Controlador para un vehículo eléctrico de corriente alterna (CA).
Un controlador (20) para un vehículo eléctrico de CA que se aplica a un vehículo eléctrico de CA que tiene un convertidor (3) de modulación de ancho de pulso (PWM) que convierte una tensión de CA introducida desde una línea aérea (18) a través de un transformador (2) en una tensión de CC,
y que comprende una unidad de control del convertidor que controla una operación del convertidor (3) de PWM, en el que
la unidad de control del convertidor se divide en múltiples unidades de procesamiento aritmético configuradas mediante una matriz de puertas programables in situ (FPGA), y las unidades de procesamiento aritmético se adaptan para cambiar a corresponder a un cambio en la especificación del vehículo eléctrico de CA y, además se configuran mediante la FPGA para incluir:
una primera unidad de procesamiento aritmético (32A) que calcula una cantidad de corrección de tensión de CC basada en una referencia de tensión de CC predeterminado y en una tensión de CC del convertidor PWM para sacar la cantidad de corrección de tensión de CC;
una tercera unidad de procesamiento aritmético (32C) que realiza el procesamiento simultáneamente en paralelo con la primera unidad de procesamiento aritmético, y calcula una onda sinusoidal fundamental basada en una tensión de línea aérea a través de un filtro para sacar la onda sinusoidal fundamental; una cuarta unidad de procesamiento aritmético (33A) que calcula una primera cantidad de corrección asociada con la generación de una tensión de referencia del convertidor, en base a la cantidad de corrección de tensión de CC, la onda sinusoidal fundamental y una corriente de entrada del convertidor PWM para sacar la primera cantidad de corrección;
una quinta unidad de procesamiento aritmético (33B) que realiza el procesamiento simultáneamente en paralelo con la cuarta unidad de procesamiento aritmético, y calcula una segunda cantidad de corrección asociada con la generación de la referencia de tensión del convertidor, en base a una salida del filtro de la tensión de línea aérea y a la corriente de entrada del convertidor PWM para sacar la segunda cantidad de corrección; y
una sexta unidad de procesamiento (34A) que calcula la referencia de tensión del convertidor en base a la primera y segunda cantidades de corrección para sacar la referencia de tensión del convertidor.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/JP2008/063793.
Solicitante: MITSUBISHI ELECTRIC CORPORATION.
Nacionalidad solicitante: Japón.
Dirección: 7-3, MARUNOUCHI 2-CHOME CHIYODA-KU TOKYO 100-8310 JAPON.
Inventor/es: MATSUMOTO,Takeo.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B60L9/08 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60L PROPULSION DE VEHICULOS PROPULSADOS ELECTRICAMENTE (disposición o montaje de conjuntos de propulsión eléctrica o de varios motores principales diferentes para una propulsión recíproca o común sobre los vehículos B60K 1/00, B60K 6/20; disposición o montaje de la transmisión eléctrica en los vehículos B60K 17/12, B60K 17/14; prevención del patinado de las ruedas reduciendo la fuerza motriz en vehículos sobre raíles B61C 15/08; máquinas dinamoeléctricas H02K; control o regulación de motores H02P ); SUMINISTRO DE LA ENERGIA ELECTRICA AL EQUIPO AUXILIAR DE VEHICULOS PROPULSADOS ELECTRICAMENTE (circuitos eléctricos para el acoplamiento de vehículos B60D 1/64; calefacción eléctrica para vehículos B60H 1/00 ); SISTEMAS DE FRENOS ELECTRODINAMICOS PARA VEHICULOS, EN GENERAL (control o regulación de motores H02P ); SUSPENSION O LEVITACION MAGNETICAS PARA VEHICULOS; CONTROL DE LOS PARAMETROS DE FUNCIONAMIENTO SOBRE LOS VEHICULOS PROPULSADOS ELECTRICAMENTE; DISPOSITIVOS ELECTRICOS DE SEGURIDAD SOBRE VEHICULOS PROPULSADOS ELECTRICAMENTE. › B60L 9/00 Propulsión eléctrica a partir de energía externa al vehículo (propulsión eléctrica para vehículos mono rail, vehículos suspendidos o ferrocarriles de cremallera B60L 13/00; en combinación con baterías o pilas de combustible en el vehículo B60L 50/53). › alimentados por líneas de corriente alterna.
