Controlador de motor de CC sin escobillas.
Un controlador de un motor de CC sin escobillas (11), que comprende:
medios de conversión CC/CA (12) que comprenden un elemento de conmutación para convertir una tensión de CC en una tensión de CA en función de una señal PWM mediante la apertura y el cierre del elemento de conmutación para suministrarla al motor de CC sin escobillas (11) que presenta polos magnéticos, cuyo número es n;
medios de control de tensión (14) para proporcionar una forma de onda de tensión;
una tabla de conmutación de frecuencia de portadora (71) fijada con anterioridad para conmutar una frecuencia de portadora de la señal PWM;
medios de conmutación de frecuencia de portadora (72) para conmutar la frecuencia de portadora; y
medios de control PWM (15) para generar una señal PWM;
en el que la tabla de conmutación de frecuencia de portadora (71) tiene un contenido de tabla fijado con anterioridad mediante una condición predeterminada, y la señal PWM se genera mediante los medios de conmutación de frecuencia de portadora (72) en función de la tabla de conmutación de frecuencia de portadora (71);
caracterizado por
medios de detección de fuerza contraelectromotriz (13) para detectar fuerza contraelectromotriz del motor de CC sin escobillas (11);
en el que los medios de control de tensión (14) proporcionan la forma de onda de tensión basándose en información de posición polar magnética proporcionada por los medios de detección de fuerza contraelectromotriz (13);
en el que los medios de control PWM (15) generan la señal PWM en función de salidas de los medios de detección de fuerza contraelectromotriz (13) y de los medios de conmutación de frecuencia de portadora (72); en el que los medios de conmutación de frecuencia de portadora (72) conmutan la frecuencia de portadora fc basándose en información del número de revoluciones obtenido por los medios de detección de fuerza contraelectromotriz (13) y del contenido de tabla de la tabla de conmutación de frecuencia de portadora (71) de modo que el caso en que fm ≥ 2/(3 x n x m), siendo m un número natural, no se produce, y de modo que una cantidad de fluctuación cuando el número de revoluciones del motor de CC sin escobillas (11) que presenta los n polos magnéticos aumenta o disminuye está limitada en un intervalo predeterminado, en el que la cantidad de fluctuación Δfmu cuando el número de revoluciones aumenta se expresa como:
Δfmu ≥ 2 / {2 / fm - 3 · n · (1 - RENDIMIENTO) / fc} - fm
y la cantidad de fluctuación Δfmd cuando el número de revoluciones disminuye se expresa como:
Δfmd ≥ fm -2 / {2 / fm + 3 ·n · (1- RENDIMIENTO) / fc},
siendo fm el número de revoluciones del motor de CC sin escobillas (11) y siendo RENDIMIENTO el rendimiento de la señal PWM.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E04012314.
Solicitante: PANASONIC CORPORATION.
Nacionalidad solicitante: Japón.
Dirección: 1006, OAZA KADOMA KADOMA-SHI OSAKA 571-8501 JAPON.
Inventor/es: HASEGAWA,HIROKI, HIGASHI,MITSUHIDE, TANI,YUUJI.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- H02P6/08 ELECTRICIDAD. › H02 PRODUCCION, CONVERSION O DISTRIBUCION DE LA ENERGIA ELECTRICA. › H02P CONTROL O REGULACION DE MOTORES ELÉCTRICOS, GENERADORES ELECTRICOS O CONVERTIDORES DINAMOELECTRICOS; CONTROL DE TRANSFORMADORES, REACTANCIAS O BOBINAS DE CHOQUE. › H02P 6/00 Disposiciones para el control de motores síncronos u otros motores dinamoeléctricos mediante conmutación electrónica en función de la posición del rotor; Conmutadores electrónicos a este fin (control vectorial H02P 21/00). › Disposiciones para el control de la velocidad o el par de un solo motor (H02P 6/10, H02P 6/28 tienen proridad).
- H02P6/10 H02P 6/00 […] › Disposiciones para el control de la ondulación del par motor, p. ej. asegurando una ondulación reducida del par motor.
