Determinación de la posición y de la orientación.
Aparato para determinar una disposición relativa de un primer objeto (2) y un segundo objeto (4),
que comprende:
medios de detección en el segundo objeto (4) para detectar un haz de radiación transmitida por una fuente láser desde el primer objeto (2), teniendo el haz de radiación un perfil de haz predeterminado
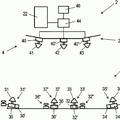
los medios de detección comprenden una pluralidad de detectores (11, 13, 15), proporcionándose cada detector en una posición diferente respectiva, conocida respecto al otro detector, de tal manera que en funcionamiento cada detector tiene una visión diferente de una fuente de la radiación (10) en el primer objeto (2), estando cada detector configurado para producir una señal de detección correspondiente en respuesta a la radiación,
medios de procesamiento configurados para procesar las señales de detección juntas dependiendo de la posición de cada detector respecto al otro detector, y para explotar al menos una característica de la señal de detección respectiva recibida en cada detector para determinar una posición relativa de cada detector respecto al haz, caracterizado por que la al menos una característica es representativa de la potencia de la radiación recibida, el perfil del haz predeterminado es un perfil de la distribución de energía a través del haz como una función de la posición y la posición relativa de cada detector se obtiene comparando las potencias recibidas en cada detector.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E07107090.
Solicitante: ALCATEL ALENIA SPACE ITALIA S.P.A.
Nacionalidad solicitante: Italia.
Dirección: VIA SACCOMURO 24 00131 ROME ITALIA.
Inventor/es: CESARE,STEFANO, PISANI,MARCO.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S3/783 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 3/00 Localizadores de dirección para la determinación de la dirección desde la que se reciben ondas infrasonoras, sonoras, ultrasonoras o electromagnéticas o emisiones de partículas, que no tienen contenido direccional significativo (establecimiento de la posición mediante la coordinación de una pluralidad de determinaciones de dirección o de líneas de posición G01S 5/00). › que utilizan la comparación de la amplitud de señales provenientes de detectores o sistemas detectores estáticos.
- G01S5/16 G01S […] › G01S 5/00 Establecimiento de la posición mediante la coordinación de dos o más determinaciones de dirección o de líneas de posición; Establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia. › que utilizan ondas electromagnéticas que no sean ondas de radio.
PDF original: ES-2529185_T3.pdf
Fragmento de la descripción:
Determinación de la posición y de la orientación La presente invención se refiere a un aparato y a un método para determinar la disposición relativa de una pluralidad de objetos. En particular, la invención se refiere a la determinación de la posición relativa y la orientación de dos cuerpos, por ejemplo, dos satélites en una disposición de vuelo en formación.
En cualquier misión espacial basada en una formación de dos o más satélites, es necesario medir la posición relativa y la altitud de cada par de satélites para conocer y/o controlar la geometría de la formación. Los términos altitud y orientación términos utilizan indistintamente en este documento.
Un sistema conocido para la medición de la distancia relativa de un par de satélites utiliza láser que varía basado en el tiempo de medición de vuelo. La precisión que se puede alcanzar es del orden de un milímetro. La precisión de la medición de distancia proporcionada por un sistema de este tipo se puede mejorar usando un interferómetro alimentado por radiación láser que tiene una longitud de onda sintética creada por la superposición de dos haces láser con frecuencias ligeramente diferentes. Si la longitud de onda sintética es más larga que la precisión de medición proporcionada por el tiempo de la técnica de vuelo, entonces el interferómetro de longitud de onda sintética puede mejorar la precisión de medición de la distancia al orden de algunos micrómetros.
Sin embargo, tales sistemas conocidos no miden la posición a lo largo de los ejes transversales a la línea que une los dos satélites ni la altitud relativa de los dos satélites. Las medidas de altitud relativa usualmente se obtienen utilizando rastreadores de estrellas instalados en los dos satélites. Por lo tanto, se requieren dos sistemas de medición separados, uno para medir la distancia y otro para la medición de la orientación. Además, el uso de rastreadores de estrellas estándar no proporciona una precisión de medición en el nivel de 1 segundo de arco, y también requiere que una medición separada se realiza en cada satélite y que al menos uno de los satélites transmite los resultados de la medición al otro, de modo que los resultados obtenidos por los dos satélites se pueden comparar y se puede calcular la orientación relativa de los satélites.
