Célula robotizada diseñada especialmente para el corte y fresado de tableros de piedra natural y similares.
1. Célula robotizada, especialmente diseñada para el corte, fresado y pulido de piezas de piedra natural y similares,
esencialmente caracterizada porque comprende:
Una mesa (1) que soportará las piezas a trabajar, dotada de un sistema basculante (2) para facilitar la carga de tableros o piezas a laborar (3), realizándose ésta con el tablero en posición vertical.
Una estructura suficientemente robusta (4), para soportar el puente (5) también robusto en cuanto a soportar esfuerzos y vibraciones, el cual en su parte inferior tendrá la brida adecuada para soportar el robot antropomorfo (6) de forma adecuada.
A su vez en la brida del sexto eje del robot (6), irá instalado un cabezal de corte o fresado formado por un motor eléctrico (7) con un sistema de platos para accionar el disco de corte (8) o la fresa (9), y los sistemas de protección antisalpicaduras (10) y auxiliares de paso de agua y proyección de la misma a la zona de corte.
2. Célula robotizada, especialmente diseñada para el corte, fresado y pulido de piezas de piedra natural y similares, según reivindicación anterior, caracterizada porque incorpora en el cabezal de corte un motor hidráulico o neumático.
3. Célula robotizada, especialmente diseñada para el corte, fresado y pulido de piezas de piedra natural y similares, según reivindicación 1, caracterizada porque incorpora en el cabezal un motor dotado de mecanismo de cambio automático de herramienta, capaz de accionar discos, fresas o platos de pulido.
4. Célula robotizada, especialmente diseñada para el corte, fresado y pulido de piezas de piedra natural y similares, según reivindicación 1, caracterizada porque incorpora un sistema de ventosa de vacío para la manipulación de piezas cortadas.
5. Célula robotizada, especialmente diseñada para el corte, fresado y pulido de piezas de piedra natural y similares, según reivindicación 1, caracterizada porque incorpora un sistema de corte mediante hidroabrasivo proyectado a alta velocidad mediante intensificador de presión, como herramienta de corte.
Tipo: Modelo de Utilidad. Resumen de patente/invención. Número de Solicitud: U201400773.
Solicitante: PROMATIC MILENIUM S.L.
Nacionalidad solicitante: España.
Inventor/es: REMESAL PEREZ,ALBERTO.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B25J5/02 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 5/00 Manipuladores montados sobre ruedas o sobre soportes móviles (B25J 1/00 tiene prioridad; manipuladores de control programado B25J 9/00). › que se desplazan sobre un camino-guía.
- B28D1/18 B […] › B28 TRABAJO DEL CEMENTO, DE LA ARCILLA O LA PIEDRA. › B28D TRABAJO DE LA PIEDRA O DE MATERIALES SIMILARES A LA PIEDRA (máquinas o procedimientos de explotación de minas o canteras E21C). › B28D 1/00 Trabajo de la piedra o de los materiales análogos, p. ej. ladrillos, hormigón, no previsto en otro lugar; Máquinas, dispositivos, herramientas a este efecto (trabajo fino de las perlas, joyas, cristales B28D 5/00; trabajo con muela o pulido B24; dispositivos o medios para desgastar o acondicionar el estado de superficies abrasivas B24B 53/00). › por fresado, p. ej. realización de surcos por medio de fresas.
- B28D1/22 B28D 1/00 […] › por recorte, p. ej. ejecución de entalladuras.
Descripción:
Célula robotizada, especialmente diseñada para el corte, fresado y pulido de piezas de piedra natural y similares.
OBJETO DE LA INVENCIÓN 5
La presente invención, tal y como se expresa en el enunciado de esta memoria descriptiva, se refiere a una célula con robot industrial antropomorfo, especialmente diseñada para el corte, fresado y pulido de tableros de piedra natural y similares, destinada e fresar, cortar, pulir, grabar y tallar bloques o tableros de los materiales referidos.
ANTECEDENTES DE LA INVENCIÓN.
En la actualidad, el corte o fresado de piezas de piedra y similares se realiza, mayoritariamente, mediante máquinas cortadoras de tipo puente o de cabezal fijo dotadas de cabezal de corte con disco diamantado. En los últimos años, debido a la demanda de productos acabados que implican la necesidad de realizar cortes inclinados o ingletado, según 15 se llama coloquialmente en el sector, se ha comenzado a demandar el hecho de que las cortadoras dispongan de los equipamientos necesarios para poder realizar este trabajo. Estas máquinas, desarrolladas y evolucionadas en cuanto a diseño y prestaciones desde los años 70, tienen hoy básicamente dos limitaciones en cuanto a dar solución a este llamado proceso de ingletado: 20
- Máquinas que disponen de cabezal inclinable de forma manual. La mayoría de las máquinas construidas desde 1990, suelen estar dotadas de este sistema. Tienen el inconveniente de que requiere la intervención del operador de la máquina para inclinar el cabezal, alinear las piezas a cortar y después volver a colocar el cabezal en su posición vertical de nuevo. Esto es lento y 25 por tanto costoso. Además, la alineación de las piezas a cortar es problemática en cuanto a que se requiere gran habilidad del operador.
