Aparato y métodos para control de un vehículo.
Un método para hacer la transición de un vehículo desde un estado estáticamente estable a un estado dinámicamente balanceado,
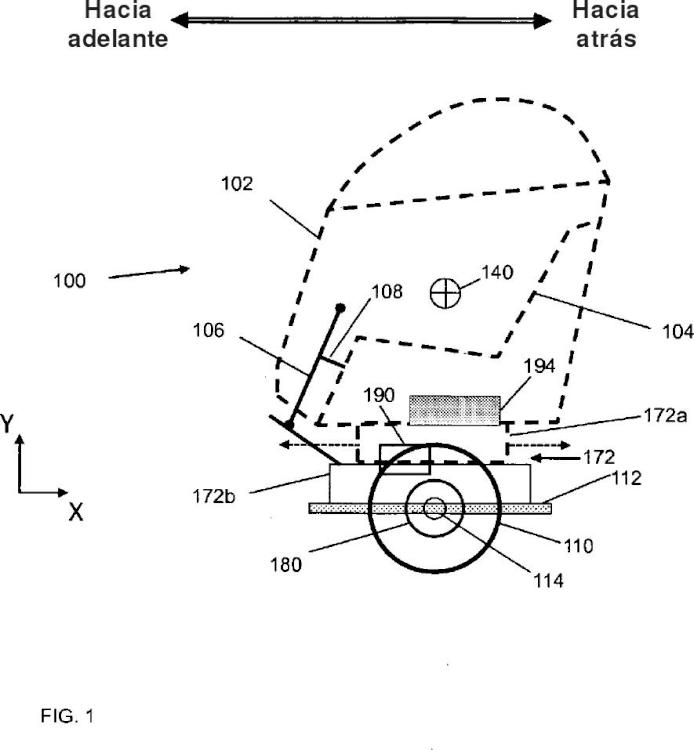
el vehículo (100, 200, 268, 500) que comprende un soporte (104, 204, 272) al menos una rueda (110, 210, 260, 264), una estructura (172) de acoplamiento que tiene una porción (172a) de soporte acoplada al soporte (104, 204, 272) y una porción (172b) de plataforma acoplada a al menos una rueda (110, 210, 260, 264) que le permite a la porción (172a) de soporte moverse o deslizarse hacia adelante y hacia atrás con respecto a la porción (172b) de plataforma, una transmisión acoplada a al menos una rueda (110, 210, 260, 264) para balancear dinámicamente el vehículo (100, 200, 268, 500) y suministrar potencia a al menos una rueda (110, 210, 260, 264) para propulsar el vehículo (100, 200, 268, 500), un accionador (190, 640) acoplado a una estructura (172) de acoplamiento para controlar la posición de la porción (172a) de soporte con relación a la porción (172b) de plataforma, un controlador (194, 292, 302, 400) acoplado a la transmisión para controlar la transmisión y acoplada al accionador (190, 640) para controlar el accionador (190, 640), el tren de aterrizaje (504) acoplado al vehículo (100, 200, 268, 500), en donde la combinación del tren de aterrizaje (504) y la al menos una rueda (110, 210, 260, 264) mantienen el vehículo (100, 200, 15 268, 500) en un estado estáticamente estable cuando el vehículo (100, 200, 268, 500) está operando en el estado estáticamente estable, el método caracterizado por: controlar la transmisión para comandar al menos la al menos una rueda (110, 210, 260, 264) para mantener una condición de velocidad cero y mantener el vehículo (100, 200, 268, 500) en una posición estacionaria con respecto a una superficie subyacente;
controlar el accionador (190, 640) para mover o deslizar la posición de la porción (172a) de soporte con relación a la porción (172b) de plataforma para alterar la posición del centro de gravedad del vehículo hacia un sitio donde el vehículo (100, 200, 268, 500) es capaz de balancearse con al menos una rueda (110, 210, 260, 264); e
iniciar el balanceo dinámico del vehículo (100, 200, 268, 500) con la al menos una rueda (110, 210, 260, 264) cuando la 25 ubicación del centro de gravedad del vehículo satisface una condición predeterminada.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2011/026458.
