Método de control de aerogenerador.
Método de control de aerogenerador.
Se describe un método de control de aerogeneradores dotados con sistema de control de ángulo de paso de pala y que se determinan como posicionados de manera desalineada con respecto de la dirección del viento incidente.
El método aquí descrito hace uso de una serie de datos y medidas captados en el propio aerogenerador o su entorno para procesar dichos datos y generar mediante una serie de procesos y cálculos una serie de valores que son utilizados en comandos de actuación sobre el sistema de control de ángulo de paso de pala de los aerogeneradores para evitar anomalías y/o aumentar la eficiencia de los mismos en dicha situación.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201331903.
Solicitante: ACCIONA WINDPOWER, S.A..
Nacionalidad solicitante: España.
Inventor/es: GARCIA SAYES,JOSE MIGUEL, NUÑEZ POLO,MIGUEL, ARLABAN GABEIRAS,TERESA, GARCÍA BARACE,ALBERTO, ARÍSTEGUI LANTERO,José Luis, LABORDA RUBIO,José Luis, GONZALÉZ MURUA,Alejandro.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- F03D7/02 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F03 MAQUINAS O MOTORES DE LIQUIDOS; MOTORES DE VIENTO, DE RESORTES, O DE PESOS; PRODUCCION DE ENERGIA MECANICA O DE EMPUJE PROPULSIVO O POR REACCION, NO PREVISTA EN OTRO LUGAR. › F03D MOTORES DE VIENTO. › F03D 7/00 Control de los motores de viento (alimentación o distribución de energía eléctrica H02J, p. ej. disposiciones para ajustar, eliminar o compensar la potencia reactiva en las redes H02J 3/18; control de generadores eléctricos H02P, p. ej. disposiciones para el control de generadores eléctricos con el propósito de obtener las características deseadas en la salida H02P 9/00). › teniendo los motores de viento el eje de rotación dispuesto sustancialmente paralelo al flujo de aire que entra al rotor.
- F03D7/04 F03D 7/00 […] › Control automático; Regulación.
Fragmento de la descripción:
La presente invención se refiere al campo técnico de las energía renovables, más concretamente a la generación de energía eléctrica a partir de energía eólica.
El objeto de la invención va dirigido a un método de control de aerogeneradores que permite gestionar de manera eficiente su funcionamiento en situaciones de anomalías como puede 10 ser la desalineación.
ESTADO DE LA TÉCNICA
Hoy en día es habitual el empleo de energías renovables para la generación eléctrica,
siendo de entre ellas la energía eólica una de las más eficientes. La energía eólica permite generar electricidad a partir del viento mediante aerogeneradores. Dichos aerogeneradores constan básicamente de una torre, una góndola que alberga el generador eléctrico, un rotor formado a su vez por al menos dos palas, y un tren de potencia que transmite potencia del rotor hacia el generador eléctrico. El tren de potencia puede comprender una multiplicadora que conecta un eje de baja velocidad conectado al rotor y un eje de alta velocidad conectado al generador eléctrico.
En aerogeneradores multimegawatio, existe una tendencia de mercado hacia rotores mayores, que proporcionan energía a un coste menor. En dichas configuraciones existe una importancia creciente del sistema de control. Dicho sistema maximiza la producción de energía a la par que limita las cargas mecánicas producidas por el viento. Para ello, el sistema de control actúa sobre el ángulo de paso de pala -ángulo de pitch-y sobre el par demandado al generador.
Por una parte, el ángulo de pitch se controla mediante un conjunto de actuadores que hacen girar la pala en torno a su eje longitudinal. Dicha actuación consigue variar el par aerodinámico, bien para obtener la máxima potencia posible del viento en unas condiciones meteorológicas, bien para limitar las cargas mecánicas producidas sobre el aerogenerador.
Por otra parte, el sistema de control modula el par demandado al generador desde el convertidor. La modulación del par también se realiza con el doble objetivo de obtener la máxima potencia posible del viento en unas condiciones meteorológicas dadas, y para limitar las cargas mecánicas producidas sobre el aerogenerador.
Debido a la naturaleza tridimensional y estocástica del viento -a lo largo del área barrida por el rotor, el viento es un vector no uniforme en el espacio y aleatorio-, las cargas experimentadas por cada pala y como consecuencia de ello por la turbina eólica, son variables en el tiempo. Un ejemplo de esta variabilidad se observa en función de la altura respecto a la superficie terrestre, produciéndose el fenómeno conocido como cortadura (wind shear) . Otro ejemplo es la variabilidad de la dirección del viento, que obliga a considerar la actuación de un sistema que orienta la nacelle para mantener el rotor correctamente orientado. Se trata del sistema de yaw.