- H02M7/12 ELECTRICIDAD. › H02 PRODUCCION, CONVERSION O DISTRIBUCION DE LA ENERGIA ELECTRICA. › H02M APARATOS PARA LA TRANSFORMACION DE CORRIENTE ALTERNA EN CORRIENTE ALTERNA, DE CORRIENTE ALTERNA EN CORRIENTE CONTINUA O DE CORRIENTE CONTINUA EN CORRIENTE CONTINUA Y UTILIZADOS CON LAS REDES DE DISTRIBUCION DE ENERGIA O SISTEMAS DE ALIMENTACION SIMILARES; TRANSFORMACION DE UNA POTENCIA DE ENTRADA EN CORRIENTE CONTINUA O ALTERNA EN UNA POTENCIA DE SALIDA DE CHOQUE; SU CONTROL O REGULACION (transformadores H01F; convertidores dinamoeléctricos H02K 47/00; control de los transformadores, reactancias o bobinas de choque, control o regulación de motores, generadores eléctricos o convertidores dinamoeléctricos H02P). › H02M 7/00 Transformación de una potencia de entrada en corriente alterna en una potencia de salida en corriente continua; Transformación de una potencia de entrada en corriente continua en una potencia de salida en corriente alterna. › utilizando tubos de descarga con electrodo de control o dispositivos semiconductores con electrodo de control.
PDF original: ES-2528122_T3.pdf
Fragmento de la descripción:
Controlador para un vehículo eléctrico de corriente alterna (CA)
CAMPO TÉCNICO La presente invención se refiere a un controlador para un vehículo eléctrico de CA, y, más particularmente, a un controlador para un vehículo eléctrico de CA que se adapta para procesar la aritmética de control de una unidad de conversión en una FPGA
(Field Programmable Gate Array (Matriz de Puertas Programable In Situ) )
TÉCNICA ANTERIOR El Documento de Patente 1 describe a continuación en la Figura 2, por ejemplo, una configuración típica de una unidad de control del convertidor en un controlador convencional para un vehículo eléctrico de CA. En unidades de control del convertidor convencionales, que incluyen la unidad de control del convertidor descrita en el Documento de Patente 1, se realiza sobre todo procesamiento aritmético mediante software que utiliza un DSP (Digital Signal Processor (Procesador de Señal Digital) ) , porque el control aritmético mediante el control del convertidor es a menudo una colección de operaciones aritméticas que implican principalmente la suma, resta, multiplicación y división de valores analógicos y se puede configurar fácilmente mediante operaciones aritméticas de números de coma flotante.
El Documento de Patente 1: Solicitud de Patente Japonesa Abierta Nº . S62-77867
El documento titulado "FPGA-based Control of STATCOM using a Compact SVPWM Algorithm" de Zeliang Shu et 25 al. describe un controlador de la técnica relacionada.
EXPOSICIÓN DE LA INVENCIÓN
PROBLEMAS QUE SE VAN A RESOLVER MEDIANTE LA INVENCIÓN 30 Como se ha descrito anteriormente, el procesamiento aritmético mediante software que utiliza el DSP se configura principalmente en la unidad de control del convertidor del controlador convencional para un vehículo eléctrico de CA.
Sin embargo, en el caso de procesamiento aritmético por software que utiliza el DSP, la velocidad de procesamiento normalmente no se puede aumentar en comparación con la aritmética por hardware, lo que hace que sea aún más 35 difícil mejorar la precisión del control.
Cuando principalmente se lleva a cabo la aritmética por software que utiliza el DSP, los retardos no deseados o diferencias de adecuación temporal se producen durante el intercambio de datos entre un módulo de control (hardware) con una velocidad de procesamiento relativamente más alta y un módulo de control (software) con una velocidad de procesamiento más baja. En consecuencia, los componentes asíncronos de una frecuencia de alimentación, que idealmente no se producen, se superponen a armónicos de una corriente de retorno producida mediante una operación de conversión y pueden interferir con las operaciones de otros dispositivos de señalización.
