CONTROL DEL CAMBIO DE VELOCIDADES EN VEHICULOS A MOTOR.
Un procedimiento para controlar el cambio de velocidades en un vehículo a motor cuando se arranca o durante el trayecto,
comprendiendo las etapas de realizar continuamente simulaciones de ordenador de la futura conducción del vehículo, por lo menos en respuesta a la información sobre la pendiente de la carretera y la posición de abertura de la regulación (330), para un conjunto de diferentes planificaciones del cambio de velocidades que comprenden combinaciones de velocidades del motor cuando se cambia de velocidades y etapas de cambio y la selección de una planificación del cambio de velocidades a partir de dicho conjunto de planificaciones del cambio de velocidades el cual es óptimo con respecto al criterio seleccionado y en el que dicho conjunto de diferentes planificaciones del cambio de velocidades está caracterizado porque comprende planificaciones del cambio de velocidades en donde una o más velocidades se omiten
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E07005452.
Solicitante: VOLVO LASTVAGNAR AB.
Nacionalidad solicitante: Suecia.
Dirección: FOTBOLLSVAGEN 31,424 33 ANGERED.
Inventor/es: ERIKSSON, ANDERS, STEEN, MARCUS.
Fecha de Publicación: .
Fecha Solicitud PCT: 30 de Octubre de 2002.
Fecha Concesión Europea: 7 de Abril de 2010.
Clasificación Internacional de Patentes:
- B60W10/06 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60W CONTROL CONJUGADO DE VARIAS SUBUNIDADES DE UN VEHICULO DE DIFERENTE TIPO O FUNCION; SISTEMAS DE CONTROL ESPECIALMENTE ADAPTADOS PARA VEHICULOS HIBRIDOS; SISTEMAS DE CONTROL DE LA CONDUCCION DE VEHICULOS TERRESTRES NO RELACIONADOS CON EL CONTROL DE UNA SUBUNIDAD PARTICULAR. › B60W 10/00 Control conjugado de subunidades de vehículo de diferentes tipos o funciones (para propulsión de vehículos de tracción exclusivamente eléctrica con una fuente de energía interior al vehículo B60L 50/00 - B60L 58/00). › incluyendo el control de motores de combustión.
- B60W10/10D1
- B60W10/10D9
- B60W30/18K
- F02D41/02C2S
- F16H61/02E1M
Clasificación PCT:
- B60W10/06 B60W 10/00 […] › incluyendo el control de motores de combustión.
- B60W10/10 B60W 10/00 […] › incluyendo el control de cajas de cambio de velocidades.
- B60W30/18 B60W […] › B60W 30/00 Funciones de sistemas de ayuda a la conducción de vehículos terrestres no relacionados con el control de una subunidad particular, p.ej. sistemas que utilizan el control conjugado de varias subunidades del vehículo. › Propulsión del vehículo.
- F16H61/02 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F16 ELEMENTOS O CONJUNTOS DE TECNOLOGIA; MEDIDAS GENERALES PARA ASEGURAR EL BUEN FUNCIONAMIENTO DE LAS MAQUINAS O INSTALACIONES; AISLAMIENTO TERMICO EN GENERAL. › F16H TRANSMISIONES. › F16H 61/00 Funciones internas de las unidades de control para cambios de velocidad o para mecanismos de inversión de las transmisiones que transmiten un movimiento rotativo. › caracterizadas por las señales utilizadas.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Finlandia, Chipre.
Fragmento de la descripción:
Control del cambio de velocidades en vehículos a motor.
La presente invención se refiere a un vehículo a motor con un embrague y una trasmisión automática entre el motor y las ruedas motrices del vehículo, comprendiendo una primera unidad de control electrónica para controlar el motor, una segunda unidad de control electrónica para controlar la transmisión según una posición seleccionada para un selector de velocidades electrónico en donde la segunda unidad de control con el selector de velocidades en la posición de cambio automático, cuando arranca o durante el trayecto, selecciona una velocidad la cual está determinada por una estrategia de selección de velocidades almacenada en la segunda unidad de control como una función de diversos parámetros alimentados dentro de la segunda unidad de control.
