Un aparato y un método para la configuración de un dispositivo en una red.
Un método de configuración de un dispositivo (26) operable en una red (1) para funcionar de acuerdo con requisitos funcionales predeterminados para la red,
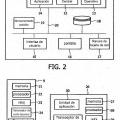
almacenados en un aparato de procesamiento de datos (10), que comprende
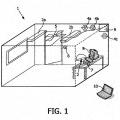
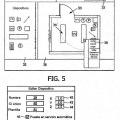
recibir información de posición para el dispositivo (26) y una indicación del tipo de dispositivo, en el aparato de procesamiento de datos (S7.5);
asociar la información de posición y el tipo de dispositivo con los requisitos funcionales almacenados (S7.6); y transmitir los requisitos funcionales para el dispositivo (26) a la red (S7.7) para configurar el dispositivo (26).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/IB2006/051921.
Solicitante: KONINKLIJKE PHILIPS N.V.
Inventor/es: KNIBBE,ENGEL J, STOMMEN,THEODOOR H.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- H04L12/28 ELECTRICIDAD. › H04 TECNICA DE LAS COMUNICACIONES ELECTRICAS. › H04L TRANSMISION DE INFORMACION DIGITAL, p. ej. COMUNICACION TELEGRAFICA (disposiciones comunes a las comunicaciones telegráficas y telefónicas H04M). › H04L 12/00 Redes de datos de conmutación (interconexión o transferencia de información o de otras señales entre memorias, dispositivos de entrada/salida o unidades de tratamiento G06F 13/00). › caracterizados por la configuración de los enlaces, p. ej. redes locales (LAN), redes extendidas (WAN) (redes de comunicación inalámbricas H04W).
- H04L29/08 H04L […] › H04L 29/00 Disposiciones, aparatos, circuitos o sistemas no cubiertos por uno solo de los grupos H04L 1/00 - H04L 27/00. › Procedimiento de control de la transmisión, p. ej. procedimiento de control del nivel del enlace.
PDF original: ES-2552724_T3.pdf

Patentes similares o relacionadas:
Sincronización de una aplicación en un dispositivo auxiliar, del 22 de Julio de 2020, de OPENTV, INC.: Un método que comprende, mediante un dispositivo de medios: acceder, utilizando un módulo de recepción, un flujo de datos que incluye contenido […]
Aprovisionamiento y configuración inalámbrica de elementos de hardware de un sistema de automatización del hogar, del 15 de Julio de 2020, de Savant Systems, Inc: Un procedimiento de aprovisionamiento y/o configuración de elementos de hardware de un sistema de automatización del hogar, que comprende: presencia publicitaria en una […]
Sistemas y métodos para proporcionar una arquitectura de enlace seguro múltiple, del 1 de Julio de 2020, de E^NAT Technologies, LLC: Un sistema para proporcionar una arquitectura de enlace seguro múltiple, MSL, comprendiendo dicho sistema: un componente de red privada virtual, […]
Dispositivo de interfaz, procedimiento y programa informático para controlar dispositivos sensores, del 10 de Junio de 2020, de Ubiquiti Inc: Un primer dispositivo de interfaz para su uso en un sistema de domótica , comprendiendo el primer dispositivo de interfaz: un módulo de comunicación […]
Método y aparato para proporcionar energía eléctrica a un acceso de línea de abonado digital de banda ancha, del 10 de Junio de 2020, de TELEFONAKTIEBOLAGET LM ERICSSON (PUBL): Un método llevado a cabo por un armario remoto que comprende un Multiplexor de Acceso de Línea de Abonado Digital (DSLAM) conectado a una red, comprendiendo el método: […]
Acceso de red híbrido inteligente, del 27 de Mayo de 2020, de DEUTSCHE TELEKOM AG: Procedimiento para la organización de una conexión de comunicaciones entre un equipo terminal de acceso "CPE" 1 del lado del cliente y un punto […]
Sistemas y métodos para el establecimiento de conexiones entre un dispositivo móvil y una red local, del 20 de Mayo de 2020, de ise Individuelle Software und Elektronik GmbH: Sistema , que comprende: uno o varios nodos de red, que se comunican entre sí a través de un primer protocolo de red, estando al menos un nodo […]
Procedimiento y aparato para gestionar un perfil de grupo en un sistema de comunicación directa por Wi-Fi, del 6 de Mayo de 2020, de SAMSUNG ELECTRONICS CO., LTD.: Un procedimiento de generación de un grupo de un dispositivo electrónico en un sistema de comunicación directa por Wi-Fi, el procedimiento […]