La configuración se puede cambiar a un procesamiento aritmético que se realiza principalmente mediante la FPGA
en lugar del procesamiento aritmético mediante software que utiliza el DSP. Sin embargo, la unidad de control del convertidor realiza las operaciones aritméticas que implican principalmente la suma, resta, multiplicación y división de valores analógicos, y por consiguiente la FPGA que realiza operaciones aritméticas de los números en coma fija requiere un mayor número de bits para lograr las operaciones aritméticas con precisión. Como consecuencia, se hacen difíciles las operaciones aritméticas a altas velocidades de procesamiento, que son características inherentes 50 de la FPGA.
La presente invención se ha alcanzado en vista de los problemas anteriores, y un objeto de la presente invención es proporcionar un controlador para un vehículo eléctrico de CA que puede suprimir la reducción en una velocidad de procesamiento para asegurar la precisión de control deseada y que puede disminuir los impactos sobre los 55 armónicos de retorno cuando la aritmética de control en una unidad de control del convertidor se procesa mediante una FPGA.
MEDIOS PARA RESOLVER EL PROBLEMA Para resolver los problemas anteriormente mencionados y para lograr el objeto, se aplica un controlador para un 60 vehículo eléctrico de CA según la reivindicación 1 a un vehículo eléctrico de CA.
EFECTO DE LA INVENCIÓN Según el controlador para un vehículo eléctrico de CA de la presente invención, el procesamiento aritmético que se va a realizar en la unidad de control del convertidor se divide en los múltiples bloques de procesamiento aritmético.
Los bloques de procesamiento aritmético divididos se configuran mediante la FPGA, y algunos de los bloques de procesamiento aritmético divididos se configuran para permitir el procesamiento paralelo simultáneo. Por lo tanto, se
puede suprimir la reducción en la velocidad de procesamiento para asegurar la precisión de control deseada, y se pueden disminuir los efectos sobre los armónicos de retorno.
BREVE DESCRIPCIÓN DE LOS DIBUJOS
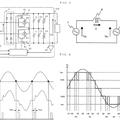
La Figura 1 es un diagrama de bloques funcional que principalmente representa una configuración de una unidad de control del convertidor según una realización de la presente invención. La Figura 2 representa un flujo de los procesos realizados mediante la unidad 20 de control del convertidor mostrada en la Figura 1. La Figura 3 muestra detalles del procesamiento realizado mediante un bloque de procesamiento de la conversión A/D â?¢ procesamiento de la entrada de señal mostrado en la Figura 2. La Figura 4 representa una configuración de un controlador aplicado a un vehículo eléctrico de CA que tiene una configuración diferente de la que se muestra en la Figura 1. La Figura 5 representa una configuración de un controlador aplicado a un vehículo eléctrico de CA que tiene una configuración diferente de las que se muestran en las Figuras 1 y 4.