Solicitante: SEGWAY INC.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 14 TECHNOLOGY DRIVE BEDFORD, NH 03110 ESTADOS UNIDOS DE AMERICA.
Inventor/es: MULLER, ALEXANDER, HEINZMANN,JOHN,DAVID, STEVENS,JON M, DEBRUIN,RAYMOND, FOALE,ANTHONY, HOELL,JOSEPH, HUSSEY,PATRICK A.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A61G5/02 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61G MEDIOS DE TRANSPORTE, MEDIOS DE TRANSPORTE PERSONALES O DISPOSICIONES ESPECIALMENTE ADAPTADAS PARA ENFERMOS O PARA INVALIDOS (aparatos para ayudar a caminar a enfermos o a inválidos A61H 3/00 ); SILLAS O MESAS DE OPERACIONES; SILLONES DE DENTISTA; DISPOSITIVOS DE INHUMACION (embalsamado cadáveres A01N 1/00). › A61G 5/00 Sillas o medios de transporte personales especialmente adaptados para enfermos o para inválidos, p. e., sillas de ruedas (equipamientos que permiten a los enfermos o a los inválidos controlar un aparato o dispositivo que no forma parte del cuerpo A61F 4/00; bicicletas especialmente adaptadas para inválidos B62K 3/16). › propulsados por el enfermo o el inválido.
- B62K17/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62K CICLOS; CUADROS PARA CICLOS; DISPOSITIVOS DE DIRECCION; MANDOS ACCIONADOS POR EL CONDUCTOR ADAPTADOS ESPECIALMENTE A LOS CICLOS; SUSPENSION DE CUBOS DE RUEDAS DE CICLOS; SIDECARS, REMOLQUES DELANTEROS O VEHICULOS ADICIONALES SIMILARES PARA CICLOS. › Ciclos no previstos en otro lugar.
- B62K3/00 B62K […] › Bicicletas.
- G05D1/08 FISICA. › G05 CONTROL; REGULACION. › G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F). › G05D 1/00 Control de la posición, del rumbo, de la altitud o de la actitud de vehículos terrestres, acuáticos, aéreos o espaciales, p. ej. piloto automático (sistemas de radionavegación o sistemas análogos que utilizan otras ondas G01S). › Control de la actitud, es decir, eliminación o reducción de los efectos del balanceo, cabeceo o guiñada.
PDF original: ES-2547959_T3.pdf

Fragmento de la descripción:
Aparato y métodos para control de un vehículo Campo de la invención
La presente invención corresponde al control de vehículos eléctricos, y en particular, controlar el movimiento de un vehículo eléctrico.
Antecedentes de la invención
Son conocidos un amplio rango de vehículos y métodos para transportar seres humanos. Típicamente, tales vehículos se fundamentan en la estabilidad estática y son diseñados para estabilidad bajo todas las condiciones previstas de ubicación de sus miembros que hacen contacto con el suelo con una superficie subyacente. Por ejemplo, un vector de gravedad que actúa sobre el centro de gravedad de un automóvil pasa entre los puntos de contacto con el suelo de las ruedas del automóvil y la suspensión del automóvil mantiene todas las ruedas sobre el suelo en todo momento haciendo el automóvil estable. Aunque existen condiciones (por ejemplo Incremento o disminución de la velocidad, giros bruscos y pendientes empinadas) que originan que los vehículos de otra manera estable se conviertan en inestables.
Un vehículo dinámicamente estabilizado, también conocido como vehículo de balanceo, es un tipo de vehículo que tiene un sistema de control que mantiene activamente la estabilidad del vehículo mientras el vehículo está operando. En un vehículo que solamente tiene dos ruedas lateralmente dispuestas, por ejemplo, el sistema de control mantiene la estabilidad de proa a popa del vehículo al detectar continuamente la orientación del vehículo, determinando la acción correctiva necesaria para mantener la estabilidad, y comandar los motores de las ruedas para hacer la acción correctiva. Si el vehículo pierde la capacidad de mantener la estabilidad, tal como por una falla de un componente o la falta de potencia suficiente, el ser humano puede experimentar una pérdida súbita de balance. El Documento EP 2017172 describe tal vehículo y las estrategias de transición de acuerdo con los preámbulos de las respectivas reivindicaciones 1, 6, 12 y 14.
