CORRECCION DE MEDICION ADAPTATIVA DURANTE LA MEDICION REMOTA DE DISTANCIAS.
Un procedimiento para el control de navegación de una nave (100,
400) mediante medición remota de distancia, que comprende las etapas de:
medir una distancia entre la nave (100, 400) y una superficie (410) sobre la que se desplaza la nave (100, 400);
registrar un movimiento relativo de la nave (100, 400);
recuperar información topográfica perteneciente a la distancia vertical entre la superficie (410) y el nivel medio del mar (300) en determinadas posiciones geográficas, y
combinar la distancia y el movimiento relativo con la información topográfica para determinar una posición geográfica, en el que,
la medición remota de distancia emplea un parámetro de corrección de medición que para cada posición geográfica y altitud en relación con el nivel medio del mar (300), designa una estimación de una indicación del medidor remoto (510) de distancia para medir la distancia más corta entre la nave (100, 400) y la superficie (410) en una dirección que se desvía de la dirección de medición deseada, en el que,
la dirección de medición deseada está representada por una línea vertical imaginaria entre la nave (100, 400) y el nivel medio del mar (300), que se caracteriza porque el procedimiento comprende además:
calcular, para cada posición y altitud geográficas, una distancia corregida como la suma de la distancia medida y el parámetro de corrección de medición, y
calcular el parámetro de corrección de medición como la diferencia máxima entre una distancia correcta en la posición y altitud geográficas particulares y una distancia esperada medida erróneamente en esa posición y altitud
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/SE01/02132.
Solicitante: SAAB AB.
Nacionalidad solicitante: Suecia.
Dirección: 581 88 LINKIPING.
Inventor/es: SVENSSON,MARTIN, NEREG RD,FREDRIK, PERSSON,NIKLAS.
Fecha de Publicación: .
Fecha Concesión Europea: 28 de Julio de 2010.
Clasificación Internacional de Patentes:
- G01C21/00C
- G01C5/00A
- G01S13/94
- G01S7/40A
Clasificación PCT:
- G01C21/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01C MEDIDA DE DISTANCIAS, NIVELES O RUMBOS; TOPOGRAFIA; NAVEGACION; INSTRUMENTOS GIROSCOPICOS; FOTOGRAMETRIA O VIDEOGRAMETRIA (medida del nivel de líquidos G01F; radio navegación, determinación de la distancia o velocidad mediante la utilización de efectos de propagación, p. ej. efecto Doppler, tiempo de propagación, de ondas de radio, disposiciones análogas que utilicen otras ondas G01S). › Navegación; Instrumentos de navegación no previstos en los grupos G01C 1/00 - G01C 19/00 (medida de la distancia recorrida sobre el suelo por un vehículo G01C 22/00; control de la posición, curso, altitud o actitud de vehículos G05D 1/00; sistemas de control de tráfico para vehículos rodados incluyendo transmisiones de tráfico de instrucciones de navegación para vehículos controlados G08G 1/0968).
- G01S13/94
Clasificación antigua:
- G01C21/00 G01C […] › Navegación; Instrumentos de navegación no previstos en los grupos G01C 1/00 - G01C 19/00 (medida de la distancia recorrida sobre el suelo por un vehículo G01C 22/00; control de la posición, curso, altitud o actitud de vehículos G05D 1/00; sistemas de control de tráfico para vehículos rodados incluyendo transmisiones de tráfico de instrucciones de navegación para vehículos controlados G08G 1/0968).
- G01S13/94
Fragmento de la descripción:
Corrección de medición adaptativa durante la medición remota de distancias.
Antecedentes de la invención y técnica anterior
La presente invención se refiere en general al control de navegación de naves por medio de medición remota de distancia, en la que la inclinación del medidor remoto de distancia para medir erróneamente la distancia más corta a la superficie sobre la que se mueve la nave se ajusta adaptativamente. Específicamente, la invención se refiere a un procedimiento y un aparato para el control de navegación de una nave de acuerdo con los preámbulos de la reivindicación 1 y de la reivindicación 8, respectivamente. La invención se refiere también a un programa de ordenador para llevar a cabo el procedimiento de acuerdo con la reivindicación 1, y a un medio legible con ordenador que tiene dicho programa grabado en el mismo.
