Conjunto de piloto automático para una unidad naval.
Un conjunto de piloto automático para una unidad naval incluyendo al menos un elemento estabilizador o direccional de popa (6) que gira alrededor de al menos un eje de articulación (7);
una unidad electrohidráulica (13) dispuesta cerca de dicho elemento estabilizador o direccional de popa (6) para girar el elemento estabilizador o direccional alrededor de dicho eje de articulación (7); y al menos una unidad electrónica de control (17) dedicada a dicha unidad electrohidráulica (13) y alojada cerca de dicha unidad electrohidráulica (13); caracterizándose el conjunto de piloto automático porque presenta una arquitectura distribuida e incluye además al menos un elemento estabilizador o direccional de proa (31, 32); otra unidad electrohidráulica (34) dedicada a y dispuesta cerca de dicho elemento estabilizador o direccional de proa, y otra unidad electrónica de control (36) dedicada a dicha otra unidad electrohidráulica (34) y alojada cerca de dicha otra unidad electrohidráulica (34); siendo dicha unidad electrónica de control (17) y dicha otra unidad electrónica de control (36) una unidad separada y recíprocamente independiente.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E06425113.
Solicitante: GE Avio S.r.l.
Nacionalidad solicitante: Italia.
Dirección: Via I Maggio 99 Rivalta di Torino (Torino) ITALIA.
Inventor/es: BUSTI,PAOLO, QUAGLIA,DARIO.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B63B39/06 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B63 BUQUES U OTRAS EMBARCACIONES FLOTANTES; SUS EQUIPOS. › B63B BUQUES U OTRAS EMBARCACIONES FLOTANTES; EQUIPAMIENTO PARA EMBARCACIONES (disposiciones relativas a la ventilación, calefacción, refrigeración o acondicionamiento de aire en los buques B63J 2/00; subestructuras flotantes como soportes de las dragas o máquinas par el movimiento de tierras E02F 9/06). › B63B 39/00 Equipo para reducir cabeceo, balanceo, o movimientos similares indeseados de embarcaciones; Aparatos para indicar la actitud de una embarcación. › que reducen los movimientos del buque por efecto de alerones que actúan sobre el agua ambiente (estructura de quillas de balanceo B63B 3/44).
- B63H25/24 B63 […] › B63H PROPULSION O GOBIERNO MARINO (propulsión de vehículos de colchón de aire B60V 1/14; especialmente adaptados para submarinos que no sean de propulsión nuclear, B63G; especialmente adaptados para torpedos F42B 19/00). › B63H 25/00 Gobierno; Disminución de marcha utilizando medios distintos a los elementos propulsores (que emplean unidades de propulsión fueraborda instaladas de forma amovible B63H 20/00 ); Anclaje o amarre dinámico, es decir, posicionamiento de los buques por medio de elementos propulsores auxiliares o principales. › por medios eléctricos.
- G05D1/00 FISICA. › G05 CONTROL; REGULACION. › G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F). › Control de la posición, del rumbo, de la altitud o de la actitud de vehículos terrestres, acuáticos, aéreos o espaciales, p. ej. piloto automático (sistemas de radionavegación o sistemas análogos que utilizan otras ondas G01S).
PDF original: ES-2510471_T3.pdf
Fragmento de la descripción:
Conjunto de piloto automático para una unidad naval
La presente invención se refiere a un conjunto de piloto automático para una unidad o medio naval.
Como es conocido, las unidades navales en general están provistas de uno o más elementos estabilizadores o direccionales dispuestos en posiciones diferentes según el tipo de unidad naval, y normalmente asociados a la porción de proa o popa, o a ambas porciones. Cada elemento estabilizador o direccional gira alrededor de su propio eje de articulación bajo el empuje de un accionador hidráulico respectivo controlado por una unidad electrohidráulica de válvula, como se describe, por ejemplo, en US 6.273.771.