Para los vehículos que mantienen una huella estable, el acoplamiento entre el control de dirección y el control de movimiento hacia delante de los vehículos es de menor preocupación. Bajo condiciones de carretera típicas, se mantiene la estabilidad en virtud de que las ruedas están en contacto con el suelo a lo largo del curso de un giro. En un vehículo de balanceo con dos ruedas lateralmente dispuestas, sin embargo, cualquier torque aplicado a una o más ruedas afecta la estabilidad del vehículo.
Resumen de la invención
La invención, en un aspecto, caracteriza un método para la transición de un vehículo desde el estado estáticamente estable a un estado dinámicamente balanceado. El vehículo incluye un soporte, al menos una rueda, una estructura de acoplamiento que tiene una porción de soporte acoplada al soporte y una porción de suelo acoplada a al menos una rueda que le permite a la porción de soporte moverse o deslizarse de proa a popa con respecto a porción de plataforma, una transmisión acoplada a al menos una rueda para balancear dinámicamente el vehículo y suministrar potencia a la al menos una rueda para propulsar el vehículo, un accionador acoplado a la estructura de acoplamiento para controlar la posición de la porción de soporte con relación a la porción de plataforma. Un controlador acoplado a la transmisión para controlar la transmisión y acoplada al accionador para controlar el accionador, y el tren de aterrizaje acoplado al vehículo, en donde la combinación del tren de aterrizaje y al menos una rueda mantiene el vehículo en estado estáticamente estable cuando el vehículo está operando en el estado estáticamente estable. El método incluye controlar la transmisión para comandar la al menos una rueda para mantener una condición de velocidad cero y mantener el vehículo en posición estacionaria con respecto a la superficie subyacente. El método también incluye controlar el accionador para mover o deslizar la posición de la porción de soporte con relación a la porción de plataforma para alterar la posición del centro de gravedad del vehículo hacia un sitio donde el vehículo es capaz de balancearse con la al menos una rueda. El método también incluye iniciar el balanceo dinámico del vehículo con la al menos una rueda cuando la ubicación del centro de gravedad del vehículo satisface una condición predeterminada.
En algunas realizaciones, la condición predeterminada se satisface cuando una carga aplicada por la superficie subyacente al tren de aterrizaje es menor que una cantidad predefinida. En algunas realizaciones, la carga aplicada por la superficie subyacente al tren de aterrizaje que utiliza un sensor de presión de fluido acoplado al sistema de frenado hidráulico acoplado al tren de aterrizaje del vehículo. En algunas realizaciones, la condición predeterminada se satisface cuando el vehículo se inclina hacia atrás y el tren de aterrizaje ya no está en contacto con la superficie subyacente.
En algunas realizaciones, la condición predeterminada se satisface cuando la posición de la porción de soporte con relación a la porción de plataforma se aproxima a una posición de umbral predefinida. En algunas realizaciones, el método incluye controlar la posición de la porción de soporte con relación a la porción de plataforma y la inclinación del vehículo para nivelar el soporte. En algunas realizaciones, el método incluye controlar la transmisión para deshabilitar el comando que mantiene la al menos una rueda en una condición de velocidad cero y mantener el vehículo en una posición estacionaria con respecto a la superficie subyacente.