- Máquinas más modernas que suelen estar dotadas de CNC. Desde 2000, comenzaron a verse máquinas dotadas del sistema de inclinación del cabezal de forma automática, si bien, el coste 30 de las máquinas de este tipo suele ser tan alto que las hace inaccesibles a la mayoría de las empresas del sector
El robot industrial antropomorfo, como parte activa en procesos industriales, tiene ya unas cuatro décadas de historia. 35
Procesos como la manipulación de piezas de fundición, la soldadura de piezas de automóviles y pintura de los mismos, o la carga y descarga de máquinas CNC o de inyección de plástico, serían actualmente inviables de forma competitiva sin la utilización de robots para ello.
Si bien fue inicialmente el sector de la automoción el promotor y causante del gran desarrollo de los robots, en los últimos 20 años el robot como sistema de fabricación se ha ido extendiendo a multitud de sectores industriales.
En el sector de la piedra natural y afines, el robot hizo su aparición en las fábricas en los 45 primeros años de este siglo. Se comenzaron a instalar robots para operación de manipulación y paletizado de piezas en grandes fábricas.
Poco después integradores, sobre todo italianos, desarrollaron células robotizadas en principio para la fabricación de elementos arquitectónicos donde se necesitaban máquinas CNC con 4 o 50 5 ejes, como esculturas, capiteles, etc.
La morfología y limitaciones de alcances y rigidez estructural de los robots antropomorfos de tamaños normales han hecho que el corte de tableros no haya sido abordado hasta la fecha mediante robots.
Por otra parte, el alto coste de los robots hasta hace pocos años y el alto coste de los 5 programas informáticos necesarios para la programación para que un robot opere como se desea, hacía inviable la utilización de estos para el corte y fresado de piedra natural. En los últimos años la madurez de estas tecnologías se ha traducido en un claro descenso del coste de adquisición es estos equipos y tecnologías.
DESCRIPCIÓN DE LA INVENCIÓN
La idea clave de la invención es la morfología de la célula robotizada, en la cual el robot industrial se coloca de forma invertida, suspendido de una estructura adecuada para ello.
Esta diferencia respecto a lo conocido hasta ahora, tiene dos ventajas claves para el éxito del 15 funcionamiento de la célula robotizada:
- El robot es capaz de alcanzar con el cabezal de corte las piezas de tamaños que se suelen procesar en el sector (3200 mm x 2000 mm) en prácticamente cualquier inclinación de la herramienta requerida. 20
- El robot incluye entre sus componentes sistemas sensibles a ambientes sucios y húmedos como son servomotores y componentes mecánicos de precisión. Al estar situado el robot de forma invertida, el mismo está más resguardado de la suciedad inherente al corte de piedra.
BREVE DESCRIPCIÓN DE LOS DIBUJOS.
Figura 1. Representa una vista en perspectiva de la célula robotizada, objeto de la invención
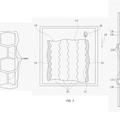
Figura 2. Representa otra vista en perspectiva de la célula robotizada, objeto de la invención.
DESCRIPCIÓN DE LA FORMA DE RELlZACIÓN PREFERIDA.
La célula robotizada estará formada, en esencia, de los siguientes componentes:
Una mesa (1) que soportará las piezas a trabajar, dotada de un sistema basculante (2) para facilitar la carga de tableros o piezas a laborar (3) , realizándose esta con el tablero en posición 35 vertical.
Una estructura suficientemente robusta (4) , para soportar el puente (5) también robusto en cuanto a soportar esfuerzos y vibraciones, el cual en su parte inferior tendrá la brida adecuada para soportar el robot (6) de forma adecuada. 40
A su vez en la brida del sexto eje del robot (6) , irá instalado un cabezal de corte o fresado formado por un motor eléctrico (7) con un sistema de platos para accionar el disco de corte (8) o la fresa (9) , y los sistemas de protección anti salpicaduras (10) Y auxiliares de paso de agua y proyección de la misma a la zona de corte. 45
Reivindicaciones:
1. Célula robotizada, especialmente diseñada para el corte, fresado y pulido de piezas de piedra natural y similares, esencialmente caracterizada porque comprende:
Una mesa (1) que soportará las piezas a trabajar, dotada de un sistema basculante (2) para 5 facilitar la carga de tableros o piezas a laborar (3) , realizándose esta con el tablero en posición vertical.
