DETECTOR DE POSICIÓN ANGULAR.
El detector de posición angular comprende un cuerpo principal (1),
un cuerpo giratorio (2) montado para girar respecto al cuerpo principal (1) alrededor de un eje de giro (E) geométrico, un imán permanente (3) fijado al cuerpo giratorio (2), y un circuito electrónico que incluye un sensor (5) fijado al cuerpo principal (1) y dispuesto para detectar variaciones en el campo magnético producido por el imán permanente (3) al girar el cuerpo giratorio (2) respecto al cuerpo principal (1). El cuerpo principal (1) tiene una concavidad (6) que abarca un arco de circunferencia respecto al eje de giro (E) y un elemento de guía circular (7) coaxial con el eje de giro (E) situado adyacente a la concavidad (6). El cuerpo giratorio (2) está acoplado al elemento de guía circular (7) de manera que puede deslizar respecto al mismo a lo largo de un arco de circunferencia de detección predeterminado.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201230601.
Solicitante: PIHER SENSORS & CONTROLS. SA.
Nacionalidad solicitante: España.
Inventor/es: BUENO PALACIOS,CESAR.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01B7/30 FISICA. › G01 METROLOGIA; ENSAYOS. › G01B MEDIDA DE LA LONGITUD, ESPESOR O DIMENSIONES LINEALES ANALOGAS; MEDIDA DE ANGULOS; MEDIDA DE AREAS; MEDIDA DE IRREGULARIDADES DE SUPERFICIES O CONTORNOS. › G01B 7/00 Disposiciones de medida caracterizadas por la utilización de medios eléctricos o magnéticos. › para la medida de ángulos o conicidades; para ensayar la alineación de ejes.
Fragmento de la descripción:
DETECTOR DE POSICIÓN ANGULAR
Campo de la técnica La presente invención concierne en general a un detector de posición angular, y más en particular a un detector de posición angular configurado para ser acoplado radialmente a un árbol rotativo que gire en ambas direcciones un ángulo menor que media circunferencia.
Antecedentes de la invención
Se conocen detectores de posición angular que comprende un cuerpo principal previsto para ser fijado a una estructura de un mecanismo y un cuerpo giratorio montado para girar respecto a dicho cuerpo principal alrededor de un eje de giro geométrico. El cuerpo giratorio lleva fijado un imán permanente y en el cuerpo principal está instalado un circuito electrónico que incluye un sensor configurado y dispuesto para detectar variaciones en el campo magnético producido por dicho imán permanente al girar el cuerpo giratorio respecto al cuerpo principal.
El documento ES 1069548 da a conocer un detector de posición angular del tipo arriba descrito, en el que el cuerpo giratorio tiene una forma anular y está instalado en una abertura pasante formada en el cuerpo principal. El cuerpo giratorio anular tiene una superficie interior adaptada para acoplarse ajustadamente sobre el árbol rotativo sin posibilidad de giro relativo entre ambos, y el árbol rotativo insertado en el cuerpo giratorio se extiende a través de la abertura pasante del cuerpo principal. Un inconveniente de este detector de posición angular es el árbol rotativo necesita tener un extremo libre accesible para que el detector de posición angular pueda ser instalado o desinstalado axialmente, o de lo contrario el árbol rotativo debe estar desmontado para poder instalar o desinstalar el detector de posición angular.
Exposición de la invención
La presente invención contribuye a mitigar el anterior y otros inconvenientes aportando un detector de posición angular que comprende un cuerpo principal, un cuerpo giratorio montado para girar respecto a dicho cuerpo principal alrededor de un eje de giro geométrico, un imán permanente fijado a dicho cuerpo giratorio, y un circuito electrónico que incluye un sensor fijado a dicho cuerpo principal, donde el mencionado sensor está configurado y dispuesto para detectar variaciones en el campo magnético producido por dicho imán permanente al girar el cuerpo giratorio respecto al cuerpo principal. El cuerpo principal comprende una concavidad que abarca un arco de circunferencia respecto a dicho eje de giro y un elemento de guía circular coaxial con el eje de giro y situado adyacente a dicha concavidad, y el cuerpo giratorio está acoplado a dicho elemento de guía circular de manera que puede deslizar respecto al mismo a lo largo de un arco de circunferencia de detección predeterminado.
El cuerpo principal puede ser fijado mediante unos medios de fijación a una estructura en una posición en la que el elemento de guía circular es coaxial con un árbol rotativo montado en dicha estructura, donde dicho árbol rotativo es coaxial con el eje de giro. El cuerpo giratorio tiene un elemento de acoplamiento enfrentado a la concavidad, el cual se acopla a un correspondiente elemento de arrastre de dicho árbol rotativo, de manera que cuando el árbol rotativo gira, éste arrastra al cuerpo giratorio, lo cual ocasiona una variación en el campo magnético producido por el imán permanente que es detectada por el sensor, y el sensor genera una señal representativa del ángulo girado por el árbol rotativo.