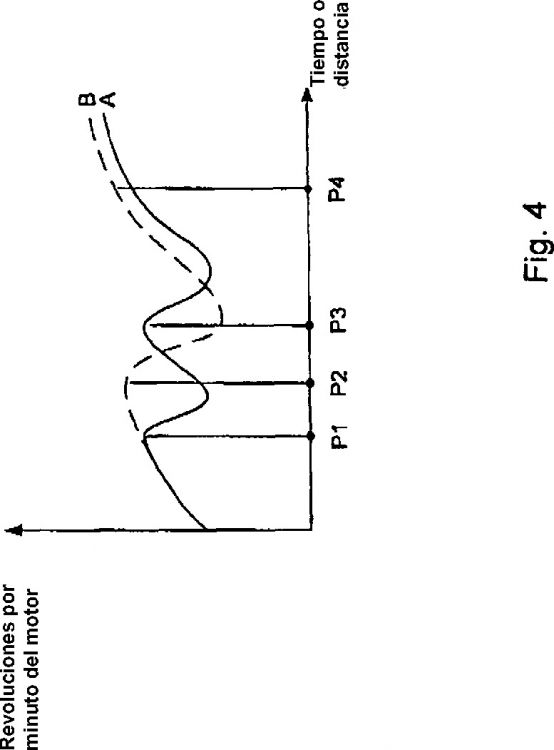
En los vehículos de este tipo existen actualmente unidades de control con una estrategia almacenada de selección de las velocidades, esto es, una secuencia de cambio basada en el tiempo como una función de la pendiente de la carretera, por ejemplo. Una tecnología conocida se describe en el documento US-A-5 832 400. Para vehículos con una trasmisión automática convencional, en donde la trasmisión cambia secuencialmente con un convertidor del momento de torsión, existe una estrategia de selección de las velocidades sobre la base de un algoritmo el cual tiene en cuenta un punto de medición en la topología de los alrededores del vehículo con la posición instantánea del vehículo como un punto de referencia. Determinando, por diversos procedimientos, dónde estará el vehículo después de un cierto intervalo de tiempo, es posible modificar el ajuste del motor y los puntos del cambio para la trasmisión automática, esto es, a qué revoluciones por minuto debe cambiarse hacia arriba o hacia abajo la trasmisión. Posibles variantes pueden ser utilizar mapas electrónicos junto con un sistema de posicionamiento (por ejemplo, un sistema de posicionamiento global, GPS) o extrapolar una posición futura para el vehículo. Una desventaja de este sistema es que no tiene en cuenta cómo varía la carretera en elevación entre dos puntos de medición y por lo tanto en ciertos casos no se tienen en cuenta los puntos extremos (por ejemplo, la cima de una colina) entre los dos puntos de medición. El motor y la trasmisión se ajustan según la tecnología conocida, sobre la base de lo grande que es la diferencia en elevación entre los dos puntos de medición y la posición instantánea de la regulación. La posición de la regulación significa en este caso y en el texto siguiente tanto el control de los mandos ajustables como un pedal de acelerador.
El documento US-A-5 832 400 únicamente tiene en cuenta, como ha sido mencionado, un único punto de medición durante un cierto tiempo o distancia de cara al futuro, para ver si el momento de torsión instantáneo del motor será suficiente, o si es necesario volver a ajustar el motor o la trasmisión. También se describe cómo se puede utilizar una pluralidad de puntos de medición, pero en ese caso se utiliza un valor medio de los mismos, proporcionando de ese modo un valor para la fuerza de accionamiento requerida. Con una trasmisión la cual es cambiada secuencialmente y con el procedimiento que se acaba de describir, existe incertidumbre en el sistema lo cual resulta en consecuencias tangibles en forma de una función de control de los mandos menos que satisfactoria, una aceleración no uniforme y unas emisiones de escape innecesariamente grandes.
El documento US 5,931,886 revela un procedimiento genérico de control del cambio de velocidades para un vehículo, en el que se supervisa una cierta distancia por delante del vehículo y se determina si una planificación del cambio de velocidades (primera) previamente establecida conducirá a un cambio hacia abajo desde este una primera etapa de velocidades hasta una segunda etapa de velocidades seguida por un cambio hacia arriba de nuevo a la primera etapa de velocidades. Si, y sólo si, la primera planificación del cambio de velocidades condujera a un cambio hacia abajo de este tipo seguido por un cambio hacia arriba, se calcula el régimen de consumo de combustible sobre la base de una segunda planificación del cambio de velocidades, en la cual no existe cambio a la segunda etapa de velocidades. La segunda planificación del cambio de velocidades se selecciona cuando se muestra que el régimen de consumo de combustible es más elevado con la primera planificación del cambio de velocidades que con la segunda planificación del cambio de velocidades.