Una estructura suficientemente robusta (4) , para soportar el puente (5) también robusto en cuanto a soportar esfuerzos y vibraciones, el cual en su parte inferior tendrá la brida adecuada 10 para soportar el robot antropomorfo (6) de forma adecuada.
A su vez en la brida del sexto eje del robot (6) , irá instalado un cabezal de corte o fresado formado por un motor eléctrico (7) con un sistema de platos para accionar el disco de corte (8) o la fresa (9) , y los sistemas de protección anti salpicaduras (10) Y auxiliares de paso de agua 15 y proyección de la misma a la zona de corte.
2. Célula robotizada, especialmente diseñada para el corte, fresado y pulido de piezas de piedra natural y similares, según reivindicación anterior, caracterizada porque incorpora en el cabezal de corte un motor hidráulico o neumático. 20
3. Célula robotizada, especialmente diseñada para el corte, fresado y pulido de piezas de piedra natural y similares, según reivindicación 1, caracterizada porque incorpora en el cabezal un motor dotado de mecanismo de cambio automático de herramienta, capaz de accionar discos, fresas o platos de pulido. 25
4. Célula robotizada, especialmente diseñada para el corte, fresado y pulido de piezas de piedra natural y similares, según reivindicación 1, caracterizada porque incorpora un sistema de ventosa de vacío para la manipulación de piezas cortadas.
5. Célula robotizada, especialmente diseñada para el corte, fresado y pulido de piezas de piedra natural y similares, según reivindicación 1, caracterizada porque incorpora un sistema de corte mediante hidroabrasivo proyectado a alta velocidad mediante intensificador de presión, como herramienta de corte.
Patentes similares o relacionadas:
Tenazas para cortar losas o azulejos, del 1 de Julio de 2020, de BREVETTI MONTOLIT S.P.A.: Tenazas de grabado para azulejos o losas realizadas en material duro, que comprende un par de piezas de palanca (1a, 1b) articuladas entre […]
MÁQUINA PORTÁTIL PARA PARTIR PIEDRAS Y ANÁLOGOS, del 21 de Abril de 2020, de LIZARRAGA ZUÑIGA, Juan Jose: 1. Máquina portátil para partir piedras y análogos; caracterizada porque consta de un bastidor portátil en el que se desplaza linealmente un […]
 Método para fabricar paneles de piedra con dibujos continuos de múltiples lados, del 25 de Marzo de 2020, de Oh, Gun Jae: Un método para fabricar un panel de piedra con dibujos continuos de múltiples lados, comprendiendo el método:
cortar franjas en las que se forman dibujos lineales […]
Método para fabricar paneles de piedra con dibujos continuos de múltiples lados, del 25 de Marzo de 2020, de Oh, Gun Jae: Un método para fabricar un panel de piedra con dibujos continuos de múltiples lados, comprendiendo el método:
cortar franjas en las que se forman dibujos lineales […]
Aparato de marcado y rebanado, del 22 de Enero de 2020, de Gunntech Manufacturing, Inc: Un aparato para cortar una pieza de trabajo , comprendiendo el aparato : un par de rieles separados : un carro de cuchillas enganchado de […]
Método de procesamiento por láser, del 6 de Noviembre de 2019, de HAMAMATSU PHOTONICS K.K.: Un método de procesamiento por láser, que comprende las etapas de: irradiar un objeto a procesar, que comprende un sustrato de silicio , que tiene una cara frontal […]
DISPOSITIVO AUXILIAR PARA EL APOYO DE BALDOSAS EN UNA POSICIÓN DE CORTE, del 30 de Septiembre de 2019, de GERMANS BOADA S.A.: Dispositivo auxiliar para el apoyo de baldosas en posición de corte; que comprende: una base adecuada para posicionarse sobre una superficie o elemento de soporte, una pieza […]
Máquina de grabado simplificada con una barra de guía rectilínea, del 6 de Febrero de 2019, de BREVETTI MONTOLIT S.P.A.: Máquina de grabado para losas planas, que comprende una barra rectilínea y un carro montado un carro montado que se desliza libremente a lo largo […]
DISPOSITIVO DE AUTORREGULACIÓN DE UN CABEZAL DE CORTE PARA CORTADORAS MONO-GUÍA, del 2 de Agosto de 2018, de GERMANS BOADA S.A.: El cabezal de corte incluye unos juegos de rodamientos que comprenden unos rodamientos fijos y un rodamiento ajustable que actúan sobre unas […]