16G 11/00). › Organos de sujeción que enganchan solamente las caras externas o internas de los objetos (para la manutención o la extracción de piezas de fundición o lingotes durante su fabricación B22D 29/00).
- F16L1/06 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F16 ELEMENTOS O CONJUNTOS DE TECNOLOGIA; MEDIDAS GENERALES PARA ASEGURAR EL BUEN FUNCIONAMIENTO DE LAS MAQUINAS O INSTALACIONES; AISLAMIENTO TERMICO EN GENERAL. › F16L TUBERIAS O TUBOS; EMPALMES U OTROS ACCESORIOS PARA TUBERIAS; SOPORTES PARA TUBOS, CABLES O CONDUCTOS PROTECTORES; MEDIOS DE AISLAMIENTO TERMICO EN GENERAL. › F16L 1/00 Colocación o recuperación de tubos; Reparación o montaje de los tubos sobre o bajo el agua. › Accesorios para ello, p. ej. piquetes de anclaje.
PDF original: ES-2426565_T3.pdf
Fragmento de la descripción:
Un dispositivo para el agarre y la manipulación de cuerpos cilíndricos alargados, tales como tuberías o similares La presente invención está relacionada con un dispositivo para el agarre y la manipulación de cuerpos cilíndricos alargados, tales como tuberías o tramos de tuberías, y particularmente tuberías de grandes dimensiones, tales como las que se usan en la construcción de oleoductos, gasoductos o similares.
El documento DE-A-2409893 describe un dispositivo que comprende una estructura de soporte con unos medios de agarre diseñados para sostener un cuerpo cilíndrico alargado en dos puntos de agarre a lo largo del eje longitudinal de dicho cuerpo, dichos medios de agarre comprenden una parte fija y dos elementos movibles de agarre articulados en dicha parte fija.
En detalle, el dispositivo según la invención es capaz de sostener una tubería o tramo de tuberías y hacerlo rotar alrededor de su eje longitudinal con el fin de ponerlo en una posición angular necesaria, luego liberarlo para que descanse en el suelo en dicha posición angular necesaria.
Más en particular, como ya se ha mencionado anteriormente, la invención está relacionada con el sector de la maquinaria que se utiliza para la instalación de tuberías, tal como para oleoductos, gasoductos o similares.
Estos sistemas de tuberías generalmente se construyen directamente en la obra mediante la soldadura de diferentes tramos de tuberías que posteriormente se colocan debajo de tierra, la disposición de las tuberías en el fondo de zanjas y luego las tuberías se cubren y se protegen.
Todas estas operaciones de construcción e instalación de tuberías necesitan la manipulación de estos elementos de tuberías particularmente pesadas y voluminosas, para lo cual se utilizan máquinas específicas, llamadas tiendetubos (pipe layer) .
Cada tramo de tuberías se realiza a partir de una plancha de metal que primero se lamina para darle un perfil circular, luego se suelda en la dirección longitudinal, paralela al eje de la tubería.
Para evitar debilitar el sistema de tuberías y para asegurar una adecuada resistencia mecánica, dichas soldaduras longitudinales en dos tramos adyacentes de tuberías siempre deben escalonarse con unos pocos grados, es decir, que nunca deben estar alineadas entre sí.
Esta es la razón por la que, cuando los tramos de tuberías se recogen de una pila o de un camión y se colocan junto a la zanja con el fin de unirlos, es necesario que se depositen en el suelo con una determinada posición angular con respecto a la tubería adyacente.
Actualmente se utilizan máquinas para el movimiento de tierras, tal como excavadoras o grúas adecuadas, para manipular estos tramos de tuberías, en las máquinas se instala una pluralidad de correas o eslingas conectadas al brazo móvil que se enrollan alrededor de la tubería de modo que se pueda elevar y posteriormente colocar en el suelo.
A pesar de que son simples y efectivos, estos sistemas de manipulación poseen varias desventajas durante el procedimiento implicado en la colocación de tramos de tuberías a lo largo de las zanjas.
De hecho, estos tramos de tuberías generalmente se recogen de una pila o de un camión y se enrollan con la correa o eslingas de una manera más o menos al azar.
Posteriormente, con el fin de colocar tramos individuales de tuberías junto a la zanja con la posición angular necesaria con respecto a la tubería adyacente (por las razones explicadas anteriormente) , se hace necesario aflojar las correas utilizadas para soportar la tubería y completar una serie de maniobras que requieren una cierta habilidad por parte del operario que está utilizando la máquina tiendetubos, mientras que por otra parte implica un riesgo considerable para los operarios sobre el terreno, que tienen que trabajar cerca de estas cargas suspendidas que pesan decenas de toneladas.