Se conoce en general el hecho de utilizar tecnología de radar para determinar la distancia y el rumbo de los objetos (radar = detección y medición de radio). Realizando una detección doppler, es también posible determinar las relaciones de velocidad radial entre el radar y los objetos registrados.
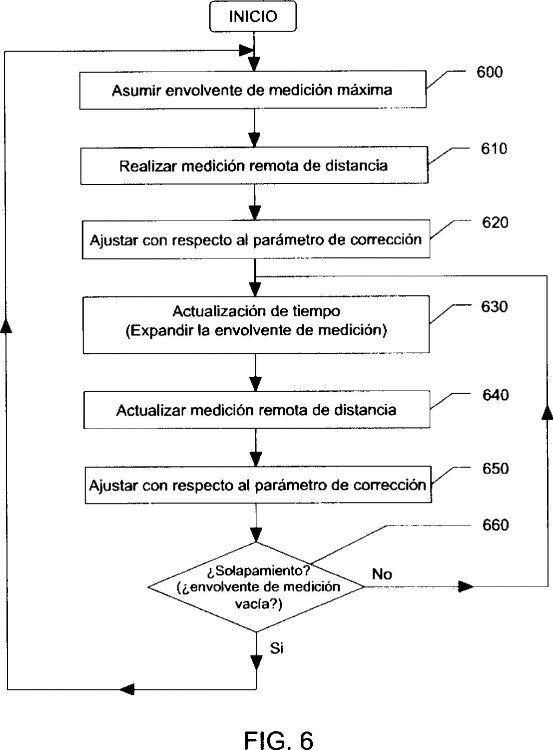
El artículo "Saab NINS - Un Sistema de Navegación Automatizado", de P. Bergljung et al., del 1 de Noviembre de 1999, núm. A, Saab Dynamics AB, describe cómo puede ser controlada la navegación de una aeronave en base al aspecto de la superficie sobre la que se mueve la aeronave. Un altímetro de radar dispuesto en la aeronave, envía señales hacia la superficie y determina la altitud sobre la superficie analizando las señales que se reflejan contra la superficie. La información de una base de datos perteneciente a la elevación de la superficie en la zona dentro de la que está situada la aeronave, se compara con la última elevación medida de la superficie. Las conclusiones pueden ser de ese modo extraídas como la posición de la aeronave. Lo que se conoce como envolvente de medición, representa un volumen de incertidumbre de un tamaño predeterminado dentro del cual se estima que la aeronave está situada. Mediante mediciones repetidas y suposiciones sobre la envolvente de medición, se reduce el tamaño de la envolvente de medición y se puede determinar la posición de la nave con una precisión más alta.
El Artículo "SAAB" "NINS/NILS - un sistema de aterrizaje autónomo para Gripen" de Pucar et al., en IEEE 2000, Simposio de Posición, Localización y Navegación, 13-16 de Marzo de 2000, pp. 254-261, es un ejemplo de un sistema de navegación que comprende una base de datos topográficos y un altímetro de radar. El altímetro de radar no mide realmente la altitud de la aeronave por encima del suelo, sino por el contrario la distancia al objeto más cercano dentro de una amplitud del haz, transmitiendo una señal modulada hacia el suelo. El tiempo transcurrido entre la transmisión de la señal modulada y su recepción tras la reflexión en el suelo, se convierte en altitud. El perfil medido del suelo por debajo de la aeronave, se compara con la base de datos de elevación almacenada en la aeronave, y con ello se puede hallar la posición de la aeronave.
Lo que se conoce como filtro de navegación de referencia del terreno, que utiliza un altímetro de radar y que ha sido propuesto por la solicitante, asume ciertas características del ruido que va asociado a la medición de radar. Se supone por tanto que el ruido es debido al hecho de que la medición no se realiza ocasionalmente con respecto a la superficie real del suelo, sino contra objetos que están situados sobre la superficie, como los árboles, postes y mástiles. Con el fin de hacer que el filtro de navegación de referencia del terreno sea independiente de tal ruido, la envolvente de medición se elige con un espesor tal que se pueda decir con certeza que la aeronave se encuentra localizada en el interior de la envolvente de medición con independencia del ruido.