También se sabe cómo medir la posición relativa y la altitud de dos satélites durante un procedimiento de encuentro o de acoplamiento. Normalmente, se proporcionan unos sensores de encuentro o de acoplamiento, en el que una cámara en un primer satélite mira un patrón de marcadores de referencia (retroreflectores o luces) proporcionadas en un segundo satélite. Una idea similar se divulga en el documento EP 0 537 623. El sistema se basa en el patrón, la posición y la separación de los marcadores de referencia en el segundo satélite que se conoce. Al comparar el patrón, la posición y la separación de la imagen de los marcadores de referencia que aparecen en el campo de visión de la cámara en el primer satélite con el patrón, la posición y la separación conocidos de los marcadores de referencia en el segundo satélite, se puede calcular la orientación relativa y la separación de los dos satélites. Este sistema tiene un rango de trabajo limitado, normalmente de 100 metros o menos, y proporciona una exactitud de medición que está lejos de lo que se necesita para una misión de vuelo en formación típica.
Es un objetivo de la presente invención, como se define mediante las reivindicaciones, proporcionar un aparato y un método mejorado, o al menos alternativo, para medir la disposición de un primer cuerpo respecto a un segundo cuerpo, por ejemplo, un primer satélite respecto a un segundo satélite. En ciertos aspectos, la invención proporciona la medición de la posición en 3D de un primer satélite respecto a un segundo satélite, y, en particular, la medición de los dos ángulos de rotación que definen la orientación de uno respecto a otro satélite alrededor de los dos ejes ortogonales a la línea de que une los dos satélites. En algunos aspectos de la invención, el ángulo de rotación alrededor de la línea que une los dos satélites se determina mediante el uso adicional de analizadores de polarización, aunque la determinación de ese ángulo es por lo general menos crítica para aplicaciones que implican formaciones de satélites que determinan los otros parámetros que representan la posición relativa y la orientación de los dos satélites.
En ciertos aspectos preferidos de la invención, la posición relativa y la altitud de dos satélites en vuelo en formación se puede determinar con una precisión de al menos:
â?¢ 1 mm a lo largo de la línea que une los dos satélites, para una distancia relativa de ~ 100 m.
â?¢ 0, 1 mm a lo largo de los ejes transversales a la línea que une los dos satélites
â?¢ 1 segundo de arco alrededor de los ejes transversales a la línea que une los dos satélites
En una primer aspecto independiente se proporciona un aparato para determinar una disposición relativa de un primera satélite y un segundo satélite, que comprende medios de detección en el segundo satélite para detectar la radiación transmitida desde el primer satélite, caracterizado por que los medios de detección comprenden una pluralidad de detectores, proporcionándose cada detector en una posición diferente respectiva conocida respecto al otro detector, de tal manera que en funcionamiento cada detector tiene una visión diferente de una fuente de radiación en el primer satélite, estando cada detector configurado para producir una respectiva señal de detección en respuesta a la radiación recibida desde la fuente.
Preferiblemente, el aparato comprende además medios de procesamiento configurados para procesar las señales de detección juntas dependiendo de la posición de cada detector respecto al otro detector.
En funcionamiento, la señal de detección recibida para cada detector respecto a la señal de detección obtenida para el o cada otro detector depende normalmente de la posición de los detectores entre sí, y de la disposición relativa del primer satélite y del segundo satélite. La posición de los detectores entre sí se conoce, y así la disposición relativa del primer satélite y del segundo satélite se puede determinar de manera eficiente mediante el procesamiento de las señales de detección juntas, teniendo en cuenta la posición de cada detector respecto al otro detector.