Todas estas operaciones de colocación también cuestan un cierto tiempo que da lugar, considerando la enorme cantidad de tramos de tuberías que tienen que colocarse en su posición con el fin de instalar un sistema de tuberías, a un aumento marcado del tiempo que se tarda en terminar las obras.
En este contexto, el objeto de la presente invención es un dispositivo para el agarre y la manipulación de cuerpos cilíndricos alargados, tales como tuberías o tramos de tuberías, que venzan los inconvenientes descritos anteriormente de la técnica conocida.
En particular, un objetivo de la invención es un dispositivo para el agarre y la manipulación de cuerpos cilíndricos alargados, tales como tuberías o tramos de tuberías, que permite que dicha tubería o tramo de tuberías sea agarrado automáticamente y se pueda hacer rotar alrededor de su eje longitudinal con el fin de ponerlo en la posición angular necesaria, luego se suelta con el fin de que descanse en el suelo, sin recurrir al uso de operarios que trabajan en las inmediaciones de las cargas suspendidas.
Otro objetivo de la presente invención es un dispositivo para el agarre y la manipulación de cuerpos cilíndricos alargados, tal como tuberías o tramos de tuberías, que permita una reducción considerable del tiempo que se tarda en instalar y completar un sistema de tuberías, tal como un oleoducto o gasoducto y similares.
Los objetivos indicados anteriormente se consiguen mediante un dispositivo para el agarre y la manipulación de cuerpos cilíndricos alargados (T) , tales como tuberías o tramos de tuberías que comprende una estructura de soporte con unos medios para su montaje en una máquina de movimiento de tierras, con unos medios de agarre instalados en dicha estructura de soporte que están diseñados para sostener el cuerpo cilíndrico alargado por lo menos en dos puntos de agarre a lo largo del eje longitudinal de dicho cuerpo cilíndrico alargado, dichos medios de agarre comprenden por lo menos una parte fija (5) y por lo menos un elemento movible de agarre articulado con dicha parte fija y sujeto a la acción de los medios para llevarlo desde una posición cerrada, en donde el dispositivo sostiene el cuerpo cilíndrico alargado (T) de modo que se pueda elevar y manipular, a una posición abierta, en donde el dispositivo libera el cuerpo cilíndrico alargado (T) preparado para llevar a cabo la instalación, una pluralidad de rodillos que están articulados en dicha por lo menos una parte fija (5) o en dicho por lo menos un elemento movible de agarre, dichos rodillos están diseñados para permitir la rotación de dicho cuerpo cilíndrico alargado (T) mientras dicho elemento movible de agarre está en la posición de cerrado y el dispositivo está sosteniendo el cuerpo cilíndrico alargado (T) , dichos rodillos están dispuestos con su propio eje de rotación paralelo al eje longitudinal de la tubería, y con un perfil que se extiende más allá de la forma de dicha parte fija y de dicho elemento movible de agarre para entrar en contacto con la superficie exterior del cuerpo cilíndrico alargado cuando este último está sostenido en el interior de dispositivo de agarre, por lo menos uno de dichos rodillos es un rodillo motorizado conectado a un motor para arrastrar el cuerpo cilíndrico alargado (T) a la rotación cuando se está sosteniendo en el dispositivo de agarre.
Dichos medios de agarre comprenden preferiblemente por lo menos un par de pinzas instaladas en la estructura de soporte, dichas pinzas comprenden una parte fija y por lo menos una garra, articulada en dicha parte fija y sujeta a la acción de los medios que la llevan desde una posición cerrada, en donde el dispositivo sostiene la tubería de modo que se puede elevar y manejar, a una posición abierta, en donde el dispositivo libera la tubería preparada para la instalación.
Incluso más preferiblemente, la invención implica que dichas pinzas comprenden un par de garras articuladas en dicha parte fija y sujetas a la acción de los medios que las llevan desde una posición cerrada, en donde el dispositivo sostiene la tubería de modo que se puede elevar y manejar, a una posición abierta, en donde el dispositivo libera la tubería preparada para la instalación.
