Cobertura multimodo para un robot autónomo.
Un robot móvil (10), que comprende:
(a) medios para mover el robot (10) sobre una superficie;
(b) un sensor de detección de obstáculos (12, 13);
(c) y un sistema de control conectado de manera operativa a dicho sensor de detección de obstáculos (12, 13) y a dichos medios de movimiento;
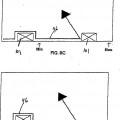
(d) estando configurado dicho sistema de control para hacer funcionar el robot (10) en una pluralidad de modos, comprendiendo dicha pluralidad de modos: un modo de seguimiento de obstáculo mediante el cual dicho robot (10) se desplaza de manera adyacente a un obstáculo, y un modo de rebote mediante el cual el robot (10) se desplaza sustancialmente en una dirección alejándose de un obstáculo después de encontrarse un obstáculo,
caracterizado por que el robot móvil (10) comprende además
sensores de desnivel (14) que impiden que el robot móvil (10) se caiga por unas escaleras u otras caídas verticales, un sensor de descenso de rueda que puede detectar si una o más ruedas no están apoyadas en la superficie.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E10183299.
Solicitante: IROBOT CORPORATION.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 8 CROSBY DRIVE BEDFORD, MA 01730 ESTADOS UNIDOS DE AMERICA.
Inventor/es: JONES,Joseph, MASS,Philip,R.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B08B13/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B08 LIMPIEZA. › B08B LIMPIEZA EN GENERAL; PREVENCION DE LA SUCIEDAD EN GENERAL (cepillos A46; dispositivos para limpieza del hogar o análogos A47L; separación de partículas sólidas de líquidos o gases B01D; separación de sólidos B03, B07; pulverización o aplicación de líquidos u otros materiales fluidos sobre superficies en general B05; dispositivos de limpieza para transportadores B65G 45/10; operaciones combinadas de lavado, llenado y cierre de botellas B67C 7/00; inhibición de la corrosión o de la incrustación en general C23; limpieza de calles, de vías férreas, de playas o de terrenos E01H; partes constitutivas, detalles o accesorios de piscinas para nadar o para chapotear especialmente adaptados a la limpieza E04H 4/16; protección contra las cargas electrostáticas o supresión de estas cargas H05F). › Accesorios o partes constitutivas, de utilización general, de máquinas o aparatos de limpieza.
- B25J13/00 B […] › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › Controles para manipuladores (controles por programa B25J 9/16).
- B25J5/00 B25J […] › Manipuladores montados sobre ruedas o sobre soportes móviles (B25J 1/00 tiene prioridad; manipuladores de control programado B25J 9/00).
- G05D1/02 FISICA. › G05 CONTROL; REGULACION. › G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F). › G05D 1/00 Control de la posición, del rumbo, de la altitud o de la actitud de vehículos terrestres, acuáticos, aéreos o espaciales, p. ej. piloto automático (sistemas de radionavegación o sistemas análogos que utilizan otras ondas G01S). › Control de la posición o del rumbo por referencia a un sistema de dos dimensiones.
PDF original: ES-2520391_T3.pdf
Fragmento de la descripción:
Cobertura multimodo para un robot autónomo Campo de la invención
Esta invención se refiere en general a vehículos o robots autónomos y, más específicamente, a procedimientos y a dispositivos robóticos móviles para cubrir un área específica que puedan requerirse por, o usarse como, limpiadores robóticos o cortadoras de césped.
Antecedentes
Para los fines de esta descripción, los ejemplos se centrarán en los problemas a los que se ha enfrentado la técnica anterior en lo que respecta a una limpieza robótica (por ejemplo, quitar el polvo, dar brillo, barrer, fregar el suelo, limpiar en seco o pasar la aspiradora). Sin embargo, la invención reivindicada sólo está limitada por las reivindicaciones, y un experto en la técnica reconocerá los múltiples usos de la presente invención más allá de una limpieza doméstica en entornos cerrados.