Los conjuntos de válvula electrohidráulica conocidos son controlados por un conjunto de piloto automático centralizado común a todos los conjuntos de válvula, generalmente del tipo de tarjeta ¡nsertable. El conjunto de piloto automático está dispuesto en el suelo, concentrado en una zona media de la unidad naval, y está conectado por medio de cables eléctricos apropiados a los varios conjuntos de válvula electrohidráulica. Una consola de control provista de control manual y dispositivos de supervisión para las maniobras de interfaz humano/máquina también se contempla y se coloca en la misma zona media de la unidad naval, como se describe, por ejemplo, en US 6.273.771.
Los conjuntos de piloto automático conocidos del tipo descrito anteriormente tienen una serie de inconvenientes, todos ellos debidos a su disposición centralizada. Tal configuración, por una parte, permite colocarla inteligencia de control de toda la unidad naval en una zona media del medio naval, pero, por la otra, requiere la disponibilidad de grandes espacios de alojamiento y, en particular, de amplias zonas de apoyo en el suelo. Aunque se puede contemplar tales espacios y zonas de apoyo en algunos tipos de unidades navales a pesar de las considerables dificultades y los compromisos inevitables, estos son difíciles de obtener en otros tipos de unidades navales, en los que la distribución óptima de espacios es uno de los principales objetivos más ambiciosos y a menudo el más difícil de lograr.
Además, las grandes dimensiones de los conjuntos de piloto automático conocidos y su forma paralelepípeda tradicional, similar a la de los armarios de oficina ordinarios, hacen que las denominadas operaciones de remodelación, es decir, la reinstalación de aparatos de nueva generación en medios navales en servicio en sustitución de los usados ya obsoletos, sean especialmente difíciles y a menudo imposibles.
El tipo y la disposición concretos de los conjuntos de piloto automático conocidos también requiere el uso de mazos considerables de cableado eléctrico para conectar a los conjuntos de válvula electrohidráulica y a la consola de control. Tales mazos de cableado eléctrico se extienden inevitablemente por toda la longitud del medio naval ocupando espacios considerables e incrementando el peso del medio naval propiamente dicho.
Los conjuntos de piloto automático conocidos no son completamente satisfactorios ni siquiera desde el punto de vista de la seguridad, dado que todos los elementos estabilizadores o direccionales podrían ser simultáneamente incontrolables en caso de daño en la zona central de la unidad, con consecuencias imaginables para la dirección de la unidad naval.
El objeto de la presente invención es hacer un conjunto de piloto automático para unidades o medios navales, cuyas características permiten resolver de forma simple y a un precio razonable los problemas indicados anteriormente.
Según la presente invención se realiza un conjunto de piloto automático para una unidad naval incluyendo al menos una unidad estabilizadora o direccional que gira alrededor de al menos un eje de articulación, una unidad electrohidráulica dispuesta cerca de dicho elemento estabilizador o direccional para girar el elemento estabilizador o direccional alrededor de dicho eje de articulación; el conjunto de piloto automático presenta una arquitectura distribuida e incluye al menos una unidad electrónica de control dedicada a dicha unidad electrohidráulica y alojada cerca de dicha unidad electrohidráulica.
El conjunto de piloto automático para unidad naval incluye además al menos otro elemento estabilizador o direccional y otra unidad electrohidráulica dedicada a y dispuesta cerca de dicho otro elemento estabilizador o direccional, e incluye otra unidad electrónica de control de dicha otra unidad electrohidráulica; siendo dichas unidades de control electrónico separadas y recíprocamente independientes y estando alojada cada una cerca de la unidad hidráulica respectiva.
