Cintas transportadoras que tienen rodillos que desplazan objetos.
Cinta (12, 102, 172) transportadora que comprende:
múltiples conjuntos de rodillos a través de la anchura de la cinta,
incluyendo cada 5 conjunto de rodillos un primer rodillo (26, 116, 176, 210, 240) y un segundo rodillo (28, 118, 178, 212, 242), estando situados los rodillos primero y segundo en contacto entre sí de manera que accionar uno de los rodillos en un primer sentido angular provoca la rotación del otro rodillo en un segundo sentido angular opuesto, caracterizada porque el primer rodillo se extiende por debajo de una superficie inferior de la cinta y el segundo 10 rodillo se extiende por encima de una superficie superior de la cinta.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2008/056017.
Solicitante: LAITRAM L.L.C..
Inventor/es: FOURNEY,MATTHEW,L.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B65G17/24 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › B65G 17/00 Transportadores que tienen un elemento de tracción sin fin, p.ej. una cadena que transmite el movimiento a una superficie portante de cargas continua o sensiblemente continua, o a una serie de portacargas individuales; Transportadores de cadenas sin fin en los que las cadenas constituyen la superficie que lleva la carga. › que tienen una serie de rodillos que desplaza el elemento de tracción sobre una superficie portante para efectuar el transporte de cargas o de portacargas.
- B65G47/46 B65G […] › B65G 47/00 Dispositivos para manipular objetos o materiales asociados con los transportadores; Métodos de empleo de los dispositivos. › con distribución, p. ej. automáticamente en los puntos deseados (en los sistemas de correo por tubos B65G 51/36).
PDF original: ES-2535022_T3.pdf
Fragmento de la descripción:
Cintas transportadoras que tienen rodillos que desplazan objetos
Antecedentes
Las cintas transportadoras a veces incluyen rodillos que se usan para desviar objetos de la cinta en una dirección lateral elegida. En algunos sistemas, los rodillos están colocados de manera que sus ejes de rotación se alinean con un sentido de desplazamiento de la cinta de manera que los rodillos pueden rotar en una dirección transversal. Una cinta transportadora de este tipo se describe en el documento US 25/19582. En otros sistemas, los rodillos están colocados en ángulo en relación con el sentido de desplazamiento de la cinta. En cualquier caso, sin embargo, los ángulos con los que los objetos pueden desviarse del transportador son limitados.
Según un primer aspecto de la invención, se proporciona una cinta transportadora como se indica en la reivindicación 1 y un método como se indica en las reivindicaciones 15 y 16.
Breve descripción de los dibujos
Las cintas transportadoras dadas a conocer pueden entenderse con referencia a los siguientes dibujos. Los componentes en los dibujos no están necesariamente a escala.
La figura 1 es una vista en perspectiva desde arriba de una primera realización de una parte de un transportador.
La figura 2 es una vista desde arriba de una realización de un módulo de cinta transportadora usado en el transportador de la figura 1.
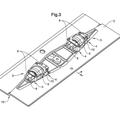
La figura 3 es una vista lateral del módulo de cinta transportadora de la figura 2.
La figura 4 es una vista esquemática desde un extremo del transportador de la figura 1, que ilustra la desviación de un objeto transportado por el transportador.
La figura 5 es una vista en perspectiva desde arriba del transportador de la figura 1, que ilustra adicionalmente la desviación del objeto por el transportador.
Las figuras 6A-6D son vistas esquemáticas que ilustran secuencialmente la desviación de un objeto que usa el transportador de la figura 1.
La figura 7 es una vista en perspectiva desde arriba de una segunda realización de una parte de un transportador.
La figura 8 es una vista desde arriba de una realización de un módulo de cinta transportadora usado en el transportador de la figura 7.
La figura 9 es una vista lateral del módulo de cinta transportadora de la figura 8.
La figura 1 es una vista lateral del transportador de la figura 7, que ilustra el desplazamiento de un objeto transportado por el transportador.
La figura 11 es una vista en perspectiva desde arriba del transportador de la figura 7, que ilustra adicionalmente el desplazamiento del objeto por el transportador.
Las figuras 12A-12C son vistas laterales esquemáticas de una realización de una parte de un tercer transportador, ilustrando secuencialmente las vistas el control de una posición de un objeto a lo largo de la longitud de una cinta transportadora.
La figura 13 es una vista lateral de una primera realización alternativa de rodillos que pueden usarse en una cinta transportadora.
La figura 14 es una vista desde un extremo de los rodillos de la figura 13.
La figura 15 es una vista lateral de una segunda realización alternativa de rodillos que pueden usarse en una cinta transportadora.