Cuando se realizan mediciones de altitud de radar, se genera una incertidumbre debido al hecho de que la señal recibida por el radar podría no haber sido reflejada por la superficie en una dirección de referencia deseada. De forma más habitual, esta dirección se establece verticalmente con respecto al nivel medio del mar. Se introduce una incertidumbre en la medición en tanto que las reflexiones en otras direcciones distintas a la dirección de referencia podrían ser interpretadas como reflexiones en esa dirección.
Si, por ejemplo, cuando se realiza una medición de altitud de radar desde una aeronave, un eco de radar correspondiente a una reflexión desde una loma de la superficie, que está situada más cerca de la aeronave que la superficie verticalmente por debajo, aunque en una dirección oblicua por debajo de la aeronave, es interpretada como reflexión vertical de radar, la información de posición será errónea.
Por razones de precisión, resulta por supuesto deseable minimizar el área de incertidumbre cuando se determina la posición de una nave. Puesto que el procedimiento de control de navegación presupone que todas las mediciones remotas de distancia (por ejemplo, realizadas por medio de un radar), se ejecutan verticalmente por debajo de la nave, resulta por ello deseable reducir la influencia de mediciones remotas de distancia en otras direcciones tanto como sea posible, puesto que esto introduce incertidumbre en el procedimiento de control de navegación.
Las soluciones ya conocidas para la navegación ayudada por medición de altitud de radar, fallan en cuanto a tener en cuenta la inclinación del radar para medir una distancia, la cual es angularmente errónea con respecto a la superficie sobre la que se desplaza la nave.
Sumario de la invención
El objeto de la presente invención consiste por lo tanto en mitigar los problemas anteriores, y mejorar la precisión y también la robustez de las soluciones anteriores conocidas para el control de navegación sobre el terreno en base a la medición remota de distancia.
De acuerdo con un aspecto de la invención, el objeto se ha alcanzado mediante un procedimiento para la medición del parámetro de corrección de modelación de ruido en un medidor remoto de distancia según se ha descrito inicialmente, en el que la medición remota de distancia emplea un parámetro de corrección de medición que, para cada posición y altitud geográficas, designa una estimación de la inclinación del medidor remoto de distancia para medir la distancia más corta entre la nave y la superficie en una dirección que se desvía de la dirección de medición deseada.
De acuerdo con otro aspecto de la invención, el objeto se ha alcanzado mediante un programa de ordenador, el cual es directamente cargable en la memoria interna de un ordenador, que comprende el software para llevar a cabo las etapas de cualquiera de los procedimientos descritos en el párrafo anterior, cuando dicho programa se ejecuta en el ordenador.
De acuerdo con otro aspecto mas de la invención, el objeto se ha alcanzado con un medio legible con ordenador, que tiene un programa grabado en el mismo, en el que el programa consiste en hacer que el ordenador lleve a cabo el procedimiento propuesto en el penúltimo párrafo anterior.
De acuerdo con otro aspecto mas de la invención, el objeto se ha alcanzado mediante el aparato inicialmente descrito, en el que, para cada posición y altitud geográficas, un parámetro de corrección de medición designa una estimación de una inclinación del medidor remoto de distancia, para medir la distancia más corta entre la nave y la superficie en una dirección que se desvía de la dirección de medición deseada. Una unidad de control del aparato tiene en cuenta el parámetro de corrección de medición cuando calcula la posición geográfica de la nave.
La solución propuesta mejora tanto la precisión como la fiabilidad durante la determinación de posición por medio de medición remota de distancia. Esto, a su vez, da como resultado que la seguridad de tráfico pueda ser mejorada en el tráfico de naves de cualquier tipo cuando se utiliza tal posicionamiento, tal como el control de navegación de aeronaves y el control de navegación marina, así como también bajo la superficie del agua.
Breve descripción de los dibujos
La presente invención va a ser explicada ahora de forma más detallada por medio de realizaciones preferidas, las cuales se describen como ejemplos, y con referencia a los dibujos anexos.