La invención, en otro aspecto, caracteriza un vehículo de balanceo dinámico que incluye un soporte, al menos una rueda, y una estructura de acoplamiento que tiene una porción de soporte acoplada al soporte y una porción de plataforma acoplada a al menos una rueda que le permite a la porción de soporte moverse o deslizarse de proa a popa con respecto a la porción de plataforma. El vehículo también Incluye una transmisión acoplada a al menos una rueda para balancear dinámicamente el vehículo y suministrar potencia a la al menos una rueda para propulsar el vehículo y un accionador acoplado a la estructura de acoplamiento para controlar la posición de la porción de soporte con relación a la porción de plataforma. El vehículo también Incluye un tren de aterrizaje acoplado al vehículo, en donde la combinación del tren de aterrizaje y al menos una rueda mantiene el vehículo en estado estáticamente estable cuando el vehículo está operando en estado estáticamente estable. El vehículo también incluye un controlador acoplado a la transmisión para controlar la transmisión y acoplado al accionador para controlar el accionador, el controlador configurado para hacer la transición del vehículo desde el estado estáticamente estable al estado dinámicamente balanceado. El controlador se configura para controlar la transmisión para comandar la al menos una rueda para mantener una condición de velocidad cero y mantener el vehículo en una posición estacionaria con respecto a la superficie subyacente, controlar el accionador para mover o deslizar la posición de la porción de soporte con relación a la porción de plataforma para alterar la posición del centro de gravedad del vehículo hacia una ubicación donde el vehículo es capaz de balancearse con al menos una rueda, e Iniciar el balanceo dinámico del vehículo con la al menos una rueda cuando la ubicación del centro de gravedad del vehículo satisface una condición predeterminada.
En algunas realizaciones, la condición predeterminada se satisface cuando una carga aplicada a la superficie subyacente del tren de aterrizaje es menor que una cantidad predefinida. En algunas realizaciones, el vehículo incluye un sensor de presión de fluido acoplado a un sistema de frenado hidráulico acoplado al tren de aterrizaje del vehículo, en donde el sensor de presión de fluido se utiliza para determinar la carga aplicada por la superficie subyacente al tren de aterrizaje. En algunas realizaciones, la condición predeterminada se satisface cuando el vehículo se inclina hacia atrás y el tren de aterrizaje ya no está en contacto con la superficie subyacente. En algunas realizaciones, la condición predeterminada se satisface cuando la posición de la porción de soporte con relación a la porción de plataforma se aproxima a una posición umbral predefinida.
En algunas realizaciones, el controlador controla la transmisión y el accionador para controlar la posición de la porción de soporte con relación a la porción de plataforma y la Inclinación del vehículo para nivelar el soporte. En algunas realizaciones, el controlador controla la transmisión para deshabilitar... [Seguir leyendo]
Reivindicaciones:
1. Un método para hacer la transición de un vehículo desde un estado estáticamente estable a un estado dinámicamente balanceado, el vehículo (100, 200, 268, 500) que comprende un soporte (104, 204, 272) al menos una rueda (110, 210, 260, 264), una estructura (172) de acoplamiento que tiene una porción (172a) de soporte acoplada al soporte (104, 204, 272) y una porción (172b) de plataforma acoplada a al menos una rueda (110, 210, 260, 264) que le permite a la porción (172a) de soporte moverse o deslizarse hacia adelante y hacia atrás con respecto a la porción (172b) de plataforma, una transmisión acoplada a al menos una rueda (110, 210, 260, 264) para balancear dinámicamente el vehículo (100, 200, 268, 500) y suministrar potencia a al menos una rueda (110, 210, 260, 264) para propulsar el vehículo (100, 200, 268, 500), un accionador (190, 640) acoplado a una estructura (172) de acoplamiento para controlar la posición de la porción (172a) de soporte con relación a la porción (172b) de plataforma, un controlador (194, 292, 302, 400) acoplado a la transmisión para controlar la transmisión y acoplada al accionador (190, 640) para controlar el accionador (190, 640), el tren de aterrizaje (504) acoplado al vehículo (100, 200, 268, 500), en donde la combinación del tren de aterrizaje (504) y la al menos una rueda (110, 210, 260, 264) mantienen el vehículo (100, 200, 268, 500) en un estado estáticamente estable cuando el vehículo (100, 200, 268, 500) está operando en el estado estáticamente estable, el método caracterizado por: controlar la transmisión para comandar al menos la al menos una rueda (110, 210, 260, 264) para mantener una condición de velocidad cero y mantener el vehículo (100, 200, 268, 500) en una posición estacionaria con respecto a una superficie subyacente;
controlar el accionador (190, 640) para mover o deslizar la posición de la porción (172a) de soporte con relación a la porción (172b) de plataforma para alterar la posición del centro de gravedad del vehículo hacia un sitio donde el vehículo (100, 200, 268, 500) es capaz de balancearse con al menos una rueda (110, 210, 260, 264); e
iniciar el balanceo dinámico del vehículo (100, 200, 268, 500) con la al menos una rueda (110, 210, 260, 264) cuando la ubicación del centro de gravedad del vehículo satisface una condición predeterminada.