Los ingenieros robóticos han trabajado durante mucho tiempo en el desarrollo de un procedimiento eficaz de limpieza autónoma. A modo de introducción, el rendimiento de los robots de limpieza debe centrarse en tres medidas prácticas: cobertura, tasa de limpieza y efectividad percibida. La cobertura es el porcentaje del espacio disponible recorrido por el robot durante un tiempo de limpieza establecido y, de manera ideal, un robot de limpieza proporciona una cobertura del 100 por cien dado un tiempo de funcionamiento infinito. Desafortunadamente, los diseños de la técnica anterior dejan sin cubrir frecuentemente algunas zonas, independientemente de la cantidad de tiempo que se deje al dispositivo para completar sus tareas. La imposibilidad de conseguir una cobertura completa puede deberse a limitaciones mecánicas, por ejemplo el tamaño y la forma del robot pueden impedir que llegue a determinadas zonas, o el robot puede quedar atrapado sin poder modificar su control para liberarse. La imposibilidad de conseguir una cobertura completa también puede deberse a un algoritmo de cobertura inadecuado. El algoritmo de cobertura es el conjunto de instrucciones usado por el robot para controlar su movimiento. Para los fines de la presente Invención, la cobertura se trata como un porcentaje del área disponible recorrida por el robot durante un tiempo de limpieza finito. Debido a limitaciones mecánicas y/o algorítmicas, determinadas zonas del espacio disponible pueden omitirse sistemáticamente. Tal omisión sistemática es una limitación importante de la técnica anterior.
Una segunda medida del rendimiento de un robot de limpieza es la tasa de limpieza dada en unidades de área limpiada por unidad de tiempo. La tasa de limpieza se refiere a la tasa en que aumenta el área de suelo que se ha limpiado; la tasa de cobertura se refiere a la tasa en que el robot cubre el suelo independientemente de si el suelo estaba previamente limpio o sucio. Si la velocidad del robot es v y el ancho del mecanismo de limpieza del robot (también denominado ancho de trabajo) es w, entonces la tasa de cobertura del robot es simplemente wv, pero su tasa de limpieza puede ser drásticamente inferior.
Un robot que se mueve de una manera puramente aleatoria en un entorno cerrado tiene una tasa de limpieza que disminuye con respecto a la tasa de cobertura del robot como una función de tiempo. Esto se debe a que cuanto más tiempo funcione el robot, mayor será la probabilidad devuelva a pasar por zonas ya limpiadas. El diseño óptimo tiene una tasa de limpieza equivalente a la tasa de cobertura, minimizando de este modo limpiezas repetidas innecesarias en el mismo punto. Dicho de otro modo, la relación de la tasa de limpieza con respecto a la tasa de cobertura es una medida de eficacia y una tasa de limpieza óptima indicará la cobertura del mayor porcentaje del área designada con el mínimo número de pasadas acumulativas o redundantes sobre un área ya limpiada.
Una tercera medida del rendimiento del robot de limpieza es la efectividad percibida del robot. Esta medida se ha ignorado en la técnica anterior. Un movimiento deliberado y un determinado movimiento que se ajusta a un patrón es favorable ya que los usuarios percibirán un robot con un movimiento deliberado más eficaz.
Aunque la tasa de cobertura, la tasa de limpieza y la efectividad percibida son los criterios de rendimiento analizados en este documento, una realización preferida de la presente invención también tiene en cuenta la facilidad de utilización en habitaciones de diferentes formas y tamaños (que contengan una serie de obstáculos no conocidos) y el coste de los componentes robóticos. Otros criterios de diseño también pueden influir en el diseño, por ejemplo la necesidad de evitar colisiones y una respuesta apropiada a otros peligros.
Tal y como se describe en detalle en el documento Mobile Robots: Inspiration to Implementatlon, de Jones, Flynn y Seiger, segunda edición, 1999, A K Peters, Ltd., y en otros documentos, se han llevado a cabo numerosos Intentos para fabricar robots de aspirado y limpieza y. Cada uno de estos robots ha afrontado un reto similar: cómo cubrir de manera eficaz el área designada dadas unas reservas de energía limitadas.
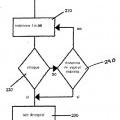
En este documento, se hace referencia a una limpieza totalmente eficaz, donde la tasa de limpieza es Igual a la tasa de cobertura, como. Tal y como se muestra en la flg. 1A, un robot 1 que sigue una trayectoria determinista se
desplaza de tal manera que cubre completamente el área 2 evitando al mismo tiempo toda limpieza redundante. Una limpieza determinista requiere que el robot sepa dónde está y dónde ha estado; esto requiere a su vez un sistema de posicionamiento. Tal sistema de posicionamiento, un sistema de posicionamiento adecuadamente preciso como para permitir que la limpieza determinista se base en sistemas de exploración láser, transductores ultrasónicos, GPS diferencial de fase de portadora, u otros procedimientos, puede ser extremadamente caro y requerir una configuración por parte del usuario específica con respecto a la geometría particular de la habitación. Además, los procedimientos que se basan en el posicionamiento global se ven afectados normalmente por los fallos en cualquier parte del sistema de posicionamiento.