El sistema de yaw no actúa continuamente. Únicamente orienta el rotor hacia la dirección del viento cuando un sistema que comprende una veleta detecta que la desorientación supera cierto valor umbral durante tiempo determinado. En el transcurso del tiempo en que el rotor permanece desorientado, pueden darse situaciones en que la desorientación provoque que el comportamiento equivalente de alguna pala sea en pérdida, produciéndose aerodinámicas elevadas sobre el rotor, y perdiéndose la capacidad de control mediante la regulación del paso de pala. la presente invención está concebida para atajar este problema.
En el estado de la técnica actual, lo habitual es lo siguiente:
Cuando se detecta una desorientación el sistema de control actúa con el sistema de orientación de la góndola para corregirla. Sin embargo, el control de yaw, se realiza en base a señales medias de desorientación que tienen que superar un umbral durante un tiempo determinado (no breve) para evitar la sobreactuación con el sistema de yaw. Además, el sistema de yaw es un sistema de actuación lenta (del orden de unos pocos grados por segundo) , que hace que, si el cambio en la dirección del viento es grande y rápido, pase bastante tiempo hasta que se corrige. Por ejemplo, para un error de 90° a una velocidad habitual del sistema de orientación de yaw de 2°/s, se tardaría en orientar correctamente la máquina unos 45 s. Esto provoca que las cargas aumenten hasta que se corrige la orientación. Este es el estado de la técnica que se toma como el estado de la técnica más cercano para plantear la invención.
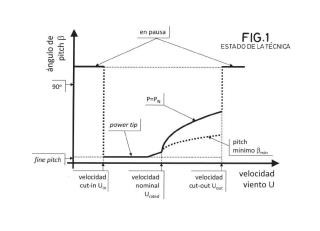
La curva que define el mínimo ángulo de paso de pala ¡3min -ver Figura 1-es predeterminada, Le. para cada velocidad de viento (o potencia) se fija un ángulo de paso de pala mínimo para evitar excursiones de velocidad. En la zona de regulación de velocidad en que la potencia generada es igual a la nominal PN, los transitorios en la velocidad de rotor provocados por las ráfagas de viento pueden llevar a sobrevelocidades (por ejemplo, tras un descenso de velocidad de viento que ha llevado asociado una disminución de ángulo de paso de pala, se puede producir un incremento tan rápido de viento que no dé tiempo a aumentar el ángulo de paso de pala en consecuencia) . En ese caso el sistema de control del aerogenerador provoca la desconexión de la máquina de la red eléctrica. Para prevenir dichas sobrevelocidades que producen la parada de la turbina, existe la posibilidad de limitar el mínimo ángulo de paso de pala alcanzado en fenómenos transitorios. Para ello, el sistema de control del estado de la técnica utiliza una cUlVa predeterminada por la que fija un umbral mínimo que se aplica a la consigna de paso de pala a un valor mínimo ángulo de paso de pala en función del ángulo de paso de pala medio el ángulo de paso de pala medio se emplea habitualmente como señal indicativa de la velocidad de viento media o potencia) . De esta forma, para determinado ángulo de paso de pala medio calculado en una ventana de tiempo, no se permiten excursiones de paso de pala por debajo de cierto valor de paso de pala Existen casos en los que el ángulo de paso de pala mínimo (en lugar de ser predeterminado para cada velocidad de viento media o potencia o paso de pala medio) se varía teniendo en cuenta la modificación de la eficiencia aerodinámica de la pala debida, por ejemplo, a la deposición de hielo o suciedad sobre ella. Ejemplos de estas técnicas de control se encuentran en los siguientes documentos:
Así el documento US8096761 describe un método de control que, ante la presencia de hielo, modifica el valor del mínimo ángulo de paso de pala ¡3min. Esta patente no especifica cómo se identifica la presencia de hielo, hablándose sólo de una estimación de la pérdida de eficiencia aerodinámica. Mientras que en US4656362 se presenta un método de control que modifica el valor del mínimo ángulo de paso de pala ¡3min utilizando un valor relacionado con el rendimiento aerodinámico.
En la actualidad las técnicas de control individual de paso de pala utilizan sensores para medir las cargas sobre las palas, a partir de las cuales se estiman las cargas sobre ejes fijos.
DESCRIPCiÓN DE LA INVENCiÓN
En un primer aspecto, la presente invención se refiere a un método de control de aerogeneradores que se encuentran en circunstancias como las anteriormente señaladas. Más concretamente el método de control aquí descrito se hace de especial utilidad cuando se determina que existe una desalineación del aerogenerador con respecto del viento incidente, lo cual puede provocar funcionamientos no óptimos en cuanto a captura a la vez que puede incidir en anomalías en el propio aerogenerador y sus componentes. Un segundo aspecto de la presente invención se refiere a un sistema de control de paso de pala de aerogeneradores adaptado para llevar a cabo el método referido al primero primer aspecto de la presente invención.