2. El método de la reivindicación 1, en donde la condición predeterminada se satisface cuando una carga aplicada por la superficie subyacente al tren de aterrizaje (504) es menor que una cantidad predefinida, en donde opcionalmente el método comprende además determinar la carga aplicada por la superficie subyacente al tren de aterrizaje (504) utilizando un sensor de presión de fluido acoplado a un sistema de freno hidráulico acoplado al tren de aterrizaje (504) del vehículo (100, 200, 268, 500).
3. El método de la reivindicación 1, en donde la condición predeterminada se satisface cuando el vehículo (100, 200, 268, 500) se inclina hacia atrás y el tren de aterrizaje (504) ya no está en contacto con la superficie subyacente.
4. El método de la reivindicación 1, en donde la condición predeterminada se satisface cuando la posición de la porción (172a) de soporte con relación a la porción (172b) de plataforma se aproxima a una posición umbral predefinida.
5. El método de la reivindicación 1, que comprende controlar la posición de la porción (172a) de soporte con relación a la porción (172b) de plataforma y la inclinación del vehículo (100, 200, 268, 500) para nivelar el soporte (104, 204, 272) en donde opcionalmente:
el método comprende controlar la transmisión para deshabilitar el comando que mantiene la al menos una rueda (110, 210, 260, 264) a una condición de velocidad cero y mantener el vehículo (100, 200, 268, 500) en una posición estacionaria con respecto a la superficie subyacente.
6. Un vehículo dinámicamente balanceado (100, 200, 268, 500) el vehículo (100, 200, 268, 500) comprende: un soporte (104, 204, 272);
al menos una rueda (110, 210, 260, 264);
una estructura (172) de acoplamiento que tiene una porción (172a) de soporte acoplada al soporte (104, 204, 272) y una porción (172b) de plataforma acoplada a la al menos una rueda (104, 204, 260, 264) que le permiten a la porción (172a) de soporte moverse o deslizarse de hacia adelante y hacia atrás con respecto a la porción (172b) de plataforma;
una transmisión acoplada a la al menos una rueda (104, 204, 260, 264) para balancear dinámicamente el vehículo (100, 200, 268, 500) y suministrar potencia a la al menos una rueda (104, 204, 260, 264) para propulsar el vehículo (100, 200, 268, 500);
un accionador (190, 640) acoplado a la estructura (172) de acoplamiento para controlar la posición de la porción (172a) de soporte con relación a la porción (172b) de plataforma;
tren de aterrizaje (504) acoplado al vehículo (100, 200, 268, 500) en donde la combinación del tren de aterrizaje (504) y la al menos una rueda (104, 204, 260, 264) mantiene el vehículo (100, 200, 268, 500) en un estado estáticamente estable cuando el vehículo está siendo operado en un estado estáticamente estable; y
un controlador (194, 292, 302, 400) acoplado a la transmisión para controlar la transmisión y acoplado al accionador (190, 640) para controlar el accionador (190, 640)
Caracterizado porque
el controlador (194, 292, 302, 400) configurado para la transición del vehículo (100, 200, 268, 500) desde el estado estáticamente estable al estado dinámicamente balanceado, en donde el controlador (194, 292, 302, 400) se configura para:
controlar la transmisión para comandar la al menos una rueda (104, 204, 260, 264) para mantener la condición de velocidad cero y para mantener el vehículo (100, 200, 268, 500) en una posición estacionaria con respecto a una superficie subyacente,
controlar el accionador (190, 640) para mover o deslizar la posición de la porción (172a) de soporte con relación a la porción (172b) de plataforma para alterar la posición del centro de gravedad del vehículo hacia una ubicación donde el vehículo es capaz de balancearse con al menos una rueda (104, 204, 260, 264), e
iniciar el balanceo dinámico del vehículo con la al menos una rueda (104, 204, 260, 264) cuando la ubicación del centro de gravedad del vehículo satisface una condición predeterminada.