EXPLICACIONES DE LETRAS O NÚMEROS 1 pantógrafo 2 transformador principal 3 convertidor PWM 4 carga 6a a 6d convertidor A/D 7a, 7b filtro 8 unidad generadora de onda sinusoidal fundamental 9 unidad generadora de onda cosenoidal 10a a 10c amplificador operacional 11a a 11e sumador/restador 12 multiplicador 13 unidad de control de tensión constante 14 unidad generadora de portadora 15 unidad generadora de señal PWM 18 línea aérea 20 unidad de control del convertidor 21 primera unidad de procesamiento aritmético 22 segunda unidad de procesamiento aritmético 23 tercera unidad de procesamiento aritmético 24 cuarta unidad de procesamiento aritmético 25 quinta unidad de procesamiento aritmético 26 sexta unidad de procesamiento aritmético 31 bloque 31 de procesamiento de la conversión A/D â?¢ procesamiento de la entrada de señal 32A primer bloque de procesamiento aritmético 32B segundo bloque de procesamiento aritmético 32C tercer bloque de procesamiento aritmético 33A cuarto bloque de procesamiento aritmético 33B quinto bloque de procesamiento aritmético 34A sexto bloque de procesamiento aritmético 34B séptimo bloque de procesamiento aritmético (procesamiento de la generación de onda portadora) 35 octavo bloque de procesamiento aritmético (procesamiento de la generación de señal PWM) 36 bloque de procesamiento de señal de salida 41 primer período de procesamiento 42 segundo período de procesamiento 43 tercer período de procesamiento 44 cuarto período de procesamiento 45 quinto período de procesamiento 46 sexto período de procesamiento 51 procesamiento de conversión A/D para el voltaje Vd de CC de conversión 52 procesamiento de conversión A/D para la corriente de salida IL de conversión 53 procesamiento de conversión A/D para el voltaje Vs de la línea aérea 54 procesamiento de conversión A/D para la corriente de entrada Is de conversión 55 procesamiento de la señal de entrada para la referencia de voltaje de CC Vd* 56 procesamiento de la entrada para las constantes de ganancia G1, G2 y G3 57 procesamiento de la entrada para las constantes de filtro
MEJOR (ES) MODO (S) PARA LLEVAR A CABO LA INVENCIÓN Se explicarán a continuación ejemplos de realización de un controlador para un vehículo eléctrico de CA según la presente invención con detalle, con referencia a los dibujos adjuntos. La presente invención no se limita a las realizaciones.
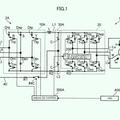
La Figura 1 es un diagrama de bloques funcional que representa principalmente una configuración de una unidad de control del convertidor según una realización de la presente invención. Se muestra un sistema de accionamiento de un vehículo eléctrico de CA en una parte superior y se muestra una unidad 20 de control de conversión que constituye un sistema de control del vehículo eléctrico de CA en una parte inferior.
En la Figura 1, el sistema de accionamiento del vehículo eléctrico de CA incluye un pantógrafo 1 en el que se introduce la alimentación de CA desde una línea aérea de CA 18, un transformador... [Seguir leyendo]
Reivindicaciones:
1. Un controlador (20) para un vehículo eléctrico de CA que se aplica a un vehículo eléctrico de CA que tiene un convertidor (3) de modulación de ancho de pulso (PWM) que convierte una tensión de CA introducida desde una línea aérea (18) a través de un transformador (2) en una tensión de CC, y que comprende una unidad de control del convertidor que controla una operación del convertidor (3) de PWM, en el que la unidad de control del convertidor se divide en múltiples unidades de procesamiento aritmético configuradas mediante una matriz de puertas programables in situ (FPGA) , y las unidades de procesamiento aritmético se adaptan para cambiar a corresponder a un cambio en la especificación del vehículo eléctrico de CA y, además se configuran mediante la FPGA para incluir:
una primera unidad de procesamiento aritmético (32A) que calcula una cantidad de corrección de tensión de CC basada en una referencia de tensión de CC predeterminado y en una tensión de CC del convertidor PWM para sacar la cantidad de corrección de tensión de CC; una tercera unidad de procesamiento aritmético (32C) que realiza el procesamiento simultáneamente en paralelo con la primera unidad de procesamiento aritmético, y calcula una onda sinusoidal fundamental basada en una tensión de línea aérea a través de un filtro para sacar la onda sinusoidal fundamental; una cuarta unidad de procesamiento aritmético (33A) que calcula una primera cantidad de corrección asociada con la generación de una tensión de referencia del convertidor, en base a la cantidad de corrección de tensión de CC, la onda sinusoidal fundamental y una corriente de entrada del convertidor PWM para sacar la primera cantidad de corrección; una quinta unidad de procesamiento aritmético (33B) que realiza el procesamiento simultáneamente en paralelo con la cuarta unidad de procesamiento aritmético, y calcula una segunda cantidad de corrección asociada con la generación de la referencia de tensión del convertidor, en base a una salida del filtro de la tensión de línea aérea y a la corriente de entrada del convertidor PWM para sacar la segunda cantidad de corrección; y una sexta unidad de procesamiento (34A) que calcula la referencia de tensión del convertidor en base a la primera y segunda cantidades de corrección para sacar la referencia de tensión del convertidor.