Un ejemplo de utilización de tecnologías de detección altamente sofisticadas (y caras) para producir una limpieza determinista es el dispositivo RoboScrub fabricado por Denning Mobile Robotics y Windsor Industries que usa sensores con sonar, sensores infrarrojos, sensores de choque y navegación láser de alta precisión. El sistema de navegación del dispositivo RoboScrub requería colocar grandes blancos con códigos de barras en diferentes ubicaciones de la habitación. El requisito de que el dispositivo RoboScrub tenga que descubrir al menos cuatro blancos simultáneamente fue un problema de funcionamiento importante. Por lo tanto, el dispositivo RoboScrub está limitado a limpiar grandes espacios abiertos.
Otro ejemplo, RoboKent, un robot fabricado por la Kent Corporation, sigue una estrategia de posicionamiento global similar al RobotScrub. RoboKent prescinde del sistema de posicionamiento láser más caro de RobotScrub, pero con ello RoboKent debe limitarse solamente a áreas con una geometría rectangular simple, por ejemplo, largos pasillos. En estas regiones más constreñidas, basta la corrección de posición por mediciones de exploración del sonar. Otros sistemas de limpieza determinista se describen, por ejemplo, en las patentes de Estados Unidos números 4.119.900 (Kremnitz), 4.700.427 (Knepper), 5.353.224 (Lee et ál.), 5.537.017 (Feiten et ál.), 5.548.511 (Bancroft) y 5.650.702 (Azumi). El documento DE19849978 es otro ejemplo de un robot de limpieza.
Debido a las limitaciones y dificultades de la limpieza determinista, algunos robots se han basado en esquemas seudodeterministas. Un procedimiento que proporciona una limpieza seudodeterminista es un procedimiento de navegación autónoma conocido como situación por estima. La situación por estima consiste en medir la rotación precisa de cada rueda propulsora del robot (utilizando por ejemplo codificadores de eje ópticos). De este modo, el robot puede calcular su posición esperada en el entorno dado un punto de partida conocido y la orientación. Un problema de esta técnica es el resbalamiento de las ruedas. Si se produce un resbalamiento, el codificador de esa rueda registra una rotación de rueda incluso aunque la rueda no esté impulsando al robot con respecto al suelo. Tal y como se muestra en la fig. 1B, a medida que el robot 1 se traslada por la habitación, los errores de resbalamiento de las ruedas propulsoras se acumulan, lo que hace que este tipo de sistema no sea fiable para recorridos de cualquier duración sustancial. (La trayectoria ya no consiste en filas muy próximas entre sí, en comparación con la cobertura determinista mostrada... [Seguir leyendo]
Reivindicaciones:
I.- Un robot móvil (10), que comprende:
(a) medios para mover el robot (10) sobre una superficie;
(b) un sensor de detección de obstáculos (12, 13);
(c) y un sistema de control conectado de manera operativa a dicho sensor de detección de obstáculos (12, 13) y a dichos medios de movimiento;
(d) estando configurado dicho sistema de control para hacer funcionar el robot (10) en una pluralidad de modos, comprendiendo dicha pluralidad de modos: un modo de seguimiento de obstáculo mediante el cual dicho robot (10) se desplaza de manera adyacente a un obstáculo, y un modo de rebote mediante el cual el robot (10) se desplaza sustancialmente en una dirección alejándose de un obstáculo después de encontrarse un obstáculo, caracterizado por que el robot móvil (10) comprende además
sensores de desnivel (14) que impiden que el robot móvil (10) se caiga por unas escaleras u otras caídas verticales, un sensor de descenso de rueda que puede detectar si una o más ruedas no están apoyadas en la superficie.
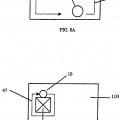
2 - Un robot móvil (10) según la reivindicación 1, mediante el cual dicho sistema de control está configurado para alternar en dicho modo de seguimiento de obstáculo después de un número predeterminado de interacciones de sensor.
3 - Un robot móvil (10) según la reivindicación 2, en el que dicho número predeterminado de interacciones de sensor se determina de forma aleatoria.
4.- Un robot móvil (10) según la reivindicación 2, en el que dicho número predeterminado de interacciones de sensor está entre aproximadamente 5 y aproximadamente 15.
5.- Un robot móvil (10) según cualquiera de las reivindicaciones 1 a 4, en el que dicho sistema de control está configurado para alternar en dicho modo de rebote después de que el robot (10) se desplace una distancia predeterminada en dicho modo de seguimiento de obstáculo.
