CONDUCTO DE PASO GIRATORIO EN EL EXTREMO DE UN BRAZO DE ROBOT.
Conducto de paso giratorio para medios gaseosos y/o líquidos así como para señales de control eléctricas y corriente de potencia,
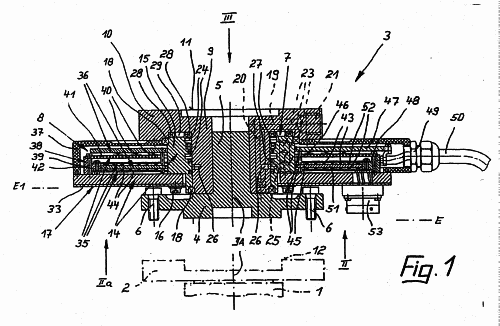
para su inclusión entre un brazo de robot (1) y una herramienta, que presenta un transmisor de medios (7) con una brida de acoplamiento (10) canalizada radialmente, una espiga hueca (9) canalizada axialmente y una línea de alimentación de medios (14) que puede girar con relación a la espiga hueca (9), pero que la abraza de forma estanca así como un transmisor de señales y corriente (8) con parte de estator (35) y parte de rotor (36) por el lado periférico de la espiga hueca (9), el cual, con relación a la parte de estator (35), está unido a la línea de alimentación de medios (14), en donde la línea de alimentación de medios (14) así como la parte de estator (35) y la parte de rotor (36) del transmisor de señales y corriente (8) están previstas en la región longitudinal de la espiga hueca (9), caracterizado porque la espiga hueca (9) se solapa con un racor axial (5) como componente de una brida adaptadora (4) que puede inmovilizarse frontalmente sobre la brida de herramienta (2) del brazo de robot (1) y está fijada en su posición sobre la misma mediante pernos roscados (13) que atraviesan la pared de la espiga hueca (9) en dirección axial paralelamente al eje de giro (DA), en donde la línea de alimentación de medios (14) está formada por un casquillo (15) fijado con relación a la parte de rotor (36) sobre la brida de acoplamiento (10), que atraviesa centralmente el transmisor de señales y corriente (8), se solapa con la espiga hueca (9) y está apoyado mediante rodamientos (18), por un lado, frente a la espiga hueca (9) y, por otro lado, frente a la brida de acoplamiento (10), con canales axiales (23) y ranuras periféricas (24) que unen estos canales axiales (23) a canales axiales (20) en la espiga hueca (9) así como cortes segmentarios (25, 26) en el casquillo (15) y en la espiga hueca (9) y por una brida de alimentación (17), unida al casquillo (15) y que presenta conexiones axiales (31) para los medios además de canales radiales (30) entre la brida adaptadora (4) y el transmisor de señales y corriente (8), y en el que la brida de acoplamiento (10) está configurada, por el lado frontal (11) alejado de la brida adaptadora (4), de forma correspondiente a la brida de herramienta (2) del brazo de robot (1).
Tipo: Resumen de patente/invención.
Solicitante: STEMMANN-TECHNIK GMBH.
Nacionalidad solicitante: Alemania.
Dirección: QUENDORFER STRASSE 34,48465 SCHUTTORF.
Inventor/es: BARTHELT, KLAUS.
Fecha de Publicación: .
Fecha Concesión Europea: 25 de Mayo de 2005.
Clasificación Internacional de Patentes:
- B25J15/04 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 15/00 Cabezas de aprehensión. › con posibilidad para el levantamiento o el cambio a distancia de la cabeza o de partes de ésta.
- B25J19/00 B25J […] › Accesorios adaptados a los manipuladores, p. ej. para controlar, para observar; Dispositivos de seguridad combinados con los manipuladores o especialmente concebidos para ser utilizados en asociación con estos manipuladores (dispositivos de seguridad en general F16P; protección contra las radiaciones en general G21F).
- H01R39/64 ELECTRICIDAD. › H01 ELEMENTOS ELECTRICOS BASICOS. › H01R CONEXIONES CONDUCTORAS DE ELECTRICIDAD; ASOCIACION ESTRUCTURAL DE UNA PLURALIDAD DE ELEMENTOS DE CONEXION ELECTRICA AISLADOS UNOS DE OTROS; DISPOSITIVOS DE ACOPLAMIENTO; COLECTORES DE CORRIENTE. › H01R 39/00 Colectores de corriente rotativos, distribuidores o interruptores. › Dispositivos para la toma ininterrumpida de la corriente.
Patentes similares o relacionadas:
Aparatos y procedimientos para el accionamiento remoto de puntos de control, del 24 de Junio de 2020, de Stevenson, Robert L: Aparato para el accionamiento remoto de un punto de control , que comprende: un elemento alargado que tiene un primer extremo y un […]
Funda protectora de robot con una conexión rebordeada, del 10 de Junio de 2020, de Dürr Systems AG: Funda protectora de robot para un robot de revestimiento , en particular un robot de pintura , con a) un elemento de conexión […]
Adaptador de enchufe, instrumento de ajuste y robot asociado, del 22 de Abril de 2020, de KUKA Deutschland GmbH: Adaptador de enchufe, que presenta: - una rosca , que está configurada para atornillar el adaptador de enchufe a un instrumento de ajuste , - un dispositivo […]
Aparato y sistema de brazo articulado, del 8 de Abril de 2020, de VANRX Pharmasystems Inc: Aparato de brazo articulado multieje sellado herméticamente para su uso dentro de una cámara aisladora sellable, comprendiendo el aparato: […]
Sistema de traslación, del 8 de Abril de 2020, de SW Automation GmbH: Sistema de traslación para un dispositivo de manejo que cuente al menos con un elemento de guía y al menos con un cuerpo de carro que dicho […]
Pasador de cizallamiento para calibración de robots, del 1 de Abril de 2020, de ABB SCHWEIZ AG: Un pasador de cizallamiento para calibrar un robot industrial y configurado de modo que se monte en un soporte del pasador de calibración en el robot […]
Procedimiento para monitorizar una línea de suministro de un robot industrial y un dispositivo de control, del 25 de Marzo de 2020, de KUKA Deutschland GmbH: Procedimiento para monitorizar una línea de suministro de un robot industrial , que tiene una o más líneas guiadas en un conducto protector , para detectar […]
Sistema de carga eléctrica para un robot, del 18 de Marzo de 2020, de Locus Robotics Corp: Un sistema de carga eléctrica, que comprende: un conjunto de cargador eléctrico, incluyendo: una base del cargador a acoplarse a una fuente de energía eléctrica; […]