2. El controlador (20) para un vehículo eléctrico de CA según la reivindicación 1, en el que el vehículo eléctrico de CA tiene una multitud de convertidores PWM (3a, 3b) que convierten una tensión de CA introducida desde una línea aérea a través de un transformador en una tensión de CC, y que comprende una unidad de control del convertidor que controla las operaciones de los convertidores PWM (3a, 3b ) que se conectan en paralelo a una carga (4) .
3. El controlador (20) para un vehículo eléctrico de CA según las reivindicaciones 1 o 2, en el que las unidades de procesamiento aritmético configuradas mediante la FPGA incluyen una segunda unidad de procesamiento aritmético (32B) que realiza el procesamiento simultáneamente en paralelo con la primera y tercera unidades de procesamiento aritmético (32A, 32C) , y calcula una cantidad de alimentación directa para la corriente de entrada de los convertidores PWM basada en una corriente de salida de los convertidores PWM para sacar la cantidad de alimentación directa.
4. El controlador (20) para un vehículo eléctrico de CA según las reivindicaciones 1 o 2, en el que las unidades de procesamiento aritmético configuradas mediante la FPGA incluyen:
una séptima unidad aritmética (34B) que realiza el procesamiento simultáneamente en paralelo con la sexta unidad de procesamiento aritmético (34A) , y calcula una portadora asociado con la generación de una señal PWM para accionar los convertidores PWM, basada en la onda sinusoidal fundamental para sacar la portadora; y una octava unidad de procesamiento aritmético (35) que calcula la señal PWM basada en la referencia de tensión del convertidor y la portadora para sacar la señal PWM.
5. El controlador (20) para un vehículo eléctrico de CA según la reivindicación 2, en el que la primera unidad de procesamiento aritmético es compartida por los convertidores PWM, y la tercera a la sexta unidades de procesamiento aritmético (32C, 33A, 33B, 34A) se proporcionan a cada uno de los convertidores PWM.
6. El controlador (20) para un vehículo eléctrico de CA según una cualquiera de las reivindicaciones 1 a 5, en el que las unidades de procesamiento aritmético configurados mediante la FPGA incluyen una unidad (31) de procesamiento de la conversión A/D â?¢ procesamiento de la entrada de señal que lee las constantes que se van a utilizar en la aritmética por las unidades de procesamiento aritmético configuradas mediante la FPGA en la adecuación temporal predeterminada dentro de cada período de procesamiento aritmético.
7. El controlador (20) para un vehículo eléctrico de CA según la reivindicación 6, en el que
la unidad (31) de procesamiento de la conversión A/D â?¢ procesamiento de la entrada de señal realiza el establecimiento o el cambio de las constantes que se van a utilizar en la aritmética por las unidades de procesamiento aritmético mediante la lectura del software.
8. El controlador (20) para un vehículo eléctrico de CA según la reivindicación 1, en el que las unidades de procesamiento aritmético configuradas mediante la FPGA además incluyen:
una segunda unidad de procesamiento aritmético (32B) que calcula una cantidad de alimentación directa para una corriente de entrada del convertidor PWM en base a una corriente de salida del convertidor PWM para sacar la cantidad de alimentación directa; una séptima unidad de procesamiento aritmético (34B) que calcula una portadora asociada con la generación de una señal PWM para accionar el convertidor PWM, basada en la onda sinusoidal fundamental para sacar la portadora; y una octava unidad de procesamiento aritmético (35) que calcula la señal PWM sobre la base de la referencia de tensión del convertidor y la portadora para sacar la señal PWM, las primera, segunda y tercera unidades aritméticas de procesamiento (32A, 32B, 32C) sometidas a procesamiento aritmético durante un primer período de transformación, la cuarta y quinta unidades aritméticas de procesamiento (33A, 33B) sometidas a procesamiento aritmético durante un segundo período de procesamiento que sigue al primer período de procesamiento, la sexta unidad de procesamiento aritmético (34A) sometida a procesamiento aritmético durante un tercer período de procesamiento que sigue al segundo período de procesamiento, la séptima unidad de procesamiento aritmético (34B) sometida a procesamiento aritmético durante el segundo y tercer períodos de procesamiento, y la octava unidad de procesamiento aritmético (35) sometida a procesamiento aritmético durante un cuarto período de procesamiento que sigue al tercer período de procesamiento.