El propósito de la presente invención es conseguir un vehículo a motor del tipo descrito a título de introducción, el cual evite los problemas anteriormente mencionados pero que no comprometa a una estrategia de selección de las velocidades limitada, sino que alcance una decisión sobre la relación de velocidades con una entrada mucho mejor, considerando el futuro.
Esto se consigue según la invención en virtud del hecho de que una de las unidades de control está dispuesta, cuando se arranca o en el trayecto, para realizar continuamente simulaciones de ordenador, por lo menos en respuesta a la información sobre la pendiente de la carretera y la posición de abertura de la regulación, de la conducción futura del vehículo, para un conjunto de diferentes combinaciones de velocidades del motor cuando los cambios de velocidades y los incrementos del cambio, según un criterio seleccionado por un control, y la selección de una planificación del cambio de velocidades la cual será óptima en vista del criterio seleccionado y en donde dicho conjunto de diferentes planificaciones del cambio de velocidades comprende planificaciones del cambio de velocidades en donde una o más velocidades se omiten.
Además, la unidad de control selecciona una relación de velocidades de la línea de accionamiento la cual resulta en inferiores emisiones de lo que se consigue con la tecnología conocida para el tramo determinado de carretera.
En una forma de realización preferida, la segunda unidad de control está dispuesta, bajo condiciones previas establecidas, para distribuir una planificación del cambio de velocidades con una selección automática de las velocidades para un periodo de avance más largo (30 segundos o más), en donde la información sobre la posición instantánea se obtiene con la ayuda de un GPS o en donde las posiciones futuras son provistas mediante la información a partir de un mapa electrónico. El conductor puede seleccionar él mismo el criterio para la conducción, es decir escoger los coeficientes de ponderación relativos de los parámetros de control. Los parámetros de control incluyen emisiones, velocidad promedio o consumo de combustible. Si el conductor, por ejemplo, prefiere un modelo de conducción económico optimizado con un bajo consumo de combustible, el primer coeficiente de ponderación se dará al consumo de combustible y la simulación del ordenador producirá, para la ponderación del parámetro de control determinado, la planificación del cambio de velocidades que más energía ahorre. Además, se pueden seleccionar soluciones de compromiso proporcionando las ponderaciones deseadas a los respectivos parámetros de control. A fin de proporcionar una precisión adicional en el resultado de la simulación, se tienen en cuenta las variaciones individuales del motor individual, puesto que las emisiones del motor pueden ser medidas cuando se conduce en diversas situaciones de conducción y se pueden tener en cuenta para futuros ajustes del motor. Los ajustes del motor, por ejemplo, pueden variar a lo largo de la imagen de una carretera imaginada, para la cual se realiza la simulación, en contraste con la tecnología conocida, en donde el ajuste del motor tiene únicamente dos posiciones entre una posición instantánea y una posición futura. El modelo del motor es también importante para proveer información sobre las emisiones de escape del motor en diversos transitorios. La presente tecnología conocida no facilita tener en cuenta esto. Y los cambios de velocidades en la caja de velocidades no necesitan ser realizados secuencialmente. El ordenador también simula secuencias del cambio de velocidades en donde se omiten una o más velocidades.
La presente invención, según una primera forma de realización la cual utiliza un GPS y mapas electrónicos, puede realizar simulaciones las cuales son válidas relativamente lejos en el futuro, pero el riesgo de algo inesperado, por ejemplo sobre lo cual no se puede obtener información a partir del mapa electrónico, por consiguiente incrementará. El sistema tiene una sensibilidad la cual, con la ayuda de la extrapolación de...
Reivindicaciones:
1. Un procedimiento para controlar el cambio de velocidades en un vehículo a motor cuando se arranca o durante el trayecto, comprendiendo las etapas de realizar continuamente simulaciones de ordenador de la futura conducción del vehículo, por lo menos en respuesta a la información sobre la pendiente de la carretera y la posición de abertura de la regulación (330), para un conjunto de diferentes planificaciones del cambio de velocidades que comprenden combinaciones de velocidades del motor cuando se cambia de velocidades y etapas de cambio y la selección de una planificación del cambio de velocidades a partir de dicho conjunto de planificaciones del cambio de velocidades el cual es óptimo con respecto al criterio seleccionado y en el que dicho conjunto de diferentes planificaciones del cambio de velocidades está caracterizado porque comprende planificaciones del cambio de velocidades en donde una o más velocidades se omiten.