Descripción detallada
A continuación se describen cintas transportadoras que tienen rodillos que pueden usarse para desplazar objetos transportados por las cintas. En las realizaciones, una cinta transportadora comprende conjuntos de rodillos que incluyen rodillos superior e inferior, extendiéndose el rodillo inferior por debajo de una superficie inferior de la cinta y extendiéndose el rodillo superior por encima de una superficie superior de la cinta. Los rodillos superior e inferior entran en contacto entre sí de manera que cuando el rodillo inferior se acciona en un primer sentido angular, el rodillo superior rota en un segundo sentido angular opuesto. En los casos en que los rodillos rotan en una dirección que forma un ángulo con una dirección longitudinal de la cinta, los rodillos superiores pueden usarse para desplazar objetos en una dirección transversal y hacia atrás de manera que pueden desviarse objetos con ángulos de desviación relativamente altos. En los casos en que los rodillos rotan en una dirección paralela a la dirección longitudinal de la cinta, pueden desplazarse objetos sobre la cinta en un sentido opuesto al sentido de desplazamiento de la cinta.
A continuación, se dan a conocer diversas realizaciones de cintas transportadoras. Aunque se presentan realizaciones específicas, esas realizaciones son meras implementaciones de ejemplo de las cintas dadas a conocer y ha de observarse que son posibles otras realizaciones. Se pretende que todas esas realizaciones entren dentro del alcance de esta divulgación.
Haciendo referencia a las figuras, en las que números similares indican partes correspondientes a lo largo de las diversas vistas, la figura 1 ilustra una realización de un transportador 1 que puede usarse para desviar objetos. Como se indica en la figura 1, el transportador 1 comprende una cinta 12 transportadora y un mecanismo 14 de accionamiento con el que puede interaccionar la cinta. En la realización de la figura 1, la cinta 12 transportadora comprende una pluralidad de módulos 16 de cinta transportadora que se enlazan entre sí para formar la cinta. Los módulos 16 están alineados en filas 18 transversales que se extienden a través de la anchura de la cinta 12, y en columnas 2 longitudinales que se extienden a lo largo de una dirección longitudinal de la cinta, que coincide con el sentido de desplazamiento de la cinta indicado por la flecha 22. A modo de ejemplo, los módulos 16 están conectados de manera pivotante a módulos adyacentes a lo largo de la dirección longitudinal de la cinta 12 con árboles 24 transversales. Los módulos 16 incluyen conjuntos de rodillos que comprenden un primer rodillo 26 o rodillo 26 inferior y un segundo rodillo 28 o rodillo 28 superior que están dispuestos en una orientación apilada verticalmente dentro de un espacio 3 interno de los módulos.
El mecanismo 14 de accionamiento se usa para accionar los rodillos 26, 28 inferiores y superiores de los módulos 16 de cinta transportadora. Como se indica en la figura 1, el mecanismo 14 de accionamiento puede comprender múltiples rodillos 32 longitudinales que tienen ejes de rotación que son paralelos a la dirección longitudinal de la cinta 12 transportadora y que están alineados con las columnas 2 de los módulos 16 de cinta
transportadora de manera que está previsto un rodillo longitudinal para cada columna de cinta. Como se describe en mayor detalle a continuación, cuando los rodillos 32 longitudinales se sitúan en contacto con los rodillos 26 inferiores mientras que la cinta 12 está moviéndose, fuerzas de rozamiento entre los rodillos longitudinales y los rodillos inferiores provocan que los rodillos inferiores roten, lo que da como resultado la rotación opuesta de los rodillos 28 superiores. En al menos algunas realizaciones, los rodillos 32 longitudinales tienen superficies externas de alto rozamiento que reducen el deslizamiento entre los rodillos 32 longitudinales y los rodillos 26 inferiores. En realizaciones alternativas, el mecanismo de accionamiento puede comprender una placa de rozamiento que se usa para rotar los rodillos 26 inferiores. Un ejemplo de una placa de rozamiento de este tipo se ilustra en la figura 7.
Las figuras 2 y 3 ilustran una realización de ejemplo para el módulo 16 de cinta transportadora. Como se indica en esas figuras, el módulo 16 comprende un cuerpo 4 que tiene un extremo 42 frontal, un extremo 44 trasero y caras 46 laterales opuestas. Además, el cuerpo 4 incluye una superficie 48 superior y una superficie 5 inferior. Aunque se ha usado terminología espacial particular tal como "frontal" y "trasero", esos términos se usan en el presente documento para describir el módulo 16 en su orientación mostrada en la figura 1. Por tanto, los términos espaciales no son absolutos y no deben interpretarse como tales.
En algunas realizaciones, el cuerpo 4 de módulo está construido de manera unitaria a partir de una única pieza de material, tal como un material polimérico. En otras realizaciones, el cuerpo 4 comprende piezas separadas, por ejemplo mitades separadas, que se conectan entre sí para formar un cuerpo integrado. En tales realizaciones, el cuerpo 4 puede estar formado a partir de un material polimérico y/o de metal.