Con esta configuración, cuando el cuerpo principal no está fijado a la estructura, el detector de posición angular de la presente invención puede ser acoplado y desacoplado del árbol rotativo mediante un movimiento en la posición radial aunque el árbol rotativo no tenga sus extremos libres y sin necesidad de desmontar el árbol rotativo. Una vez el elemento de acoplamiento del cuerpo giratorio está acoplado radialmente al elemento de arrastre del árbol rotativo y el cuerpo principal está fijado a la estructura, el detector de posición angular está en orden de funcionamiento.
En una realización, el cuerpo giratorio tiene una forma arqueada coaxial con el eje de giro y abarca un arco de circunferencia mayor que dicho arco de circunferencia de detección a lo largo de cual puede deslizar el cuerpo giratorio. El imán permanente tiene asimismo una forma arqueada coaxial con el eje de giro y abarca un arco de circunferencia igual o ligeramente menor que dicho arco de circunferencia abarcado por
el cuerpo giratorio. El sensor está situado en el cuerpo principal en una posición que coincide con el centro del arco de circunferencia de detección a lo largo de cual puede deslizar el cuerpo giratorio. El cuerpo principal y el cuerpo giratorio tienen respectivos elementos de tope que limitan el deslizamiento del cuerpo giratorio respecto al cuerpo principal a dicho arco de circunferencia de detección, de manera que el cuerpo giratorio no puede escapar del cuerpo principal.
El cuerpo principal tiene un alojamiento en el que se aloja una placa de circuito impreso que soporta dicho circuito electrónico con el sensor, el cual está basado en un detector de efecto hall, y este detector de efecto hall preferiblemente incorporado en un circuito integrado conectado al circuito electrónico. Además, la mencionada placa de circuito impreso está preferiblemente unida a un cuerpo sobremoldeado de manera que al menos parte del circuito electrónico incluyendo el sensor está embebido en dicho cuerpo sobremoldeado. Opcionalmente, el cuerpo sobremoldeado está recubierto al menos en parte por un apantallamiento. Como es habitual, la placa de circuito impreso tiene una pluralidad de terminales conectados a unos respectivos hilos conductores envueltos en una funda formando en un cable de múltiples hilos que sale al exterior del cuerpo principal a través de una abertura en comunicación con el alojamiento donde se encuentra la placa de circuito impreso.
Breve descripción de los dibujos Las anteriores y otras características y ventajas resultarán más evidentes a partir de la siguiente descripción de unos ejemplos de realización con referencia a los dibujos adjuntos, en los que:
la Fig. 1 es una vista en perspectiva de un detector de posición angular de acuerdo con una primera realización de la presente invención mostrando su lado superior;
la Fig. 2 es una vista en perspectiva del detector de posición angular de la Fig. 1 mostrando su lado inferior;
la Fig. 3 es una vista en perspectiva de un cuerpo giratorio del detector de posición angular mostrando su lado superior;
la Fig. 4 es una vista en planta superior del detector de posición angular;
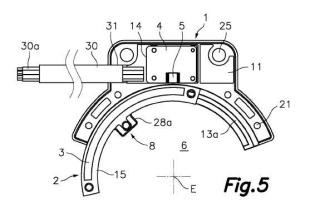
la Fig. 5 es una vista en planta superior del detector de posición angular con una tapa de un cuerpo principal y una tapa del cuerpo giratorio retiradas;
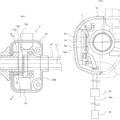
la Fig. 6 es una vista en planta superior del detector de posición angular en situación operativa en relación con una estructura y un árbol rotativo instalado en dicha estructura;
la Fig. 7 es una vista en sección transversal tomada por el plano VII-VII de la Fig. 4;
la Fig. 8 es una vista en sección transversal tomada por el plano VIII-VIII de la Fig. 4;
la Fig. 9 es una vista en perspectiva de un detector de posición angular de acuerdo con una segunda realización de la presente invención;
la Fig. 10 es una vista en perspectiva de un detector de posición angular de acuerdo con una tercera realización de la presente invención; y
la Fig. 11 es una vista en perspectiva de un detector de posición angular de acuerdo con una cuarta realización adicional de la presente invención.