7. El vehículo de la reivindicación 6, en donde la condición predeterminada se satisface cuando una carga aplicada por la superficie subyacente al tren de aterrizaje (504) es menor que una cantidad predefinida, en donde opcionalmente:
el vehículo comprende un sensor de presión de fluido acoplado a un sistema de freno hidráulico acoplado al tren de aterrizaje (504) del vehículo (100, 200, 268, 500), en donde el sensor de presión del fluido se utiliza para determinar la carga aplicada por la superficie subyacente al tren de aterrizaje (504).
8. El vehículo de la reivindicación 6, en donde la condición predeterminada se satisface cuando el vehículo (100, 200, 268, 500) se inclina hacia atrás y el tren de aterrizaje (504) ya no está en contacto con la superficie subyacente.
9. El vehículo de la reivindicación 6, en donde la condición predeterminada se satisface cuando la posición de la porción (172a) de soporte con relación a la porción (172b) de plataforma se aproxima a una posición umbral predefinida.
10. El vehículo de la reivindicación 6, en donde el controlador (194, 292, 302, 400) controla la transmisión y el accionador (190, 640) para controlar la posición de la porción (172a) de soporte con relación a la porción (172b) de plataforma y la inclinación del vehículo para nivelar el soporte (104, 204, 272).
11. El vehículo de la reivindicación 6, en uno o más de los siguientes aplica:
(a) el controlador (194, 292, 302, 400) controla la transmisión para deshabilitar el comando que mantiene la al menos una rueda (104, 204, 260, 264) en una condición de velocidad cero y mantener el vehículo en una posición estacionaria con respecto a la superficie subyacente; y
(b) el tren de aterrizaje (504) comprende una o más ruedas.
12. Un método para hacer la transición de un vehículo desde un estado dinámicamente balanceado a un estado estáticamente estable, el vehículo (100, 200, 268, 500) comprende un soporte (104, 204, 272), la al menos una rueda (104, 204, 260, 264), una estructura (172) de acoplamiento que tiene una porción (172a) de soporte acoplada al soporte (104, 204, 272) y una porción (172a) de plataforma acoplada a al menos una rueda (104, 204, 260, 264) que le permite a la porción (172a) de soporte moverse o deslizarse hacia adelante y hacia atrás con respecto a la porción (172b) de plataforma, una transmisión acoplada a al menos una rueda (104, 204, 260, 264) para balancear dinámicamente el vehículo (100, 200, 268, 500) y suministrar potencia a la al menos una rueda (104, 204, 260, 264) para propulsar el vehículo (100, 200, 268, 500) un accionador (190, 640) acoplada a la estructura (172) de acoplamiento para controlar la posición de la porción (172a) de soporte con relación a la porción (172b) de plataforma, un controlador (194, 292, 302, 400) acoplado a la transmisión para controlar la transmisión y acoplada al accionador (190, 640) para controlar el accionador (190, 640), y el tren de aterrizaje (504) acoplado al vehículo, en donde la combinación del tren de aterrizaje (504) y la al menos una rueda (104, 204, 260, 264) mantiene el vehículo (100, 200, 268, 500) en un estado estáticamente estable cuando el vehículo está operando en el estado estáticamente estable, el método caracterizado por:
comandar el accionador (190, 640) para controlar la posición de la porción (172a) de soporte con relación a la porción (172b) de plataforma para mantener una condición de velocidad cero y mantener el vehículo en una posición estacionaria con respecto a una superficie subyacente,
controlar la transmisión para inclinar el vehículo hacia adelante mientras se mantiene el vehículo en el estado dinámicamente balanceado, y
terminar el balanceado dinámico del vehículo cuando se satisface la condición de configuración de aterrizaje.