La invención se describirá ahora con referencia a los dibujos acompañantes que ilustran un ejemplo de realización no limitativo de la misma, en los que:
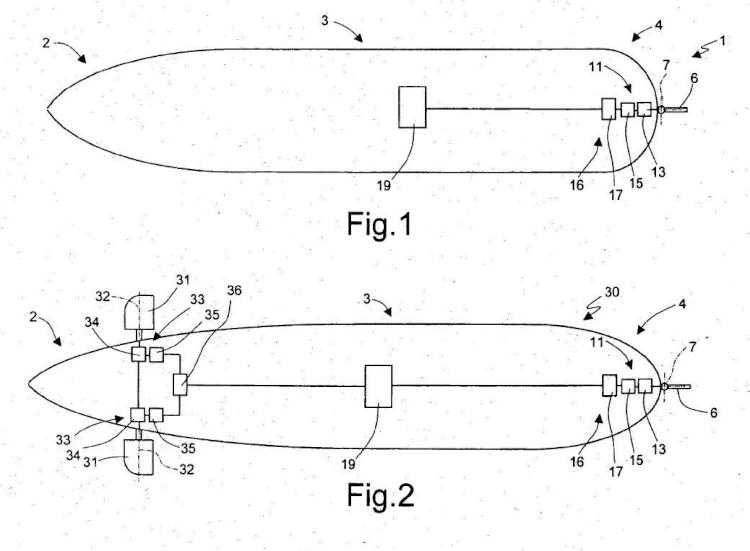
La figura 1 representa esquemática y parcialmente una unidad naval provista de una primera realización preferida del conjunto de piloto automático según la presente invención.
La figura 2 representa otra unidad naval provista de una segunda realización preferida del conjunto de piloto automático según la presente invención.
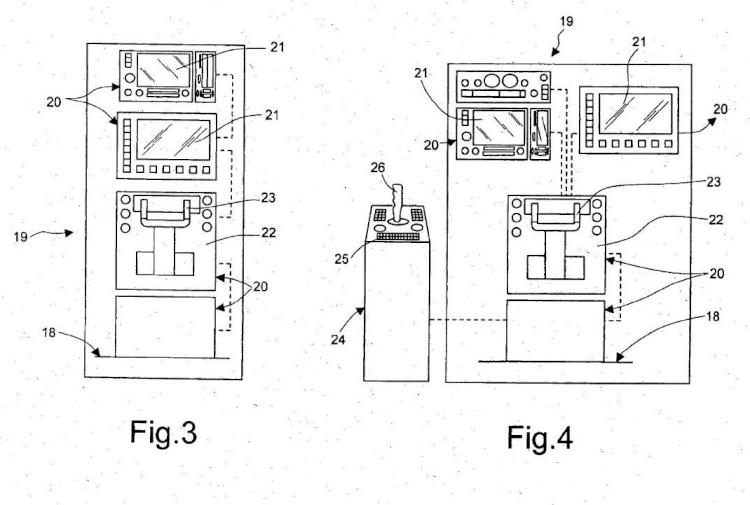
La figura 3 representa en escala muy ampliada un detalle del conjunto de piloto automático de las figuras 1 y 2.
Y la figura 4 representa una variante del conjunto de la figura 3.
En la figura 1, se Indica en conjunto con 1 una unidad o medio naval que presenta una porción de proa 2, una porción intermedia 3 y una porción de popa 4. La porción de popa 4 está acoplada a un elemento direccional o timón 6 que gira alrededor de un eje 7.
El timón 6 es controlado por una unidad electrohidráulica, Indicada con 11, alojada en la porción de popa 4 en una posición adyacente al timón 6 para girar el timón 6 propiamente dicho alrededor del eje 7. La unidad electrohidráulica 11 incluye un accionador hidráulico 13 y un respectivo conjunto de válvula dosificadora o servoválvula 15 que controla el accionador hidráulico 13 propiamente dicho.
El conjunto de válvula 15 está controlado, a su vez, por una unidad de piloto automático 16 que presenta una arquitectura distribuida y que incluye una unidad electrónica de control específicamente dedicada 17 que representa la inteligencia del control de timón 6. La unidad electrónica 17 presenta una forma paralelepípeda plana con dimensiones del orden de 300x220x80 milímetros, y se aloja dentro de la porción de popa 4 cerca de la unidad electrohidráulica 15 y, por lo tanto, también cerca del timón 6.