- H02P6/18 H02P 6/00 […] › sin elementos separados para detectar la posición.
PDF original: ES-2518941_T3.pdf

Fragmento de la descripción:
Controlador de motor de CC sin escobillas.
ANTECEDENTES DE LA INVENCIÓN Campo de la invención
La presente invención se refiere a un controlador de un motor de CC sin escobillas.
Descripción de la técnica anterior
Convencionalmente, como procedimiento para proporcionar un sistema de control de inversor en el que no existe una región libre en una región de funcionamiento de un motor eléctrico tal como un motor de CC sin escobillas y sin 15 sensores, y un funcionamiento estable se lleva a cabo en una región completa del número de revoluciones, en un sistema de control de inversor que comprende un motor eléctrico que incluye un rotador que presenta una pluralidad de polos magnéticos, un inversor que aplica una tensión de salida de inversor, que depende de una señal de activación, al motor eléctrico con el fin de activar el motor eléctrico, un circuito de detección de posición polar magnética que detecta una posición del polo magnético del motor eléctrico y un controlador de inversor que genera 20 una señal de activación que depende de la posición del polo magnético y una frecuencia de portadora predeterminada y que la transmite al inversor, se considera un controlador de inversor que varía la frecuencia de portadora predeterminada a otra frecuencia de portadora y que genera la señal de activación cuando la frecuencia de portadora predeterminada pasa a ser un múltiplo integral de una frecuencia de la tensión de salida de inversor, o un controlador de inversor que varía la frecuencia de portadora predeterminada a otra frecuencia de portadora que 25 se fija para corresponderse con una relación predeterminada y que genera la señal de activación cuando el número de revoluciones del motor eléctrico calculado según la posición del polo magnético y la frecuencia de portadora predeterminada pasan a ser la relación predeterminada. Además, según un procedimiento de control que también se ha diseñado, cuando un estado en el que una frecuencia de portadora predeterminada que coincide con un múltiplo integral de una frecuencia de una tensión de salida de inversor pasa a un estado en el que la frecuencia de 30 portadora predeterminada no coincide con el múltiplo integral de la frecuencia de la tensión de salida de inversor, la frecuencia de portadora predeterminada varía a otra frecuencia de portadora fijada en función del estado, generándose entonces una señal de activación (véase el documento de patente 1: publicación de patente japonesa pendiente de examen n.° 2002-101684 ([0015] a [0024] y la fig. 1, por ejemplo)).
Además, como procedimiento para seleccionar una frecuencia de portadora apropiada con el fin de impedir una oscilación o ruido, se ha diseñado un procedimiento de control para hallar con anterioridad de manera experimental características de una frecuencia de portadora óptima para el número de revoluciones y de tenerlas disponibles como una base de datos en un circuito de conmutación de frecuencia de portadora. Según un enfoque que muestra un ejemplo de un patrón de control de la frecuencia de portadora, la frecuencia de portadora se fija a un valor 40 elevado en una región con un número de revoluciones relativamente bajo y la frecuencia de portadora se fija a un valor reducido en una región en la que el número de revoluciones es diferente al anterior. Además, según otro ejemplo de un patrón de control de la frecuencia de portadora, existe un ejemplo en el que la frecuencia de portadora en la región del bajo número de revoluciones se fija a un valor elevado y permanece constante, y la frecuencia de portadora se reduce linealmente hacia una región de revoluciones a alta velocidad diferente a la 45 anterior; como otro ejemplo, la frecuencia de portadora se fija a un valor elevado en la región del bajo número de revoluciones y la frecuencia de portadora se reduce a medida que el número de revoluciones aumenta de manera escalonada. Sus patrones de control se han diseñado como un procedimiento para impedir la resonancia que se genera cuando el número de revoluciones coincide con la frecuencia de portadora (véase el documento de patente 2: publicación de patente japonesa pendiente de examen n.° 2002-186787 ([0052] a [0054] y la fig. 1, por ejemplo)). 50
Según la publicación de patente japonesa pendiente de examen n.° 2002-101684, cuando una frecuencia de portadora pasa a ser una relación predeterminada del número de revoluciones del motor o una frecuencia de una tensión de salida de inversor, una frecuencia de portadora predeterminada varía a otra frecuencia de portadora que se fija para corresponderse con la relación predeterminada, generándose una señal de activación. Sin embargo, 55 puesto que no hay margen en el número de revoluciones cuando la frecuencia de la tensión de inversor pasa a ser la relación predeterminada ni en el número de revoluciones en el momento de la resonancia, la oscilación y el ruido aumentan. Además, según la relación predeterminada, aunque solo se define como un múltiplo integral, su fórmula o su base numérica no se tienen en cuenta en absoluto, de modo que su obtención es inadecuada para diseñar de manera óptima el número de revoluciones del motor y la frecuencia de portadora.