13. El método de la reivindicación 12, en donde uno o más de los siguientes aplica:
(a) el método comprende controlar el vehículo (100, 200, 268, 500) para evitar que el vehículo (100, 200, 268, 500) se incline hacia atrás después de comandar el accionador (190, 640) para controlar la posición de la porción (172a) de soporte con relación a la porción (172b) de plataforma para mantener una condición de velocidad cero y mantener el vehículo (100, 200, 268, 500) en una posición estacionaria con respecto a una superficie subyacente;
(b) en donde la condición de configuración de aterrizaje se satisface cuando una carga aplicada por la superficie subyacente al tren de aterrizaje (504) es mayor que una cantidad predefinida, en donde opcionalmente
el método comprende determinar la carga aplicada por la superficie subyacente al tren de aterrizaje (504) utilizando un sensor de presión de fluido acoplado a un sistema de frenado hidráulico acoplado al tren de aterrizaje (504) del vehículo (100, 200, 268, 500);
(c) La condición de configuración de aterrizaje se satisface cuando el tren de aterrizaje (504) está en contacto con la superficie subyacente;
(d) la condición de configuración de aterrizaje se satisface cuando la posición de la porción (172a) de soporte con relación a la porción (172b) de plataforma se aproxima a una posición de umbral predefinida;
(e) el método comprende, luego de terminarse el balanceo del vehículo (100, 200, 268, 500), mover la porción (172a) de soporte con relación a la porción (172b) de plataforma en una dirección hacia el tren de aterrizaje (504); y
(f) antes de terminar el balanceo dinámico del vehículo (100, 200, 268, 500) el método comprende comandar el accionador (190, 640) para mover la porción de soporte (172a) con relación a la porción (172a) de plataforma en una dirección hacia el tren de aterrizaje (504).
14. Un vehículo dinámicamente balanceado (100, 200, 268, 500), el vehículo (100, 200, 268, 500) comprende un soporte (104, 204, 272);
al menos una rueda (104, 204, 260, 264);
una estructura (172) de acoplamiento que tiene una porción (172a) acoplada al soporte (104, 204, 272) y una porción (172b) de plataforma acoplada a la al menos una rueda (104, 204, 260, 264) que le permite a la porción (172a) de soporte moverse o deslizarse hacia adelante y hacia atrás con respecto a la porción (172a) de plataforma;
una transmisión acoplada a la al menos una rueda (104, 204, 260, 264) para balancear dinámicamente el vehículo (100, 200, 268, 500) para suministrar potencia a la al menos una rueda (104, 204, 260, 264) para propulsar el vehículo (100, 200, 268, 500).
un accionador (190, 640) acoplado a la estructura (172) de acoplamiento para controlar la posición de la porción (172a) de soporte con relación a la porción (172b) de plataforma;
el tren de aterrizaje (504) acoplado al vehículo (100, 200, 268, 500), en donde la combinación del tren de aterrizaje (504) y la al menos una rueda (104, 204, 260, 264) mantiene el vehículo en estado estáticamente estable cuando el vehículo está operando en estado estáticamente estable; y
un controlador (194, 292, 302, 400) acoplado a la transmisión para controlar la transmisión y acoplado al accionador (190, 640) para controlar el accionador (190, 640),
Caracterizado porque
El controlador (194, 292, 302, 400) configurado para la transición del vehículo (100, 200, 268, 500), desde el estado dinámicamente balanceado al estado estáticamente estable, en donde el controlador (194, 292, 302, 400) está configurado para
comandar el accionador (190, 640) para controlar la posición de la porción (172a) de soporte con relación a la porción 172b
de plataforma para mantener una condición de velocidad cero y mantener el vehículo (100, 200, 268, 500) en una posición estacionaria con respecto a una superficie subyacente,
controlar la transmisión para inclinar el vehículo (100, 200, 268, 500), hacia adelante mientras que se mantiene el vehículo (100, 200, 268, 500) en un estado dinámicamente balanceado, y
terminar el balanceo dinámico del vehículo cuando se satisface la condición de configuración de aterrizaje
15. El vehículo (100, 200, 268, 500) de la reivindicación 14, en donde uno o más de los siguientes aplica:
(a) la condición de configuración de aterrizaje se satisface cuando una carga aplicada por la superficie subyacente al tren de aterrizaje (504) es mayor que una cantidad predefinida
16. El vehículo de la reivindicación 15 que comprende un sensor de presión de fluido acoplado a un sistema de frenado hidráulico acoplado al tren de aterrizaje (504) del vehículo (100, 200, 268, 500), en donde se utiliza el sensor de presión de fluido para determinar la carga aplicada por la superficie subyacente al tren de aterrizaje (504);
17. El vehículo de la reivindicación 14, en donde la configuración de aterrizaje se satisface cuando el tren de aterrizaje (504) está en contacto con la superficie subyacente
18. El vehículo de la reivindicación 14, en donde la configuración de aterrizaje se satisface cuando la posición de la porción (172a) de soporte con relación a la porción (172a) de plataforma se aproxima a una posición de umbral predefinida.