En el caso del detalle descrito, la unidad electrónica de control 17 está espaciada de una superficie interna del suelo 18 (figuras 3 y 4) para los ocupantes de la unidad naval y, más exactamente, está dispuesta en posición elevada con respecto a la superficie interna del suelo 18 propiamente dicho.
De nuevo con referencia a las figuras acompañantes, el conjunto de piloto automático 16 incluye además la unidad de interfaz hombre-máquina 19 alojada en la posición Intermedia 3, y por lo tanto en posición alejada con respecto a la unidad electrónica de control 17. En el ejemplo mostrado, la unidad de interfaz 19 está conectada a la unidad electrónica 17 para enviar señales de accionamiento eléctricas y recibir en respuesta señales de posición de timón.
Según una variante (no representada), el conjunto de piloto automático 16 incluye además un par de unidades electrónicas 17, que están conectadas en paralelo a la unidad electrohidráulica 15 y a la unidad de interfaz 19 formando un sistema de control redundante.
Con referencia a la figura 3, la unidad de interfaz 19 presenta una arquitectura modular distribuida e incluye una pluralidad de elementos modulares o módulos 20, de los que dos están formados por blindajes 21. Estos módulos pueden estar apilados uno en otro, como se representa en la figura 3, o dispuestos uno al lado del otro, como se representa en la figura 4, o incluso estar separados, dispuestos y conectados de la forma más conveniente, según el espacio disponible a bordo de la unidad naval. Un tercer módulo, indicado con 22, es un módulo de maniobra provisto de un volante o campana 23. Este módulo también se puede disponer en posiciones diferentes de las representadas en las figuras acompañantes según las necesidades del operador y se puede instalar con o sustituir por un módulo de maniobra adicional u opcional indicado con el número 24 incluyendo un teclado 25 y un joystick 26 y conectado eléctricamente por medio de un mazo de cables u otro sistema eléctrico para movimiento a una posición alejada con respecto a los otros módulos 20 o a cualquier otra posición elegida por el operador.
La figura 2 representa una unidad naval 30, que... [Seguir leyendo]
Reivindicaciones:
1. Un conjunto de piloto automático para una unidad naval incluyendo al menos un elemento estabilizador o direccional de popa (6) que gira alrededor de al menos un eje de articulación (7); una unidad electrohldráulica (13) dispuesta cerca de dicho elemento estabilizador o direccional de popa (6) para girar el elemento estabilizador o direccional alrededor de dicho eje de articulación (7); y al menos una unidad electrónica de control (17) dedicada a dicha unidad electrohldráulica (13) y alojada cerca de dicha unidad electrohidráullca (13); caracterizándose el conjunto de piloto automático porque presenta una arquitectura distribuida e incluye además al menos un elemento estabilizador o direccional de proa (31, 32); otra unidad electrohidráulica (34) dedicada a y dispuesta cerca de dicho elemento estabilizador o direccional de proa, y otra unidad electrónica de control (36) dedicada a dicha otra unidad electrohldráulica (34) y alojada cerca de dicha otra unidad electrohidráulica (34); siendo dicha unidad electrónica de control (17) y dicha otra unidad electrónica de control (36) una unidad separada y recíprocamente Independiente.
2. Un conjunto de piloto automático según la reivindicación 1, caracterizado porque dichas unidades de control electrónico están distanciadas recíprocamente.
3. Un conjunto según la reivindicación 2, caracterizado porque dichas unidades de control electrónico están asociadas a porciones de extremo opuesto de dicha unidad naval.
4. Un conjunto de piloto automático según cualquiera de las reivindicaciones precedentes, caracterizado porque incluye para cada unidad electrohldráulica un par respectivo de dichas unidades de control electrónico; estando conectadas en paralelo las unidades de control electrónico de cada par de unidades electrónicas a la respectiva unidad hidráulica para hacer un sistema de control redundante.