Según la publicación de patente japonesa pendiente de examen n.° 2002-186787, puesto que las características de la frecuencia de portadora óptima para el número de revoluciones solo se obtienen de manera experimental, las características de la frecuencia de portadora óptima para el número de revoluciones no son claras. Además, aunque 5 se muestra el ejemplo en el que la frecuencia de portadora aumenta en una reglón en la que el número de revoluciones del motor está a baja velocidad y la frecuencia de portadora disminuye a medida que el número de revoluciones aumenta según el ejemplo del patrón de control de la frecuencia de portadora, cuando un dispositivo de baja velocidad se usa en la reglón en la que el número de revoluciones está a una velocidad relativamente alta, la precisión de la detección posiclonal disminuye y el control se vuelve inestable. Como resultado, tiene que usarse un 10 dispositivo caro de alta velocidad. Además, puesto que la frecuencia de portadora aumenta en la región en la que el número de revoluciones del motor está a una velocidad relativamente baja, la eficacia del Inversor se degrada y el ruido aumenta.
En el documento JP 2000 083 396 se describe un procedimiento de activación de un motor sin escobillas. Un 15 engranaje de activación de motor sin escobillas suministra potencia a una bobina trifásica mediante un control PWM de un elemento de conmutación de una parte de inversor. En el engranaje de activación de motor sin escobillas, el procedimiento de activación del motor sin escobillas introduce una frecuencia de portadora para el control PWM del elemento de conmutación como un parámetro de una parte de fijación de parámetros para el control PWM del elemento de conmutación mediante la frecuencia de portadora. Aquí, un microordenador controla mediante PWM 20 seis elementos de conmutación de activación generando una frecuencia de portadora seleccionada en la parte de fijación de parámetros. Por tanto, el procedimiento de activación del documento JP 2000 083 396 tiene como objetivo proporcionar un procedimiento de activación de un motor sin escobillas capaz de evitar la resonancia con un equipo montado y de suprimir el ruido y el aumento de la temperatura.
RESUMEN DE LA INVENCIÓN
La presente invención se ha realizado para solucionar los problemas anteriores y es un objeto de la presente invención implementar fácilmente un funcionamiento estable en una región completa del número de revoluciones, incluso cuando se usa un dispositivo de baja velocidad, exponiendo de manera concisa un mecanismo de una 30 relación entre el número de revoluciones y una frecuencia de portadora en la que un motor de CC sin escobillas se vuelve inestable, y expresando matemáticamente el número de revoluciones y la frecuencia de portadora en la que se vuelve inestable.
Este objeto se consigue según la presente invención mediante un controlador de un motor de CC sin escobillas 35 como el descrito en la reivindicación 1 adjunta.