Ahora se describe un ejemplo no limitativo de la presente invención con referencia a las figuras adjuntadas, en donde:
• la figura 1 es una vista lateral del dispositivo de agarre según la invención;
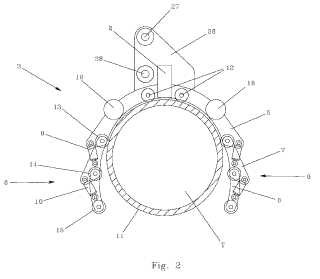
• la figura 2 es una vista frontal del dispositivo de agarre según la invención en la posición abierta;
• la figura 3 es una vista frontal del dispositivo de agarre montado en el brazo de una excavadora, en su posición cerrado y sosteniendo una tubería;
• la figura 4 es una vista frontal del dispositivo de agarre montado en el brazo de una grúa, en su posición... [Seguir leyendo]
Reivindicaciones:
1. Un dispositivo para el agarre y la manipulación de cuerpos cilíndricos alargados (T) , tales como tuberías o tramos de tuberías que comprende una estructura de soporte (2) con unos medios (26) para su montaje en una máquina de movimiento de tierras, con unos medios de agarre instalados en dicha estructura de soporte (2) que están diseñados para sostener el cuerpo cilíndrico alargado por lo menos en dos puntos de agarre a lo largo del eje longitudinal de dicho cuerpo cilíndrico alargado, dichos medios de agarre comprenden por lo menos una parte fija (5) y por lo menos un elemento movible de agarre (6) articulado con dicha parte fija y sujeto a la acción de los medios para llevarlo desde una posición cerrada, en donde el dispositivo sostiene el cuerpo cilíndrico alargado (T) de modo que se pueda elevar y manipular, a una posición abierta, en donde el dispositivo libera el cuerpo cilíndrico alargado (T) preparado para llevar a cabo la instalación, una pluralidad de rodillos (12, 13, 14, 15) que están articulados en dicha por lo menos una parte fija (5) o en dicho por lo menos un elemento movible de agarre (6) , dichos rodillos están diseñados para permitir la rotación de dicho cuerpo cilíndrico alargado (T) mientras dicho elemento movible de agarre está en la posición de cerrado y el dispositivo está sosteniendo el cuerpo cilíndrico alargado (T) , dichos rodillos (12, 13, 14, 15) están dispuestos con su eje de rotación paralelo al eje longitudinal de la tubería, y con un perfil que se extiende más allá de la forma de dicho elemento movible de agarre (6) para entrar en contacto con la superficie exterior (11) del cuerpo cilíndrico alargado (T) cuando este último está sostenido en el interior de dispositivo de agarre, por lo menos uno de dichos rodillos es un rodillo motorizado conectado a un motor (16) para arrastrar el cuerpo cilíndrico alargado (T) a la rotación cuando se está sosteniendo en el dispositivo de agarre.
2. Un dispositivo según la reivindicación 1, caracterizado porque dicho por lo menos un rodillo motorizado está conectado al motor (16) mediante unos medios flexibles de transmisión, tales como una correa o una cadena instalada en un par de poleas o piñones conectados coaxial e integralmente con dicho motor y con dicho por lo menos un rodillo motorizado.
3. Un dispositivo según las reivindicaciones 1 o 2, caracterizado porque dicho motor (16) es un motor hidráulico.
4. Un dispositivo según cualquiera de las reivindicaciones precedentes, caracterizado porque dichos medios de agarre comprenden por lo menos un par de pinzas (3, 4) instaladas en dicha estructura de soporte (2) , dichas pinzas comprenden una parte fija (5) y por lo menos una garra (6) , articulada con dicha parte fija (5) y sometida a la acción de unos medios impulsores (9, 10) que la llevan desde una posición cerrada, en donde el dispositivo sostiene el cuerpo cilíndrico alargado (T) de modo que se pueda elevar y manipular, a una posición abierta, en donde el dispositivo libera el cuerpo cilíndrico alargado (T) preparado para la instalación.
5. Un dispositivo según la reivindicación 4, caracterizado porque incluye un par de garras (6) , articuladas en dicha parte fija (5) .
6. Un dispositivo según las reivindicaciones 4 o 5, caracterizado porque cada una de dichas garras (6) está compuesta por dos sectores (7, 8) , dicho primer sector (7) está articulado en un primer extremo en la parte fija (5) y dicho segundo sector (8) está articulado en el otro extremo de dicho primer sector (7) .
7. Un dispositivo según la reivindicación 6, caracterizado porque dichos medios para mover dichas garras (6) son dos elementos de accionamiento hidráulico (9, 10) , el elemento de accionamiento (9) , que mueve el sector (7) se conecta en un extremo al elemento (5) y en el extremo opuesto a dicho sector (7) , y el elemento de accionamiento (10) , que mueve el sector (8) , se conecta en un extremo al primer sector (7) y en el extremo opuesto a dicho segundo sector (8) .