2. Procedimiento según la reivindicación 1 comprendiendo la etapa de controlar la transmisión del vehículo según la planificación de la velocidad seleccionada cuando el selector de velocidades electrónico (46) está en una posición para un cambio de velocidades automático.
3. Procedimiento según la reivindicación 1 o 2 comprendiendo las etapas de realizar las simulaciones por ordenador según un criterio seleccionado por un control (300) y la selección de la planificación del cambio de velocidades de modo que sea óptima en vista del criterio seleccionado.
4. Procedimiento según cualquiera de las reivindicaciones anteriores comprendiendo la etapa de determinar instantáneamente la posición del vehículo mediante un conjunto GPS (350) (sistema de posicionamiento global).
5. Procedimiento según la reivindicación 4 comprendiendo la etapa de la recepción de información a partir de un mapa electrónico (320) sobre la topología de los alrededores del vehículo.
6. Procedimiento según la reivindicación 3 comprendiendo la etapa de la ponderación de los parámetros de control, tales como el consumo de combustible, la velocidad promedio y las emisiones de escape según el criterio seleccionado.
7. Procedimiento según la reivindicación 1 comprendiendo la etapa de que dicho ordenador realice simulaciones sobre la conducción futura del vehículo también en respuesta a un modelo de motor almacenado.
8. Procedimiento según la reivindicación 7 en el que el modelo del motor comprende información sobre emisiones de escape del motor en diversos transitorios.
9. Procedimiento según la reivindicación 7 en el que el modelo del motor comprende un momento de torsión de estado de régimen.
Patentes similares o relacionadas:
Línea motriz de un vehículo híbrido, en particular de un vehículo industrial o comercial, del 29 de Abril de 2020, de IVECO S.P.A.: Línea motriz de un vehículo híbrido, en particular de un vehículo industrial o comercial, comprendiendo la línea motriz: - una caja de engranajes (GR) que […]
Vehículo del tipo de montar a horcajadas equipado con un aparato de transmisión automática, del 8 de Abril de 2020, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Un vehículo del tipo de montar a horcajadas equipado con un aparato de transmisión automática , incluyendo: un operador de acelerador […]
 Procedimiento para manejar un sistema, sistema, control y producto de programa de ordenador, del 26 de Febrero de 2020, de ROBERT BOSCH GMBH: Procedimiento para manejar un sistema para un vehículo de motor, comprendiendo el sistema un control , una red de a bordo de alta tensión , una […]
Procedimiento para manejar un sistema, sistema, control y producto de programa de ordenador, del 26 de Febrero de 2020, de ROBERT BOSCH GMBH: Procedimiento para manejar un sistema para un vehículo de motor, comprendiendo el sistema un control , una red de a bordo de alta tensión , una […]
CONJUNTO PARA LIMITACION DE VELOCIDAD DE FORMA AUTOMÁTICA EN VEHÍCULOS, del 20 de Noviembre de 2019, de MARTINEZ BONET, Francisco Jose: 1. Conjunto para limitación de velocidad de forma automática en vehículos caracterizado porque comprende un asistente de velocidad encargado […]
Máquina de trabajo autopropulsada así como procedimiento para frenar una máquina de trabajo de este tipo, del 6 de Noviembre de 2019, de Liebherr-Components Biberach GmbH: Máquina de trabajo autopropulsada, en particular vehículo oruga tal como una niveladora, con un accionamiento eléctrico que comprende al menos un motor […]
Máquina de trabajo autopropulsada, así como procedimiento para frenar una máquina de trabajo de esa clase, del 6 de Noviembre de 2019, de Liebherr-Components Biberach GmbH: Máquina de trabajo autopropulsada, en particular un camión volquete o camión, con un accionamiento eléctrico que comprende al menos un motor […]
Aparato de control para un vehículo y método de control para un vehículo, del 19 de Junio de 2019, de TOYOTA JIDOSHA KABUSHIKI KAISHA: Un aparato de control para un vehículo , incluyendo el vehículo un motor de combustión , un primer motor eléctrico (MG1), un elemento rotativo […]
Aparato de transmisión automática y vehículo del tipo de montar a horcajadas equipado con el aparato, del 8 de Mayo de 2019, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Un vehículo del tipo de montar a horcajadas equipado con un aparato de transmisión automática , incluyendo: un embrague incluyendo un rotador de lado […]