Descripción detallada de unos ejemplos de realización Haciendo en primer lugar referencia a las Figs. 1 a 8, en ellas se muestra un detector de posición angular de acuerdo con una primera realización de la presente invención, el cual comprende un cuerpo principal 1 y un cuerpo giratorio 2 montado de manera que puede girar respecto a dicho cuerpo principal 1 alrededor de un eje de giro E geométrico separado del detector de posición angular. El cuerpo principal 1 comprende una concavidad 6 arqueada que tiene su centro en dicho eje de giro E y que abarca un arco de circunferencia respecto al eje de giro E. El cuerpo principal 1 tiene además un elemento de guía circular 7 coaxial con el eje de giro E y situado adyacente a dicha concavidad 6, y el cuerpo giratorio 2 está acoplado a dicho elemento de guía circular 7 de manera que puede deslizar respecto al mismo a lo largo de un arco
de circunferencia de detección predeterminado. El cuerpo giratorio 2 tiene también una forma arqueada coaxial con el eje de giro E y abarca un arco de circunferencia mayor que dicho arco...
Reivindicaciones:
1. Detector de posición angular, del tipo que comprende un cuerpo principal (1) , un cuerpo giratorio (2) montado para girar respecto a dicho cuerpo principal (1) alrededor de un eje de giro (E) geométrico, un imán permanente (3) fijado a dicho cuerpo giratorio (2) , y un circuito electrónico que incluye un sensor (5) fijado a dicho cuerpo principal (1) , donde dicho sensor (5) está configurado y dispuesto para detectar variaciones en el campo magnético producido por dicho imán permanente (3) al girar el cuerpo giratorio (2) respecto al cuerpo principal (1) , caracterizado porque el cuerpo principal (1) comprende una concavidad
(6) que abarca un arco de circunferencia respecto a dicho eje de giro (E) y un elemento de guía circular (7) coaxial con el eje de giro (E) y situado adyacente a dicha concavidad (6) , y el cuerpo giratorio (2) está acoplado a dicho elemento de guía circular (7) de manera que puede deslizar respecto al mismo a lo largo de un arco de circunferencia de detección predeterminado.
2. Detector de posición angular según la reivindicación 1, caracterizado porque el cuerpo giratorio (2) tiene una forma arqueada coaxial con el eje de giro (E) y abarca un arco de circunferencia mayor que dicho arco de circunferencia de detección a lo largo de cual puede deslizar el cuerpo giratorio (2) , y el imán permanente (3) tiene una forma arqueada coaxial con el eje de giro (E) y abarca un arco de circunferencia igual o ligeramente menor que dicho arco de circunferencia abarcado por el cuerpo giratorio (2) .
3. Detector de posición angular según la reivindicación 2, caracterizado porque dicho sensor (5) está situado en el cuerpo principal (1) en el centro del arco de circunferencia de detección a lo largo de cual puede deslizar el cuerpo giratorio (2) .
4. Detector de posición angular según la reivindicación 1, 2 o 3, caracterizado porque el cuerpo principal
(1) y el cuerpo giratorio (2) tienen respectivos elementos de tope (9, 10) que limitan el deslizamiento del cuerpo giratorio (2) respecto al cuerpo principal (1) a dicho arco de circunferencia de detección.
5. Detector de posición angular según una de las reivindicaciones precedentes, caracterizado porque el cuerpo principal (1) comprende una base de cuerpo principal (11) y una tapa de cuerpo principal (12) fijadas la una a la otra, donde dicha base de cuerpo principal (11) define un primer nervio de guía (13a) y un alojamiento (14) en el que se aloja una placa de circuito impreso (4) que soporta dicho circuito electrónico con el sensor (5) , y dicha tapa de cuerpo principal (12) cierra dicho alojamiento (14) y define un segundo nervio de guía (13b) enfrentado a dicho primer nervio de guía (13a) de manera que dichos primer y segundo nervios de guía (13a, 13b) forman el elemento de guía circular (7) .
6. Detector de posición angular según la reivindicación 5, caracterizado porque el cuerpo giratorio (2) comprende una base de cuerpo giratorio (15) y una tapa de cuerpo giratorio (16) fijadas la una a la otra, donde dicha base de cuerpo giratorio (15) define una primera ranura de guía (17a) y un alojamiento (18) en el que se aloja el imán permanente (3) , y dicha tapa de cuerpo giratorio (16) cierra dicho alojamiento (18) y define una segunda ranura de guía (17b) opuesta a dicha primera ranura de guía (17a) , donde dichas primera y segunda ranuras de guía (17a, 17b) se acoplan con dichos primer y segundo nervios de guía (13a, 13b) del elemento de guía circular (7) del cuerpo principal (1) .