5. Un conjunto de piloto automático según cualquiera de las reivindicaciones precedentes, caracterizado porque incluye además una Interfaz hombre-máquina, y porque cada una de dichas unidades de control electrónico está dispuesta en posición remota con respecto a dicha interfaz hombre-máquina y está conectada a la unidad de interfaz para recibir señales de accionamiento eléctricas y para enviar en respuesta señales de control de posición de dichos elementos estabilizadores o dlrecclonales.
6. Un conjunto de piloto automático según la reivindicación 5, caracterizado porque dicha interfaz hombre-máquina está dispuesta en posición intermedia entre dichas unidades de control electrónico.
7. Un conjunto de piloto automático según la reivindicación 6, caracterizado porque dicha interfaz hombre-máquina presenta una arquitectura modular distribuida e incluye elementos modulares disponibles en posiciones relativamente diferentes para obtener diferentes configuraciones logísticas.
Patentes similares o relacionadas:
 Aparato automáticamente desplazable y procedimiento de guiado de tal aparato para dirigirlo a un punto de destino, del 29 de Julio de 2020, de VORWERK & CO. INTERHOLDING GMBH: Aparato automáticamente desplazable , especialmente aparato de limpieza para limpiar un suelo , tal como un robot de aspiración y/o barrido, con uno o […]
Aparato automáticamente desplazable y procedimiento de guiado de tal aparato para dirigirlo a un punto de destino, del 29 de Julio de 2020, de VORWERK & CO. INTERHOLDING GMBH: Aparato automáticamente desplazable , especialmente aparato de limpieza para limpiar un suelo , tal como un robot de aspiración y/o barrido, con uno o […]
Procedimiento de funcionamiento de un aparato de limpieza dotado de movilidad automática, del 1 de Julio de 2020, de VORWERK & CO. INTERHOLDING GMBH: Procedimiento de funcionamiento de un aparato de limpieza dotado de movilidad automática dentro de un entorno, en el que el aparato de limpieza limpia una superficie […]
DISPOSICIÓN DE MANDO, del 30 de Junio de 2020, de SEAT, S.A.: Una disposición de mando de un vehículo autónomo que modifica o ajusta una funcionalidad de conducción de un modo de conducción autónomo del […]
MÉTODO DE DETECCIÓN DE LÍNEAS DE TRANSMISIÓN DE ENERGÍA EN TIEMPO REAL CON VEHÍCULOS AÉREOS NO TRIPULADOS, del 25 de Junio de 2020, de PONTIFICIA UNIVERSIDAD JAVERIANA: La presente invención se refiere a un método para realizar la detección de líneas de transmisión de energía en una imagen capturada mediante una cámara […]
Procedimiento de control de una pluralidad de dispositivos móviles autónomos no tripulados, del 17 de Junio de 2020, de THALES: Un procedimiento de control de una pluralidad de dispositivos móviles autónomos no tripulados, el procedimiento comprende las siguientes etapas: - a) el suministro […]
Sistemas y métodos para simulación de cardán, del 3 de Junio de 2020, de SZ DJI Technology Co., Ltd: Método de simulación de control de cardán, comprendiendo dicho método: recibir una señal de modo de cardán indicativa de una selección […]
UNIDAD CENTRAL DE VEHÍCULO, del 2 de Junio de 2020, de SEAT, S.A.: Una unidad central de un vehículo comprende un procesador y un cámara de adquisición de imágenes , donde las imágenes adquiridas […]
Método para controlar el tiempo de llegada de una aeronave, del 27 de Mayo de 2020, de THE BOEING COMPANY: Un método para controlar la llegada de una aeronave a un punto de referencia objetivo, comprendiendo (a) definir un tiempo requerido de llegada (RTA) en ese punto de referencia […]