Como se muestra lo más claramente en la figura 2, el módulo 16 de cinta transportadora incluye además partes de conexión que se extienden desde el cuerpo 4. En la realización de las figuras 2 y 3, el módulo 16 comprende una única parte 52 de conexión que se extiende desde el extremo... [Seguir leyendo]
Reivindicaciones:
1. Cinta (12, 12, 172) transportadora que comprende:
múltiples conjuntos de rodillos a través de la anchura de la cinta, incluyendo cada
conjunto de rodillos un primer rodillo (26, 116, 176, 21, 24) y un segundo rodillo (28, 118, 178, 212, 242), estando situados los rodillos primero y segundo en contacto entre sí de manera que accionar uno de los rodillos en un primer sentido angular provoca la rotación del otro rodillo en un segundo sentido angular opuesto, caracterizada porque el
primer rodillo se extiende por debajo de una superficie inferior de la cinta y el segundo
rodillo se extiende por encima de una superficie superior de la cinta.
2. Cinta transportadora según la reivindicación 1, en la que los rodillos primero y segundo están dispuestos en una orientación apilada verticalmente en la que el primer rodillo (26,
116, 176, 21, 24) es un rodillo inferior y el segundo rodillo (28, 118, 178, 212, 242) es
un rodillo superior que está colocado encima del rodillo inferior.
3. Cinta transportadora según la reivindicación 1 ó 2, en la que los rodillos primero y segundo tienen ejes de rotación que son sustancialmente perpendiculares a una
dirección longitudinal de la cinta transportadora.
4. Cinta transportadora según la reivindicación 1 ó 2, en la que los rodillos primero y segundo tienen ejes de rotación que están dispuestos en ángulo en relación con una dirección longitudinal de la cinta transportadora.
5. Cinta transportadora según una cualquiera de las reivindicaciones anteriores, que comprende además módulos (16, 16) de cinta transportadora que soportan los conjuntos de rodillos.
6. Cinta transportadora según la reivindicación 5, en la que los módulos (16, 16) de cinta
transportadora incluyen un espacio (3, 12) interno en el que se coloca el conjunto de rodillos.
7. Cinta transportadora según la reivindicación 5, en la que los módulos (16, 16) de cinta
transportadora comprenden superficies (48, 13; 5, 132) superior e inferior y en la que
una parte del primer rodillo se extiende más allá de la superficie inferior y una parte del segundo rodillo se extiende más allá de la superficie superior.
8. Cinta transportadora según una cualquiera de las reivindicaciones anteriores, en la que
al menos algunos de los rodillos primero y segundo están configurados de modo que
crean un efecto de engranaje de manera que una superficie externa de uno de los rodillos se desplaza a una velocidad más rápida que una superficie externa del otro rodillo en un segundo sentido angular opuesto.
9. Cinta transportadora según una cualquiera de las reivindicaciones anteriores que
comprende:
una pluralidad de módulos (16, 16) de cinta transportadora que están dispuestos en filas a través de la anchura de la cinta transportadora y en columnas a lo largo de una
dirección longitudinal de la cinta y que forman al menos una parte de la cinta
transportadora, comprendiendo cada módulo un cuerpo (4, 122) que incluye una superficie (48, 13) superior, una superficie (5, 132) inferior y una abertura (3, 12) interna que se extiende desde la superficie superior hasta la superficie inferior, comprendiendo además cada módulo un conjunto de rodillos que incluye un rodillo
superior y un rodillo inferior colocados dentro de la abertura en una orientación apilada verticalmente, en la que los rodillos superior e inferior están situados en contacto entre sí con el rodillo superior colocado por encima del rodillo inferior, en la que una parte de cada rodillo superior se extiende más allá de la superficie superior de su cuerpo de 5 módulo asociado y una parte de cada rodillo inferior se extiende más allá de la
superficie inferior de su cuerpo de módulo asociado;
en la que los rodillos inferiores pueden accionarse durante el funcionamiento de la cinta transportadora a través del contacto con un mecanismo de accionamiento dispuesto por
debajo de la cinta transportadora, provocando el contacto entre los rodillos inferiores y
el mecanismo de accionamiento que los rodillos inferiores roten en un sentido aguas abajo y provocando el contacto entre los rodillos inferiores y los rodillos superiores que los rodillos superiores roten en un sentido aguas arriba.
1. Cinta transportadora según la reivindicación 9, en la que cada rodillo está soportado
dentro de su módulo de cinta transportadora sobre un árbol de rodillo y cada árbol de rodillo es sustancialmente perpendicular a una dirección longitudinal de la cinta transportadora de manera que los rodillos rotan en direcciones alineadas con la dirección longitudinal de la cinta transportadora.