La Figura 1 ilustra cómo una aeronave equipada con un aparato conforme a la invención pasa sobre un segmento de terreno con lo que se efectúa...
Reivindicaciones:
1. Un procedimiento para el control de navegación de una nave (100, 400) mediante medición remota de distancia, que comprende las etapas de:
medir una distancia entre la nave (100, 400) y una superficie (410) sobre la que se desplaza la nave (100, 400);
registrar un movimiento relativo de la nave (100, 400);
recuperar información topográfica perteneciente a la distancia vertical entre la superficie (410) y el nivel medio del mar (300) en determinadas posiciones geográficas, y
combinar la distancia y el movimiento relativo con la información topográfica para determinar una posición geográfica, en el que,
la medición remota de distancia emplea un parámetro de corrección de medición que para cada posición geográfica y altitud en relación con el nivel medio del mar (300), designa una estimación de una indicación del medidor remoto (510) de distancia para medir la distancia más corta entre la nave (100, 400) y la superficie (410) en una dirección que se desvía de la dirección de medición deseada, en el que,
la dirección de medición deseada está representada por una línea vertical imaginaria entre la nave (100, 400) y el nivel medio del mar (300), que se caracteriza porque el procedimiento comprende además:
calcular, para cada posición y altitud geográficas, una distancia corregida como la suma de la distancia medida y el parámetro de corrección de medición, y
calcular el parámetro de corrección de medición como la diferencia máxima entre una distancia correcta en la posición y altitud geográficas particulares y una distancia esperada medida erróneamente en esa posición y altitud.
2. Un procedimiento de acuerdo con la reivindicación 1, que comprende calcular la distancia esperada medida erróneamente como:

en la que
X0, Y0 indica la posición geográfica particular,
hmsi indica la altitud particular,
X1, Y1 indica la posición geográfica sobre la superficie (410) respecto a la que se espera que el medidor remoto (510) de distancia mida una distancia errónea, y
htop (X1, Y1) indica la distancia vertical de la superficie (410) hasta el nivel medio del mar (300) en la posición geográfica contra la que se espera que el medidor remoto (510) de distancia mida la distancia errónea.
3. Un programa de ordenador cargable directamente en la memoria interna de un ordenador, que comprende un software para llevar a cabo las etapas de cualquiera de las reivindicaciones 1-2 cuando dicho programa se ejecuta en el ordenador.
4. Un medio legible con ordenador, que tiene un programa grabado en el mismo, en el que el programa está destinado a hacer que un ordenador lleve a cabo las etapas de cualquiera de las reivindicaciones 1-2.
5. Un aparato para el control de navegación de una nave (100, 400) mediante medición remota de distancia, que comprende:
un medidor remoto (510) de distancia, que mide una distancia entre la nave (100, 400) y una superficie (410),
un medidor de movimiento (520), que mide un movimiento relativo de la nave (100, 400),
una base de datos (530), que incluye información perteneciente a la distancia vertical entre la superficie (410) y el nivel medio del mar (300) en determinadas posiciones geográficas, y
una unidad (540) de control, que calcula la posición geográfica de la nave (100, 400) en base a al menos una combinación de la distancia y del movimiento relativo, en el que,
para cada posición y altitud geográficas en relación con el nivel medio del mar (300), un parámetro de corrección de medición designa una estimación de la inclinación del medidor remoto (510) de distancia, para medir la distancia más corta entre la nave (100, 400) y la superficie (410) en una dirección que se desvía de la dirección de medición deseada, estando la dirección de medición deseada representada por una línea vertical imaginaria entre la nave y el nivel medio del mar (300), y
la unidad (540) de control tiene en cuenta el parámetro de corrección de medición cuando calcula la posición geográfica de la nave (100, 400), que se caracteriza porque,
se calcula una distancia corregida, para cada posición y altitud geográficas, como la suma de la distancia medida y el parámetro de corrección de medición, y
el parámetro de corrección de medición se calcula como la diferencia máxima entre una distancia correcta en la posición y altitud geográficas particulares y una distancia esperada medida erróneamente en esa posición y altitud.
6. Un aparato de acuerdo con la reivindicación 5, en el que la base de datos (530) almacena parámetros de corrección de medición precalculados para posiciones geográficas y altitudes de referencia específicas.