7. Detector de posición angular según la reivindicación 5, caracterizado porque dicha placa de circuito impreso (4) está unida a un cuerpo sobremoldeado (24) y al menos parte del circuito electrónico incluyendo el sensor (5) está embebido en dicho cuerpo sobremoldeado (24) .
8. Detector de posición angular según la reivindicación 1, caracterizado porque el cuerpo sobremoldeado (24) está recubierto al menos en parte por un apantallamiento (29) .
9. Detector de posición angular según la reivindicación 1, caracterizado porque el sensor (5) está basado en un detector de efecto hall.
10. Detector de posición angular según la reivindicación 9, caracterizado porque dicho detector de efecto hall está incorporado en un circuito integrado conectado al circuito electrónico.
11. Detector de posición angular según la reivindicación 5, caracterizado porque la placa de circuito impreso (4) tiene una pluralidad de terminales conectados a unos respectivos hilos conductores (30a) envueltos en una funda formando en un cable de múltiples hilos (30) que sale al exterior del cuerpo principal (1) a través de una abertura (31) en comunicación con el alojamiento (14) .
12. Detector de posición angular según una cualquiera de las reivindicaciones precedentes, caracterizado porque el cuerpo principal (1) incluye unos medios de fijación mediante los cuales el cuerpo principal (1) es fijado a una estructura (50) en una posición en la que el elemento de guía circular (7) es coaxial con un árbol rotativo (51) coaxial con el eje de giro (E) montado en dicha estructura (50) , y el cuerpo giratorio (2) tiene un elemento de acoplamiento (8) enfrentado a la concavidad (6) y que se acopla en un correspondiente elemento de arrastre (52) de dicho árbol rotativo (51) .
Patentes similares o relacionadas:
 Dispositivo de detección de posición relativa, sensor de posición del acelerador y vehículo, del 29 de Enero de 2020, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Un dispositivo de detección de posición relativa que comprende una parte de imán permanente y un sensor magnético que están dispuestos para ser desplazables […]
Dispositivo de detección de posición relativa, sensor de posición del acelerador y vehículo, del 29 de Enero de 2020, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Un dispositivo de detección de posición relativa que comprende una parte de imán permanente y un sensor magnético que están dispuestos para ser desplazables […]
SISTEMA SENSOR DE POSICION, del 22 de Enero de 2020, de PIHER SENSORS & CONTROLS, S.A: 1. Sistema sensor de posición de tipo inductivo para motores, comprendiendo el sistema sensor un sensor que comprende una bobina inductora y una bobina pasiva, […]
Aparato de detección de la posición del polo magnético para máquinas síncronas, del 3 de Abril de 2019, de MITSUBISHI ELECTRIC CORPORATION: Un aparato de detección de la posición del polo magnético para máquinas síncronas, que comprende: - un medio de circuito , para convertir […]
Dispositivo de detección de ángulo de rotación absoluto de múltiples vueltas y método para la detección de ángulo de rotación absoluto, del 31 de Mayo de 2017, de Oriental Motor Co., Ltd: Un aparato de detección de ángulo de rotación de múltiples vueltas que comprende: un engranaje de árbol motor (10b) montado sobre un árbol motor (10a); un primer […]
Dispositivo para detectar ángulos de rotación absolutos de rotación múltiple y método para detectar su ángulo de rotación, del 8 de Marzo de 2017, de Oriental Motor Co., Ltd: Un dispositivo de detección de ángulo de rotación para detectar un ángulo de rotación absoluto de un primer árbol giratorio , que comprende: […]
Dispositivo para detectar ángulos de rotación absolutos de rotación múltiple, y método para detectar los mismos, del 19 de Octubre de 2016, de Oriental Motor Co., Ltd: Un dispositivo para calcular un ángulo de rotación absoluto de rotación múltiple, que comprende: un mecanismo de transmisión adaptado para transmitir una revolución […]
Dispositivo para detectar el ángulo de rotación de un eje de dirección, del 10 de Agosto de 2016, de KAYABA INDUSTRY CO., LTD.: Dispositivo de deteccion del angulo de rotacion del eje de direccion que detecta un angulo de rotacion de un eje de direccion que gira al accionar […]
 Captador de posición absoluto y multi-periódico, del 1 de Febrero de 2016, de Moving Magnet Technologies (MMT): Captador magnético de posición (A), que incluye al menos una unidad imantada , una primera sonda magnetosensible y una segunda sonda […]
Captador de posición absoluto y multi-periódico, del 1 de Febrero de 2016, de Moving Magnet Technologies (MMT): Captador magnético de posición (A), que incluye al menos una unidad imantada , una primera sonda magnetosensible y una segunda sonda […]