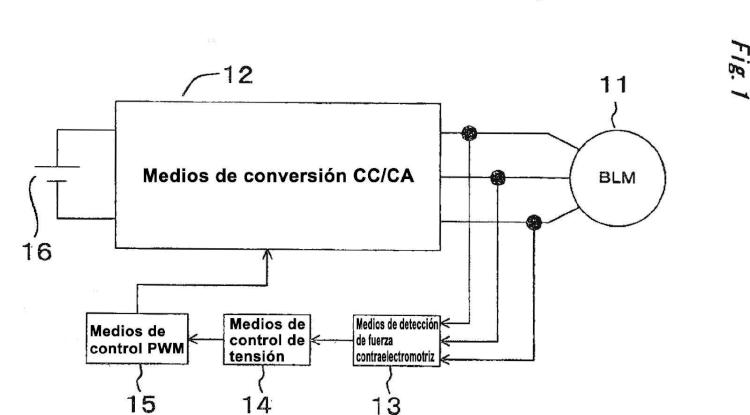
Un mecanismo de los problemas anteriores se examina con referencia a las flgs. 1 a 6. La fig. 1 es un diagrama básico de bloques de control de activación de un motor de CC sin escobillas, que consiste en un motor de CC sin escobillas 11, en medios de conversión CC/CA 12 que comprenden un elemento de conmutación para convertir una 40 tensión de CC en una tensión de CA en función de una señal PWM mediante la apertura y el cierre del elemento de conmutación y para suministrarla al motor de CC sin escobillas 11, en medios de detección de fuerza contraelectromotriz... [Seguir leyendo]
Reivindicaciones:
1. Un controlador de un motor de CC sin escobillas (11), que comprende:
medios de conversión CC/CA (12) que comprenden un elemento de conmutación para convertir una tensión de CC en una tensión de CA en función de una señal PWM mediante la apertura y el cierre del elemento de conmutación para suministrarla al motor de CC sin escobillas (11) que presenta polos magnéticos, cuyo número es n;
medios de control de tensión (14) para proporcionar una forma de onda de tensión;
una tabla de conmutación de frecuencia de portadora (71) fijada con anterioridad para conmutar una frecuencia de portadora de la señal PWM;
medios de conmutación de frecuencia de portadora (72) para conmutar la frecuencia de portadora; y 15
medios de control PWM (15) para generar una señal PWM;
en el que la tabla de conmutación de frecuencia de portadora (71) tiene un contenido de tabla fijado con anterioridad mediante una condición predeterminada, y la señal PWM se genera mediante los medios de conmutación de 20 frecuencia de portadora (72) en función de la tabla de conmutación de frecuencia de portadora (71);
caracterizado por
medios de detección de fuerza contraelectromotriz (13) para detectar fuerza contraelectromotriz del motor de CC sin 25 escobillas (11);
en el que los medios de control de tensión (14) proporcionan la forma de onda de tensión basándose en información de posición polar magnética proporcionada por los medios de detección de fuerza contraelectromotriz (13);
en el que los medios de control PWM (15) generan la señal PWM en función de salidas de los medios de detección de fuerza contraelectromotriz (13) y de los medios de conmutación de frecuencia de portadora (72);
en el que los medios de conmutación de frecuencia de portadora (72) conmutan la frecuencia de portadora fe basándose en información del número de revoluciones obtenido por los medios de detección de fuerza 35 contraelectromotriz (13) y del contenido de tabla de la tabla de conmutación de frecuencia de portadora (71) de modo que el caso en que fm = 2/(3 x n x m), siendo m un número natural, no se produce, y de modo que una cantidad de fluctuación cuando el número de revoluciones del motor de CC sin escobillas (11) que presenta los n polos magnéticos aumenta o disminuye está limitada en un intervalo predeterminado, en el que la cantidad de fluctuación Afmu cuando el número de revoluciones aumenta se expresa como:
Afmu = 2 / {2 / fm - 3 n (1 - RENDIMIENTO) / fe} - fm
y la cantidad de fluctuación Afmd cuando el número de revoluciones disminuye se expresa como:
Afmd = fm -2/{2 / fm + 3 n (1- RENDIMIENTO) / fe},
siendo fm el número de revoluciones del motor de CC sin escobillas (11) y siendo RENDIMIENTO el rendimiento de la señal PWM.