7. Un aparato de acuerdo con la reivindicación 5, en el que la unidad (540) de control calcula un parámetro relevante de corrección de medición en relación con el cálculo de la posición de la nave (100, 400).
Patentes similares o relacionadas:
Dispositivo de radar aerotransportado multifunción de banda ancha con una amplia cobertura angular que permite la detección y el seguimiento, del 11 de Febrero de 2015, de THALES: Dispositivo de radar aerotransportado que permite la detección de blancos para la implementación de una función de detección y de evitación de obstáculos, que comprende […]
Sistema para evitar la colisión entre una aeronave y un obstáculo, del 22 de Octubre de 2014, de VESTAS WIND SYSTEMS A/S: Un aparato para detectar y advertir a una aeronave acerca de un obstáculo aéreo, que comprende: una unidad de campo situada, en uso, en la proximidad […]
Unidad de campo de radar para sistema que evita la colisión entre una aeronave y un obstáculo, del 4 de Junio de 2014, de VESTAS WIND SYSTEMS A/S: Una unidad de campo para detectar y avisar a una aeronave acerca de un obstáculo, comprendiendo la unidad de campo una unidad central de procesamiento […]
INTERFAZ HOMBRE-MÁQUINA PARA APOYO A PILOTOS DURANTE EL DESPEGUE O ATERRIZAJE DE UN APARATO DE VUELO CON VISIÓN EXTERIOR REDUCIDA, del 5 de Diciembre de 2011, de EADS DEUTSCHLAND GMBH: Interfaz hombre-máquina, que para el apoyo a pilotos durante el despegue o aterrizaje de un aparato de vuelo en condiciones de visión exterior reducida representa […]
 NAVEGACION DE TERRENO PASIVA, del 20 de Enero de 2010, de SAAB AB: Una disposición de navegación de terreno pasiva que comprende: un sistema receptor de radio adaptado para recibir una señal de satélite reflejada por la tierra […]
NAVEGACION DE TERRENO PASIVA, del 20 de Enero de 2010, de SAAB AB: Una disposición de navegación de terreno pasiva que comprende: un sistema receptor de radio adaptado para recibir una señal de satélite reflejada por la tierra […]
 SISTEMA Y PROCEDIMIENTO DE NAVEGACION DE UN VEHICULO, del 16 de Noviembre de 2009, de SAAB AB: Un sistema de navegación de un vehículo conforme al contorno de una región de la superficie sobre la que se mueve, que comprende a bordo del vehículo un altímetro radar […]
SISTEMA Y PROCEDIMIENTO DE NAVEGACION DE UN VEHICULO, del 16 de Noviembre de 2009, de SAAB AB: Un sistema de navegación de un vehículo conforme al contorno de una región de la superficie sobre la que se mueve, que comprende a bordo del vehículo un altímetro radar […]
PROCESO Y DISPOSITIVO DE ANTICOLISIONES CON EL TERRENO PARA AERONAVES, del 16 de Mayo de 1997, de DASSAULT ELECTRONIQUE: UNA MEMORIA DE MASAS ALMACENA UNA BASE DE DATOS (BDT) QUE REPRESENTA AL MENOS UNA PARTE SUSTANCIAL DEL GLOBO TERRESTRE, SEGUN UNA MALLA DE VARIOS NIVELES, […]
 PROCESO DE PRESENTACION DE INFORMACIONES CARTOGRAFICAS Y DE ZONAS AERONAUTICAS SOBRE LA PANTALLA DE UNA AERONAVE, del 1 de Septiembre de 2008, de THALES: Proceso de síntesis, sobre una pantalla de aeronave, de al menos una primera ventana que representa una imagen cartográfica en vista […]
PROCESO DE PRESENTACION DE INFORMACIONES CARTOGRAFICAS Y DE ZONAS AERONAUTICAS SOBRE LA PANTALLA DE UNA AERONAVE, del 1 de Septiembre de 2008, de THALES: Proceso de síntesis, sobre una pantalla de aeronave, de al menos una primera ventana que representa una imagen cartográfica en vista […]