El procesamiento de las señales juntas puede comprender comparar directamente, combinar, ajustar a un modelo o de otra manera procesar juntas las señales de detección dependiendo de la posición de cada detector respecto al otro detector. Alternativamente, el procesamiento de las señales juntas puede comprender la realización de un proceso inicial o conjunto de procesos en la señal de detección para cada detector separado para producir una salida respectiva y luego combinar, comparar, ajustar a un modelo o procesar de otra manera juntas las salidas dependiendo de la posición de cada detector respecto al otro detector. El proceso inicial o conjunto de procesos pueden incluir, por ejemplo, uno o más de demodulación, promediado de la señal, y el ajuste a un modelo. Cada salida puede comprender, por ejemplo, el valor o valores de uno o más parámetros. Alternativa o adicionalmente, el procesamiento de detección de señales juntas puede comprender el procesamiento de la señal de detección de uno de los detectores y luego, el uso los resultados de ese procesamiento en el procesamiento de las señales de detección para el o cada otro detector, dependiendo de la posición del o de cada otro detector respecto a ese uno de los detectores.
Preferiblemente, los medios de procesamiento están configurados para procesar la señal de detección respectiva para cada detector en función de la posición del detector respecto a la posición del o de cada otro detector.
Los medios de procesamiento están configurados preferiblemente para obtener una medición de la disposición relativa del primer satélite y del segundo satélite desde el procesamiento conjunto de las señales de detección. La medición de la disposición relativa puede comprender al menos uno de una distancia relativa de separación del primer satélite y del segundo satélite, una posición del primer satélite con relación al segundo satélite, y la orientación del primer satélite con relación al segundo satélite. Preferiblemente, en funcionamiento, la posición relativa del primer satélite y del segundo satélite se define mediante un sistema de coordenadas cartesiano con ejes ortogonales, x y y z, centrados en el primer satélite o en el segundo satélite. Preferiblemente,... [Seguir leyendo]
Reivindicaciones:
1. Aparato para determinar una disposición relativa de un primer objeto (2) y un segundo objeto (4) , que comprende: medios de detección en el segundo objeto (4) para detectar un haz de radiación transmitida por una fuente láser desde el primer objeto (2) , teniendo el haz de radiación un perfil de haz predeterminado los medios de detección comprenden una pluralidad de detectores (11, 13, 15) , proporcionándose cada detector en una posición diferente respectiva, conocida respecto al otro detector, de tal manera que en funcionamiento cada detector tiene una visión diferente de una fuente de la radiación (10) en el primer objeto (2) , estando cada detector configurado para producir una señal de detección correspondiente en respuesta a la radiación, medios de procesamiento configurados para procesar las señales de detección juntas dependiendo de la posición de cada detector respecto al otro detector, y para explotar al menos una característica de la señal de detección respectiva recibida en cada detector para determinar una posición relativa de cada detector respecto al haz, caracterizado por que la al menos una característica es representativa de la potencia de la radiación recibida, el perfil del haz predeterminado es un perfil de la distribución de energía a través del haz como una función de la posición y la posición relativa de cada detector se obtiene comparando las potencias recibidas en cada detector.
2. Aparato de acuerdo con la reivindicación 1, en el que el perfil de haz predeterminado tiene la forma de una distribución gaussiana.
3. Aparato de acuerdo con cualquier reivindicación anterior, en el que los medios de detección comprenden al menos tres detectores.
4. Aparato de acuerdo con cualquier reivindicación anterior, en el que los detectores están dispuestos en una disposición simétrica.
5. Aparato de acuerdo con la reivindicación 3, en el que los medios de detección comprenden tres detectores, estando cada uno de los detectores en un vértice respectivo de un triángulo equilátero.
6. Aparato de acuerdo con cualquiera de las reivindicaciones anteriores, en el que los medios de procesamiento están configurados para determinar, para cada uno de los detectores, al menos un parámetro de detección representativo de la posición de la radiación recibida desde la fuente de radiación en el campo de visión del detector, y para procesar los parámetros de detección dependiendo de la posición relativa de los detectores.
7. Aparato de acuerdo con la reivindicación 6, en el que el al menos un parámetro de detección es representativo de al menos una coordenada angular o al menos una coordenada lineal.