11. Cinta transportadora según la reivindicación 9, en la que cada rodillo está soportado dentro de su módulo de cinta transportadora sobre un árbol de rodillo y cada árbol de rodillo está dispuesto en ángulo en relación con una dirección longitudinal de la cinta transportadora.
12. Cinta transportadora según la reivindicación 9, en la que al menos algunos de los rodillos superiores comprenden una primera parte en contacto con un rodillo inferior y una segunda parte adaptada para entrar en contacto con objetos portados por la cinta transportadora, teniendo la primera parte un diámetro más pequeño que la segunda
parte.
13. Cinta transportadora según una cualquiera de las reivindicaciones anteriores, en la que los rodillos superior e inferior tienen dientes (254) que están adaptados para engranar entre sí para reducir el deslizamiento de rodillo.
14. Cinta transportadora según una cualquiera de las reivindicaciones anteriores, en la que la cinta se construye a partir de un material polimérico.
15. Método para desviar objetos de una cinta transportadora según cualquiera de las
reivindicaciones anteriores, comprendiendo el método:
desplazar transversalmente un objeto de la cinta transportadora usando una pluralidad de rodillos superiores previstos en la cinta que se extienden más allá de una superficie superior de la cinta, accionándose los rodillos superiores mediante rodillos inferiores
colocados por debajo de los rodillos superiores dentro de la cinta, extendiéndose los
rodillos inferiores más allá de una superficie inferior de la cinta y accionándose mediante un mecanismo de accionamiento ubicado por debajo de la cinta.
16. Método para desplazar objetos sobre una cinta transportadora según cualquiera de las
reivindicaciones 1 a 14, comprendiendo el método:
desplazar un objeto en un sentido aguas arriba en relación con la cinta transportadora de modo que al menos se reduce la velocidad con la que se transporta el objeto en un sentido aguas abajo por la cinta, en el que desplazar el objeto comprende impulsar el
objeto en el sentido aguas arriba usando una pluralidad de rodillos superiores que se extienden más allá de una superficie superior de la cinta, accionándose los rodillos superiores mediante rodillos inferiores colocados por debajo de los rodillos superiores dentro de la cinta, extendiéndose los rodillos inferiores más allá de una superficie 5 inferior de la cinta y accionándose mediante un mecanismo de accionamiento ubicado
por debajo de la cinta.
Patentes similares o relacionadas:
Unidad de transporte discreto, para arándanos y productos de fruta o vegetales similares, del 26 de Febrero de 2020, de UNITEC S.P.A: Unidad de transporte discreto , para arándanos (A) y productos de fruta o vegetales similares, que puede instalarse en serie a lo largo […]
Sistemas transportadores para desviar objetos, del 19 de Febrero de 2020, de LAITRAM L.L.C.: Un sistema transportador que comprende: una cinta transportadora que incorpora una pluralidad de rodillos de cinta transportadora configurados […]
 Elemento transportador con mecanismo de rodillos, del 31 de Octubre de 2019, de WRH WALTER REIST HOLDING AG: Elemento transportador con medios de ajuste , donde el elemento transportador está diseñado para un transportador , en particular para un transportador […]
Elemento transportador con mecanismo de rodillos, del 31 de Octubre de 2019, de WRH WALTER REIST HOLDING AG: Elemento transportador con medios de ajuste , donde el elemento transportador está diseñado para un transportador , en particular para un transportador […]
Transportador que tiene rodillos accionados por inducción electromagnética, del 14 de Agosto de 2019, de LAITRAM L.L.C.: Un transportador que comprende: una cinta transportadora que tiene una pluralidad de rodillos eléctricamente conductores que tienen […]
Correa transportadora que incluye unos rodillos apilados bidireccionales, del 15 de Mayo de 2019, de LAITRAM L.L.C.: Un transportador que comprende: una correa transportadora que incluye: una pluralidad de primeros conjuntos de rodillos dispuestos en unas primeras […]
Correa transportadora que incluye unos rodillos apilados bidireccionales, del 18 de Octubre de 2018, de LAITRAM L.L.C.: Una correa transportadora que comprende: una pluralidad de primeros conjuntos de rodillos dispuestos en unas primeras calles que se extienden […]
Cadena transportadora, del 29 de Junio de 2016, de KRONES AG: Cinta transportadora , en particular para un pasteurizador , con una superficie de transporte y con rodillos de soporte que están dispuestos por debajo […]
Equipo de manipulación de frutas, del 25 de Mayo de 2016, de MAF AGROBOTIC: Equipo de manipulación de frutas que comprende un primer transportador adaptado para transportar una línea de piezas individuales de fruta a través de una cámara, a través […]