En consecuencia y en una realización preferida del método de control de aerogenerador con sistema de control de paso de pala se lleva a cabo una actuación sobre los distintos sistemas de control del mismo cuando se determina que existe una desalineación de la góndola con respecto de la dirección del viento incidente; para poder llevar a cabo los siguientes pasos de la realización preferida del método aquí descrito permite adaptar el valor de ángulo de paso de pala J3 a partir del valor de la desorientación del aerogenerador cp, valor de ángulo de paso de pala J3 que permite, mediante una consigna enviada a los accionadores de las palas, reducir las cargas asociadas por ejemplo, a una excesiva turbulencia de la dirección de viento (existen efectos racheados de dirección de viento que son perjudiciales) .
El método de control de la presente de la invención , realiza una serie de tomas...
Reivindicaciones:
1. Método de control de aerogenerador que comprende una serie de palas, y un sistema de control de ángulo de paso de pala, comprendiendo el método los siguientes pasos:
• calcular un valor indicativo de desorientación del aerogenerador a partir de al menos una señal indicativa de la dirección de viento,
• calcular una consigna inicial de ángulo de paso de pala ¡3 en función de al menos un valor relativo a un error de velocidad de giro del rotor;
• modificar al menos un consigna inicial de ángulo de paso de pala ¡3 si ésta es menor que un valor de límite inferior de ángulo de paso de pala ¡3MIN de manera que una consigna final de paso de pala sea mayor o igual que el valor del límite inferior del ángulo de paso de
pala PMIN; y
• actuar sobre al menos una de las palas del aerogenerador en función del valor de consigna de paso de pala final; estando el método caracterizado porque el valor de límite inferior de ángulo de paso de pala PMIN se calcula a partir de al menos el valor indicativo de la desorientación.
2. Método según la reivindicación 1, caracterizado porque el cálculo del valor de límite inferior de ángulo de paso de pala PMIN comprende llevar a cabo una comparación de una señal indicativa de la velocidad de viento con una curva o tabla que comprende una
correlación entre el ángulo de paso de pala mínimo ¡3MIN que marca un umbral de entrada en pérdida y cada valor de la señal indicativa de la velocidad de viento.
3. Método según la reivindicación 2, caracterizado porque la señal indicativa de la velocidad de viento comprende un ratio de velocidad de punta de pala A, definido como el cociente entre la velocidad lineal de la punta de la pala y la velocidad de viento:
A = ( velOcidad lineal punta pala) ve/ocidad viento '
4. Método según la reivindicación 3, caracterizado porque la señal indicativa de la velocidad de viento es una medida filtrada del ratio de velocidad de punta de pala) .. obtenida mediante la aplicación de un filtro F1 al ratio de velocidad de punta de pala A.
5. Método según reivindicación 4 caracterizado porque el filtro F1 comprende una
constante de tiempo T que es configurable.
6. Método según reivindicación 4 caracterizado porque el filtro F1 es una media móvil.
7. Método según reivindicación 6 caracterizado porque comprende calcular la media móvil con un número de puntos empleados configurable.
8. Método según la reivindicación 2, caracterizado porque el cálculo del valor del límite inferior de ángulo de paso de pala PMIN comprende el paso de sumar un término adicional .ó.PMIN al valor de límite inferior de ángulo de paso de pala PMIN obtenido a partir de la comparación de la señal indicativa de la velocidad de viento con la curva o tabla que comprende la correlación entre el ángulo de paso de pala mínimo PMIN que marca un umbral de entrada en pérdida para cada valor de la señal indicativa de la velocidad de viento, cuando se determina la existencia de desorientación a partir del valor indicativo de desorientación.
9. Método según la reivindicación 8 caracterizado porque el término adicional .ó.PMIN es predeterminado.
10. Método según la reivindicación 8 caracterizado porque el término adicional .ó.PMIN es dependiente del valor de la desorientación del aerogenerador.
11. Método según la reivindicación 4 caracterizado porque el paso de calcular el valor de límite inferior de ángulo de paso de pala PMIN comprende una modificación de una constante de tiempo de filtrado 1" para el filtro F1 aplicado al ratio de velocidad de punta de pala f...
12. Método según la reivindicación 11 caracterizado porque comprende comparar el valor indicativo de desorientación del aerogenerador con un valor umbral de desorientación predefinido y porque la modificación de la constante de tiempo de filtrado 1" para el filtro F1 está relacionada con el valor indicativo de desorientación del aerogenerador; de tal manera que una constante de tiempo de filtrado 1" para el filtro F1 es mayor cuando el valor indicativo de desorientación del aerogenerador es mayor que el valor umbral de desorientación y menor cuando el valor indicativo de desorientación del aerogenerador es menor que el valor umbral de desorientación.