8. Aparato de acuerdo con las reivindicaciones 6 o 7, en el que los medios de procesamiento están configurados para promediar los valores del, o de cada, al menos un parámetro a través de los detectores, para obtener así una medida de la disposición relativa del primer objeto y del segundo objeto.
9. Aparato de acuerdo con las reivindicaciones 6 o 7, en el que, para cada detector, i, el o cada parámetro de detección es representativo de uno respectivo de un ángulo de azimut αi entre la trayectoria de la radiación de la fuente de radiación y un eje de puntería del detector y un ángulo co-latitud βi entre la trayectoria de la radiación de la fuente de radiación y un eje perpendicular al eje de puntería del detector.
10. Aparato de acuerdo con la reivindicación 9, en el que los medios de procesamiento están configurados para determinar para cada detector, i, un ángulo de azimut αi entre la trayectoria de la radiación procedente de la fuente de radiación y un eje de puntería del detector, y los medios de procesamiento están configurados para promediar los ángulos de azimut obtenidos a partir de los detectores.
11. Aparato de acuerdo con las reivindicaciones 9 o 10, en el que los medios de procesamiento están configurados para determinar, para cada detector i, un ángulo de co-latitud βi entre la trayectoria de la radiación de la fuente de radiación y un eje perpendicular al eje de puntería del detector, y los medios de procesamiento están configurados para promediar los ángulos de co-latitud βi obtenidos desde los detectores.
12. Aparato de acuerdo con las reivindicaciones 6 o 7, en el que los medios de procesamiento están configurados para resolver numéricamente un conjunto de ecuaciones que vinculan los parámetros de detección para cada uno de los detectores con las tres coordenadas angulares y las tres lineales que definen la posición relativa y la orientación del primer y segundo objetos, para obtener los valores de al menos una de las coordenadas lineales y angulares.
13. Aparato de acuerdo con la reivindicación 12, en el que los medios de procesamiento están configurados para determinar, para cada detector, i, un ángulo de co-latitud βi entre la trayectoria de la radiación de la fuente de radiación y un eje de puntería del detector, y un ángulo de azimut αi entre la trayectoria de la radiación de la fuente de radiación y un eje perpendicular al eje de puntería del detector, y los medios de procesamiento están configurados para resolver numéricamente el conjunto de ecuaciones (2) a (7) como se indican en el presente
documento.
14. Aparato de acuerdo con cualquier reivindicación anterior, que incluye una fuente de radiación en el primer satélite para la transmisión de la radiación desde el primer objeto al segundo objeto, medios para la modulación de la radiación y medios para determinar la modulación de la radiación en función de la señal de detección respectiva recibida en al menos uno de los detectores.
15. Aparato de acuerdo con la reivindicación 14, en el que los medios para determinar la modulación están configurados para combinar las señales de detección recibidas en los detectores para producir una señal combinada y para determinar la modulación en función de la señal combinada.
16. Aparato de acuerdo con las reivindicaciones 14 o 15, en el que los medios de detección están configurados para demodular las señales de detección detectadas en los detectores dependiendo de la modulación determinada por los medios de determinación de modulación.
17. Aparato de acuerdo con cualquier reivindicación anterior, que comprende además medios para determinar la polarización de la radiación recibida en los medios de detección y para la determinación de una orientación relativa de los dos objetos dependiendo de la polarización.