2. El controlador del motor de CC sin escobillas (11) según la reivindicación 1,
en el que el número de revoluciones del motor de CC sin escobillas (11) y la frecuencia de portadora se fijan mediante la condición predeterminada, de modo que el número de revoluciones del motor de CC sin escobillas (11) que presenta n polos magnéticos puede no coincidir con 2 / (3 n m) veces la frecuencia de portadora de la señal 55 PWM (m es un número natural).
3. El controlador del motor de CC sin escobillas (11) según la reivindicación 1,
en el que el número de revoluciones del motor de CC sin escobillas (11) y la frecuencia de portadora se fijan
mediante la condición predeterminada, de modo que el número máximo de revoluciones del motor de CC sin escobillas (11) que presenta n polos magnéticos puede no ser mayor que 2 / (3 n k) veces la frecuencia de portadora de la señal PWM (k es un número natural).
4. El controlador del motor de CC sin escobillas (11) según la reivindicación 2,
en el que el número natural m es un número impar en un caso de un troceado alterno PWM de ramas superior e inferior.
5. El controlador del motor de CC sin escobillas (11) según la reivindicación 2,
en el que el número natural m es un número par en un caso de un troceado PWM de rama superior o de un troceado PWM de rama inferior.
6. El controlador del motor de CC sin escobillas (11) según la reivindicación 3,
en el que el número natural k es tal que k>5 en un caso de un troceado alterno PWM de ramas superior e inferior.
7. El controlador del motor de CC sin escobillas (11) según la reivindicación 3,
en el que el número natural k es tal que k>5 en un caso de un troceado PWM de rama superior o de un troceado PWM de rama inferior.
Patentes similares o relacionadas:
Controlador, del 16 de Octubre de 2019, de Aeristech Control Technologies Limited: Un sistema de control para un motor o generador de imán permanente que incluye tres bobinados de fase individuales, bobinado de fase A, bobinado […]
Procedimiento de control implementado para controlar dos motores eléctricos síncronos de imán permanente conectados en paralelo, del 14 de Agosto de 2019, de SCHNEIDER TOSHIBA INVERTER EUROPE SAS: Procedimiento de control implementado en un convertidor de potencia que comprende una salida conectada a dos motores (Mot1, Mot2) eléctricos […]
Circuito de control y procedimiento de regulación para máquina síncrona, del 10 de Julio de 2019, de SIRONA DENTAL SYSTEMS GMBH: Circuito de control para una máquina síncrona de una pieza de mano dental, que presenta una alimentación de tensión , caracterizado por que el circuito de control presenta […]
Máquina de trabajo agrícola, del 22 de Mayo de 2019, de PÖTTINGER Landtechnik GmbH: Máquina de trabajo agrícola en forma de un remolque autocargador que se puede montar en un tractor , con un recolector que está provisto de un […]
Sistema y método para monitorizar y controlar un motor eléctrico sin escobillas, del 26 de Abril de 2019, de Embraco Indústria de Compressores e Soluções em Refrigeração Ltda: Sistema para la monitorización y control de un motor sin escobillas, siendo el motor trifásico y asociable con una fuente de energía eléctrica por medio de un rectificador, […]
Freno de detención para vehículos de motor sobre raíles, del 3 de Abril de 2019, de Siemens Mobility GmbH: Vehículo de motor sobre raíles con un freno de detención, estando realizado el freno de detención por medio de al menos una máquina eléctrica , que presenta un rotor […]
Aparato de detección de la posición del polo magnético para máquinas síncronas, del 3 de Abril de 2019, de MITSUBISHI ELECTRIC CORPORATION: Un aparato de detección de la posición del polo magnético para máquinas síncronas, que comprende: - un medio de circuito , para convertir […]
Compresor, del 25 de Febrero de 2019, de DAIKIN INDUSTRIES, LTD.: Un compresor que emplea CH2F2 (R32) como refrigerante único, o CH2F2 (R32) como refrigerante mixto rico en el que CH2F2 (R32) excede el 50 %, en el que el compresor […]