Patentes similares o relacionadas:
Sistema de excitación con un dispositivo de protección frente a una falla de arco, del 6 de Mayo de 2020, de ABB SCHWEIZ AG: Un sistema de excitación , que comprende: un convertidor dispuesto para convertir una corriente CA en una corriente CC; un dispositivo de conmutación […]
Medios para evitar la circulación en sentido inverso, aparato de conversión de potencia, y aparato de aire acondicionado de congelación, del 6 de Noviembre de 2019, de MITSUBISHI ELECTRIC CORPORATION: Un dispositivo de conversión de potencia que comprende: un circuito rectificador configurado para rectificar la tensión de una fuente de alimentación de […]
Convertidor matricial indirecto, del 29 de Octubre de 2019, de DAIKIN INDUSTRIES, LTD.: Un convertidor matricial indirecto, que comprende: un convertidor que recibe entrada de un voltaje de CA, convierte dicho voltaje […]
 Convertidor de CA-CC, método de control del convertidor de CA-CC, dispositivo de excitación de motor, dispositivo de excitación de compresor, acondicionador de aire y dispositivo de suministro de agua caliente de tipo bomba de calor, del 25 de Septiembre de 2019, de MITSUBISHI ELECTRIC CORPORATION: Un convertidor de CA a CC que comprende:
un reactor ,
un rectificador configurado para conectarse con una fuente de […]
Convertidor de CA-CC, método de control del convertidor de CA-CC, dispositivo de excitación de motor, dispositivo de excitación de compresor, acondicionador de aire y dispositivo de suministro de agua caliente de tipo bomba de calor, del 25 de Septiembre de 2019, de MITSUBISHI ELECTRIC CORPORATION: Un convertidor de CA a CC que comprende:
un reactor ,
un rectificador configurado para conectarse con una fuente de […]
Dispositivo inversor regenerativo y dispositivo inversor que utiliza una celda de energía unitaria, del 17 de Julio de 2019, de LSIS Co., Ltd: Un dispositivo inversor regenerativo, que comprende: una unidad de convertidor configurada para recibir energía de CA monofásica para producir energía de CC; […]
 Circuito convertidor de potencia y acondicionador de aire, del 26 de Abril de 2019, de DAIKIN INDUSTRIES, LIMITED: Un circuito convertidor de potencia que está conectado a una fuente de alimentación (E3) de AC trifásica a través de la primera a tercera líneas (Lr, […]
Circuito convertidor de potencia y acondicionador de aire, del 26 de Abril de 2019, de DAIKIN INDUSTRIES, LIMITED: Un circuito convertidor de potencia que está conectado a una fuente de alimentación (E3) de AC trifásica a través de la primera a tercera líneas (Lr, […]
Transformador CA/CC y unidad de accionamiento del compresor y acondicionador de aire que lo utiliza, del 3 de Abril de 2019, de MITSUBISHI ELECTRIC CORPORATION: Un transformador CA-CC que comprende: un rectificador conectado a un suministro de energía en CA por medio de un reactor ; una pluralidad […]
Aparato convertidor de potencia, aparato accionador de motores y aparato de refrigeración y aire acondicionado, del 27 de Marzo de 2019, de MITSUBISHI ELECTRIC CORPORATION: Convertidor elevador que comprende: un circuito rectificador que rectifica voltaje de un suministro de alimentación; un inductor que está […]