8. Un dispositivo según las reivindicaciones 1 y 7, caracterizado porque incluye por lo menos un rodillo motorizado instalado en cada garra (6) , en la parte fija (5) se instala un par de motores (16) .
9. Un dispositivo según la reivindicación 8, caracterizado porque hay por lo menos tres rodillos motorizados (13, 14, 15) en cada garra (6) .
10. Un dispositivo según la reivindicación 9, caracterizado porque dichos rodillos motorizados (13, 14, 15) se conectan entre sí mediante unos medios flexibles de transmisión, tales como cadenas o correas (41, 42) instalados en poleas o piñones conectados coaxial e integralmente con dichos rodillos motorizados.
11. Un dispositivo según cualquiera de las reivindicaciones precedentes, caracterizado porque dichos medios
(26) para el montaje de dicho dispositivo en una máquina de movimiento de tierras, una grúa o similares comprende un reborde (26) con dos asientos (27, 28) .
12. Un dispositivo según cualquiera de las reivindicaciones 8 a 10, caracterizado porque la unidad de potencia se instala en la estructura de soporte (2) para entregar aceite a presión a los motores (16) y a los elementos de accionamiento (9, 10) .
Patentes similares o relacionadas:
SISTEMA Y PROCEDIMIENTO PARA EL RECAMBIO DE REVESTIMIENTOS, CUYA CONFIGURACIÓN PERMITE RETIRAR E INTRODUCIR, EN FORMA AUTOMATIZADA, REVESTIMIENTOS DE UN MOLINO UTILIZADO PARA LA MOLIENDA DE MINERAL, del 2 de Julio de 2020, de MI ROBOTIC SOLUTIONS S.A: Un sistema y procedimiento para el recambio de revestimientos de un molino, cuya configuración permita la manipulación automatizada y robótica […]
EXTREMIDAD ROBGTICA, ESLABON DE UNA EXTREMIDAD ROBOTICA Y METODO PARA PROPORCIONAR SOPORTE A UNA EXTREMIDAD ROBOTICA, CON MOVIMIENTO ANTROPOMORFO AJUSTABLE, del 28 de Mayo de 2020, de ORTEGA CARRILLO, Hernando: Extremidad robótíca, Eslabón de una extremidad robótica y Método para proporcionar soport a una extremidad robótica, estando o no energizados, por medio […]
Procedimiento de producción de una pieza, del 13 de Mayo de 2020, de Flex-N-Gate France: Procedimiento de producción de una pieza que incluye, al menos, un elemento de refuerzo fabricado a partir de un inserto fibroso de material […]
Sistema para establecer y/o mantener el alineamiento correcto de un mecanismo de transferencia robótica, del 6 de Mayo de 2020, de BIOMERIEUX, INC.: Un sistema de alineamiento para establecer y/o mantener el alineamiento de un mecanismo automatizado de transferencia robotizada en un sistema automatizado […]
Máquina para llenar y envasar frascos, cartuchos, jeringas y similares, del 1 de Abril de 2020, de I.M.A. INDUSTRIA MACCHINE AUTOMATICHE S.P.A.: Una máquina para llenar y envasar frascos, cartuchos, jeringas y similares, que comprende una pared que separa una cámara operativa en […]
DISPOSITIVO DE ACOPLAMIENTO ENTRE UN ROBOT Y UN CABEZAL, del 26 de Marzo de 2020, de ASOCIACIÓN CENTRO TECNOLÓGICO CEIT-IK4: Dispositivo de acoplamiento entre un robot y un cabezal (H, H') que actúa sobre una superficie de trabajo (S), que comprende un cuerpo(10,10')que […]
 Dispositivo para cargar productos encuadernados, del 26 de Febrero de 2020, de Lee, Sin-Young: Un aparato para cargar productos encuadernados , que comprende:
una unidad de bastidor de soporte que proporciona una distancia para mover […]
Dispositivo para cargar productos encuadernados, del 26 de Febrero de 2020, de Lee, Sin-Young: Un aparato para cargar productos encuadernados , que comprende:
una unidad de bastidor de soporte que proporciona una distancia para mover […]
Sistema de laminado automatizado de chapas y método de colocación, del 19 de Febrero de 2020, de THE BOEING COMPANY: Un sistema para la colocación de chapas de compuesto en localizaciones preseleccionadas; que comprende: un robot ; un efector […]