Sistema y método para codificación y decodificación aritmética.
Un sistema para la codificación y decodificación aritmética que comprende
•
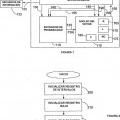
un codificador de entropía (1100) para convertir al menos una secuencia de eventos, en que cada secuencia de eventos incluye una pluralidad de eventos, a al menos una secuencia de información, en que cada secuencia de información incluye al menos una parte de información, en que la al menos una secuencia de eventos representa datos de entrada particionados en una serie de segmentos, que comprende:
• un codificador aritmético (1115) configurado para generar cero o más partes de información de al menos una secuencia de información codificando al menos un evento de al menos una secuencia de eventos; y
• un controlador (1120) acoplado con el codificador aritmético (1115) configurado para mantener una limitación del número de eventos de la secuencia de eventos con respecto al número de partes de información generadas incluyendo el número de eventos en la al menos una secuencia de eventos para ser igual o inferior que un número determinado por una función de una combinación lineal que incluye el número de partes de información generadas en la al menos una secuencia de información y el número de segmentos y
• un descodificador configurado para descodificar la al menos una secuencia de información.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E10195913.
Solicitante: NTT DOCOMO, INC..
Nacionalidad solicitante: Japón.
Dirección: 11-1, NAGATACHO 2-CHOME CHIYODA-KU, TOKYO 100-6150 JAPON.
Inventor/es: BOSSEN,FRANK JAN.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G06K9/46 FISICA. › G06 CALCULO; CONTEO. › G06K RECONOCIMIENTO DE DATOS; PRESENTACION DE DATOS; SOPORTES DE REGISTROS; MANIPULACION DE SOPORTES DE REGISTROS (impresión per se B41J). › G06K 9/00 Métodos o disposiciones para la lectura o el reconocimiento de caracteres impresos o escritos o el reconocimiento de formas, p. ej. de huellas dactilares (métodos y disposiciones para la lectura de grafos o para la conversión de patrones de parámetros mecánicos, p.e. la fuerza o la presencia, en señales eléctricas G06K 11/00; reconocimiento de la voz G10L 15/00). › Extracción de elementos o de características de la imagen.
- H03M7/40 ELECTRICIDAD. › H03 CIRCUITOS ELECTRONICOS BASICOS. › H03M CODIFICACION, DECODIFICACION O CONVERSION DE CODIGO, EN GENERAL (por medio de fluidos F15C 4/00; convertidores ópticos analógico/digitales G02F 7/00; codificación, decodificación o conversión de código especialmente adaptada a aplicaciones particulares, ver las subclases apropiadas, p. ej. G01D, G01R, G06F, G06T, G09G, G10L, G11B, G11C, H04B, H04L, H04M, H04N; cifrado o descifrado para la criptografía o para otros fines que implican la necesidad de secreto G09C). › H03M 7/00 Conversión de un código, en el cual la información está representada por una secuencia dada o por un número de dígitos, en un código en el cual la misma información está representada por una secuencia o por un número de dígitos diferentes. › Conversión en, o a partir de códigos la longitud variable, p. ej. código Shanno-Fano, código Huffman, código Morse.
PDF original: ES-2552696_T3.pdf


Patentes similares o relacionadas:
Codificación de las posiciones de los picos espectrales, del 27 de Mayo de 2020, de TELEFONAKTIEBOLAGET LM ERICSSON (PUBL): Un método de codificación de las posiciones de los picos espectrales de un segmento de una señal de audio, comprendiendo el método: - determinar cuál […]
Sistema y método para codificación y decodificación aritmética, del 29 de Abril de 2020, de NTT DOCOMO, INC.: Método de decodificación aritmética para convertir una secuencia de información compuesta por una secuencia de bits en una secuencia de eventos binarios compuesta […]
Procedimiento de codificación de imagen, procedimiento de decodificación de imagen, dispositivo de codificación de imagen, dispositivo de decodificación de imagen y dispositivo de codificación/decodificación de imagen, del 4 de Marzo de 2020, de Sun Patent Trust: Un procedimiento de codificación de imagen para codificar datos de imagen por compresión que incluye una pluralidad de unidades de procesamiento que tienen diferentes tamaños […]
Aparato de decodificación de vídeo que usa actualización de parámetros para la desbinarización del coeficiente de transformación codificado por entropía, y procedimiento de codificación que usa el mismo para la binarización, del 26 de Febrero de 2020, de SAMSUNG ELECTRONICS CO., LTD.: Un aparato de decodificación de vídeo, comprendiendo el aparato: un analizador que obtiene una cadena binaria correspondiente a un elemento […]
Transformación solapada condicional, del 20 de Noviembre de 2019, de Microsoft Technology Licensing, LLC: Un método para codificar un flujo de bits de vídeo utilizando una transformación solapada condicional, en donde el método comprende: la señalización de un modo de filtro […]
Esquema de codificación y decodificación entrópica, del 4 de Septiembre de 2019, de GE Video Compression, LLC: Aparato de codificación entrópica que comprende un descomponedor configurado para convertir una secuencia de elementos de […]
Procedimiento, aparato y sistema para codificar y descodificar un subconjunto de unidades de transformación de datos de vídeo codificados, del 4 de Septiembre de 2019, de CANON KABUSHIKI KAISHA: Procedimiento de descodificación de una unidad de transformación de datos de vídeo codificados utilizando la descodificación de Golomb-Rice, siendo la unidad de […]
Procedimiento de codificación de longitud variable y procedimiento de decodificación de longitud variable, del 14 de Agosto de 2019, de Godo Kaisha IP Bridge 1: Un método de codificación para codificar un coeficiente de un componente de frecuencia incluido en un bloque objetivo a codificar, comprendiendo el método de codificación: […]