19. El vehículo de la reivindicación 14, en donde el controlador (194, 292, 302, 400) se configura para mover la porción (172a) de soporte con relación a la porción (172b) de plataforma en una dirección hacia el tren de aterrizaje (504) luego de terminar el balanceo dinámico del vehículo; y
20. El vehículo de la reivindicación 14, en donde el controlador (194, 292, 302, 400) se configura para comandar al accionador (190, 640) para mover la porción (172a) de soporte con relación a la porción (172b) de plataforma en una dirección hacia el tren de aterrizaje (504) antes de terminar el balanceo dinámico del vehículo (100, 200, 268, 500).
**(Ver fórmula)**FIG. 1
Patentes similares o relacionadas:
Procedimiento para amortiguar el movimiento de balanceo de un vehículo acuático, del 11 de Marzo de 2020, de SCHOTTEL GMBH: Procedimiento para amortiguar el movimiento de balanceo de un vehículo acuático alrededor del eje longitudinal (L) del mismo, en el que el vehículo acuático presenta […]
Procedimiento para la compensación del bloqueo de una pala de timón en un timón en forma de X, del 4 de Marzo de 2020, de ThyssenKrupp Marine Systems GmbH: Procedimiento para la compensación del bloqueo de una pala de timón en un timón en forma de X de un submarino, en donde el procedimiento exhibe las siguientes etapas: […]
Guía de aproximación de director de vuelo, del 6 de Noviembre de 2019, de THE BOEING COMPANY: Un método implementado por ordenador para proporcionar guiado durante una maniobra de aproximación de un avión , comprendiendo el método: determinar una […]
Filtro de Kalman modificado para la generación de correcciones de error de actitud, del 5 de Junio de 2019, de THE BOEING COMPANY: Medio de almacenamiento legible por ordenador que comprende instrucciones ejecutables por ordenador que, cuando se ejecutan por un ordenador , provocan que el ordenador: […]
Sistema de formación de imágenes espaciales en tres dimensiones, del 3 de Junio de 2019, de THALES: Sistema de formación de imágenes espaciales en tres dimensiones que comprende: - al menos dos satélites (Sat1, Sat2) en órbita geocéntrica en un mismo […]
 Método y aparato para la detección y gestión de fallos latentes para sistemas de control de vuelo por cable, del 29 de Mayo de 2019, de THE BOEING COMPANY: Sistema de control de aeronave que comprende:
sistemas de control de vuelo de piloto y copiloto (P, A), incluyendo cada uno un primer […]
Método y aparato para la detección y gestión de fallos latentes para sistemas de control de vuelo por cable, del 29 de Mayo de 2019, de THE BOEING COMPANY: Sistema de control de aeronave que comprende:
sistemas de control de vuelo de piloto y copiloto (P, A), incluyendo cada uno un primer […]
Métodos y aparatos de notificación de una asimetría de vuelo que influye en una aeronave, del 15 de Mayo de 2019, de THE BOEING COMPANY: Un método, que comprende: monitorizar una característica de balanceo de una aeronave ; determinar una salida de un sistema de piloto automático […]
Piloto automático de vehículo volador, del 24 de Abril de 2019, de THE BOEING COMPANY: Un metodo implementado por ordenador para controlar un vehiculo volador, que comprende: recibir, por un piloto automatico (218A) del vehiculo […]