6 - Un robot móvil (10) según cualquiera de las reivindicaciones 1 a 4, en el que dicho sistema de control está configurado para alternar en dicho modo de rebote cuando bien el robot (10) se ha desplazado una distancia máxima o el robot (10) se ha desplazado una distancia mínima y se haya encontrado un obstáculo.
7 - Un robot móvil (10) según la reivindicación 6, en el que dicha distancia mínima es al menos 115 cm.
8 - Un robot móvil (10) según la reivindicación 7, en el que dicha distancia máxima es menor que 520 cm.
9.- Un robot móvil (10) según cualquiera de las reivindicaciones 1 a 8, en el que el sistema de control alterna modos de funcionamiento basados en la distancia que se ha desplazado dicho robot (10).
10.- Un robot móvil (10) según cualquiera de las reivindicaciones 1 a 9, que comprende además un medio para determinar el nivel de desorden.
II.- Un robot móvil (10) según la reivindicación 10, en el que dicho medio para determinar el nivel de desorden comprende localizar el número de interacciones con obstáculos a lo largo del tiempo.
12.- Un robot móvil (10) según cualquiera de las reivindicaciones 1 a 11, en el que el sistema de control alterna entre modos de funcionamiento en función de una ausencia de entrada de sensor.
13.- Un robot móvil (10) según cualquiera de las reivindicaciones 1 a 12, en el que el robot móvil (10) usa un sensor de seguimiento de obstáculo en el modo de seguimiento de obstáculo para posicionarse en una distancia establecida con respecto a un obstáculo.
14.- Un robot móvil (10) según cualquiera de las reivindicaciones 1 a 11, mediante el cual dicho sistema de control está configurado para reducir la velocidad del robot cuando se detecta un desnivel.
15.- Un robot móvil (10) según cualquiera de las reivindicaciones 1 a 14, mediante el cual dicho robot (10) usa la tasa de eventos de sensor de descenso de rueda como entrada para dicho sistema de control.
Patentes similares o relacionadas:
Sensores de pista para detectar la posición del vehículo con respecto a las pistas, del 15 de Julio de 2020, de Autostore Technology AS: Un método para rastrear la posición de un vehículo operado remotamente siguiendo una ruta establecida en relación con las pistas establecidas en una estructura de marco que forma […]
Un aparato, método y programa informático para habilitar la carga de un vehículo, del 15 de Julio de 2020, de Nokia Technologies OY: Un método que comprende: obtener información de un vehículo alimentado por energía solar, en el que la información comprende al […]
Procedimiento de funcionamiento de un aparato de limpieza dotado de movilidad automática, del 1 de Julio de 2020, de VORWERK & CO. INTERHOLDING GMBH: Procedimiento de funcionamiento de un aparato de limpieza dotado de movilidad automática dentro de un entorno, en el que el aparato de limpieza limpia una superficie […]
Robot móvil autónomo para ejecutar asignaciones de trabajo en un entorno físico en el que hay obstáculos estacionarios y no estacionarios, del 1 de Julio de 2020, de OMRON CORPORATION: Un robot móvil para ejecutar una asignación de trabajo en un entorno físico en el que hay obstáculos estacionarios y no estacionarios, comprendiendo […]
Procedimiento para el control de una unidad de luz de una iluminación exterior de automóvil, automóvil, dispositivo externo al vehículo y sistema, del 17 de Junio de 2020, de AUDI AG: Procedimiento para el control de al menos una unidad de luz de una iluminación exterior de automóvil de un primer automóvil (10a, 10b, 10c) en una columna de vehículos […]
Método, sistema y dispositivo de control de emergencia para gestión de tráfico de vehículos autónomos en situaciones de emergencia, del 17 de Junio de 2020, de THE BOEING COMPANY: Método para gestión de tráfico de vehículos autónomos en situaciones de emergencia, que comprende: tras la recepción , por un vehículo […]
Procedimiento de limpieza temporizada, dispositivo y medio de almacenamiento, del 17 de Junio de 2020, de Beijing Xiaomi Mobile Software Co., Ltd: Un procedimiento de limpieza temporizada que comprende: obtener un mapa topográfico de una región de limpieza, en el que el mapa […]
Conjunto compuesto por un sistema de alimentación en tierra y un vehículo eléctrico, del 17 de Junio de 2020, de ALSTOM Transport Technologies: Conjunto formado por un sistema de alimentación en tierra y un vehículo eléctrico , el sistema de alimentación en tierra es del […]