18. Aparato de acuerdo con cualquier reivindicación anterior, en el que los dos objetos (2, 4) son dos satélites.
19. Un método de determinar una disposición relativa de un primer objeto (2) y un segundo objeto (4) , que comprende: transmitir radiación desde una fuente de radiación láser (10) en el primer objeto (2) al segundo objeto (4) , teniendo el haz de radiación un perfil de haz de predeterminado; y detectar la radiación en el segundo satélite (4) , caracterizado por: proporcionar una pluralidad de detectores (11, 13, 15) , proporcionándose cada detector en una posición diferente respectiva conocida respecto al otro detector, de manera que cada detector tiene una visión diferente de la fuente de radiación (10) , estando configurado cada detector para producir una señal de detección correspondiente en respuesta a la radiación recibida de la fuente (10) ; y procesar las señales de detección juntas dependiendo de la posición de cada detector respecto al otro detector y explotar al menos una característica de la señal de detección respectiva recibida en cada detector para determinar una posición relativa de cada detector respecto al haz, caracterizado por que la al menos una característica es representativa de la potencia de la radiación recibida, y el perfil del haz predeterminado es un perfil de distribución de energía a través del haz como una función de la posición y de la posición relativa de cada detector que se obtienen comparando las potencias recibidas en cada detector.
Patentes similares o relacionadas:
 Aparato automáticamente desplazable y procedimiento de guiado de tal aparato para dirigirlo a un punto de destino, del 29 de Julio de 2020, de VORWERK & CO. INTERHOLDING GMBH: Aparato automáticamente desplazable , especialmente aparato de limpieza para limpiar un suelo , tal como un robot de aspiración y/o barrido, con uno o […]
Aparato automáticamente desplazable y procedimiento de guiado de tal aparato para dirigirlo a un punto de destino, del 29 de Julio de 2020, de VORWERK & CO. INTERHOLDING GMBH: Aparato automáticamente desplazable , especialmente aparato de limpieza para limpiar un suelo , tal como un robot de aspiración y/o barrido, con uno o […]
Sistema de detección de localización de fuente de luz, del 6 de Mayo de 2020, de Thales Defense & Security, Inc: Un sistema para rastrear una orientación de un primer objeto , comprendiendo el sistema: un dispositivo de emisión de luz situado con respecto […]
Procedimiento y dispositivo para determinar la distancia entre un receptor aéreo y un emisor terrestre fijo, del 19 de Junio de 2019, de MBDA FRANCE: Procedimiento para la determinación continua de la distancia entre un receptor aéreo (R) móvil de manera conocida en una trayectoria conocida (T) y un […]
SISTEMA DE POSICIONAMIENTO, del 10 de Enero de 2019, de IBAÑEZ CRUZ, Javier: Especialmente concebido para espacios cubiertos de grandes dimensiones, está constituido a partir de una serie de módulos espaciales estáticos convenientemente […]
SISTEMA INFO-OPTICO PARA LA MONITORIZACIÓN DEL MOVIMIENTO DE ROEDORES DE LABORATORIO, del 10 de Enero de 2019, de UNIVERSIDAD DE MURCIA: Sistema info-óptico para la monitorización del movimiento de roedores de laboratorio. La presente invención consiste en un sistema info-óptico diseñado […]
 Sistema de navegación de campo próximo, del 31 de Octubre de 2018, de Airbus Defence and Space GmbH: Sistema de navegación de campo próximo que comprende un primer objeto y un segundo objeto, navegando el primer objeto en relación con el segundo objeto,
[…]
Sistema de navegación de campo próximo, del 31 de Octubre de 2018, de Airbus Defence and Space GmbH: Sistema de navegación de campo próximo que comprende un primer objeto y un segundo objeto, navegando el primer objeto en relación con el segundo objeto,
[…]
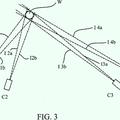 Medición óptica de hilo aéreo, del 27 de Septiembre de 2018, de JRB ENGINEERING PTY LTD: Método de medición óptica de una ubicación de uno o más objetos (W1-W6) que comprende:
obtener datos (22b) de imagen estereoscópica para el […]
Medición óptica de hilo aéreo, del 27 de Septiembre de 2018, de JRB ENGINEERING PTY LTD: Método de medición óptica de una ubicación de uno o más objetos (W1-W6) que comprende:
obtener datos (22b) de imagen estereoscópica para el […]
SISTEMA INTERIOR DE LOCALIZACION EN ENTORNOS METÁLICOS., del 27 de Junio de 2018, de SKYLIFE ENGINEERING, S.L: Sistema interior de localización en entornos metálicos basado en un sistema de posicionamiento destinado a entornos donde la recepción de señales […]