13. Método según una cualquiera de las reivindicaciones 11 ó 12 caracterizado porque la
modificación de la constante de tiempo de filtrado t para el filtro F1 aplicado al ratio de velocidad de punta de pala A se lleva a cabo en una zona de producción parcial.
14. Método según una cualquiera de las la reivindicaciones 11 ó 12 donde el valor indicativo de desorientación del aerogenerador es mayor que el valor umbral de desorientación, caracterizado porque comprende modificar la constante de tiempo de filtrado t para el filtro F1 aplicado al ratio de velocidad de punta de pala A.
15. Método según una cualquiera de las reivindicaciones 8 a 12 donde la dirección de viento se mantiene, caracterizado porque comprende anular ÓPMIN transcurrido un intervalo de tiempo predefinido óT, el cual se inicia en un momento un cambio brusco en la orientación.
16. Método según una cualquiera de las reivindicaciones 10 a 15 caracterizado porque, 15 transcurrido un intervalo de tiempo predefinido ó T desde un cambio brusco en la desorientación, si la dirección de viento se mantiene, la constante de tiempo de filtrado t del
filtro F1 vuelve a tomar su valor original t.
~
z
u ' UJ --0 <l>
(!) -,
_UJ
lL. g
o ;'!
Vl UJ
•
O
~ E
u "
""[ 'E
.. . . .. . ....... ..... ", ....•.•... ........ 'o ..
Z
el.
el.
.............................. ..
g 4Jl!d
ap 0ln3u\?
-o
ro
-O U
o QJ
>
"O
ro "O
u o >
'"
:::J
O
....
e QJ
>
;;
=> o ~
::>
o
,
~
::>
u "O
ro "O
·ü
o '"
>
"O •
ft) -:j
"O "
u o ..
'" ::>
> u
ro
~
z :>:
=
~
c:::. "\ .
/
•
(L
-
(L
"O E '" /
"\
~
ni >-~
>--ª-"O
1;;
~
..
"O..
E
>
Patentes similares o relacionadas:
Aparato y procedimiento para hacer funcionar una turbina eólica en condiciones de voltaje de red de suministro bajo, del 22 de Julio de 2020, de VESTAS WIND SYSTEMS A/S: Generador de turbina eólica que incluye un rotor que tiene palas de paso variable conectadas de forma funcional a él, un generador AC para suministrar electricidad […]
Método y sistema de control para turbina eólica que tiene múltiples rotores, del 15 de Julio de 2020, de VESTAS WIND SYSTEMS A/S: Sistema de turbina eólica que comprende: una pluralidad de módulos de turbina eólica montados en una estructura de soporte , en el que cada uno de los módulos […]
Sensor de error de guiñada, turbina eólica y ajuste de ángulo de guiñada, del 15 de Julio de 2020, de Siemens Gamesa Renewable Energy A/S: Un sensor de detección de error de guiñada que está adaptado para montarse en una turbina eólica de un tipo de eje horizontal, en el que el sensor de detección […]
Disposición de turbina, del 15 de Julio de 2020, de Zephir Limited: Una disposición de turbina que comprende una turbina que incluye una pluralidad de palas de turbina giratorias alrededor de un eje de turbina, […]
Sistema y procedimiento para detener el funcionamiento de una turbina eólica, del 1 de Julio de 2020, de GENERAL ELECTRIC COMPANY: Un procedimiento para detener el funcionamiento de una turbina eólica, comprendiendo el procedimiento: recibir las señales asociadas con al menos una […]
Sistema de control para amortiguar las vibraciones estructurales de un sistema de aerogenerador que tiene múltiples rotores, del 1 de Julio de 2020, de VESTAS WIND SYSTEMS A/S: Un sistema de aerogenerador que comprende: una pluralidad de aerogeneradores montados en una estructura de soporte que incluye una torre, en donde cada […]
Procedimiento para hacer funcionar una instalación de energía eólica, así como instalación de energía eólica, del 1 de Julio de 2020, de Wobben Properties GmbH: Procedimiento para hacer funcionar una instalación de energía eólica con un generador para suministrar potencia eléctrica a una red eléctrica, donde la instalación […]
Procedimiento de funcionamiento de un conjunto de guiñada de turbina eólica, del 1 de Julio de 2020, de Siemens Gamesa Renewable Energy A/S: Un procedimiento para hacer funcionar un conjunto de guiñada de turbina eólica que comprende un anillo de guiñada y una serie de unidades de accionamiento de […]