Procedimiento de caracterización de trayectorias encarriladas desconocidas recorridas por un móvil, y dispositivo utilizado.
Procedimiento de caracterización de trayectorias encarriladas desconocidas recorridas por un móvil,
y dispositivo utilizado.
El procedimiento, en el caso más completo, comprende las etapas de:
a) Generar una serie de parámetros característicos de cada tramo de la trayectoria durante un recorrido de reconocimiento del móvil.
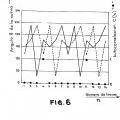
b) Caracterizar la trayectoria mediante autocorrelación de desfase variable de la serie de parámetros característicos, obteniendo su periodicidad. Siendo el número de tramos del circuito N coincidente con la distancia entre dos máximos consecutivos de la función autocorrelación C(k).
c) Localizar la posición del móvil sobre la trayectoria mediante correlación de desfase variable de la trayectoria obtenida en la etapa b), con el movimiento del móvil sobre la misma.
d) Controlar automáticamente la velocidad del móvil en función de los parámetros obtenidos para cada tramo.
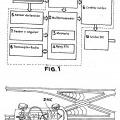
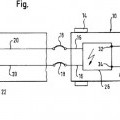
El equipo que ejecuta el procedimiento anterior, comprende un dispositivo de medida y control (DMC) incorporado al móvil, y un mando electrónico para el piloto (MEP) conectado con el dispositivo anterior vía radio.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201430808.
Solicitante: SALAS ROJAS, Rocío.
Nacionalidad solicitante: España.
Inventor/es: LAMBÁS SEÑAS,Fernando.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A63H18/12 NECESIDADES CORRIENTES DE LA VIDA. › A63 DEPORTES; JUEGOS; DISTRACCIONES. › A63H JUGUETES, p. ej. TROMPOS, MUÑECOS, AROS O JUEGOS DE CONSTRUCCION. › A63H 18/00 Pistas o vías de rodamiento para juguetes (para ferrocarriles A63H 19/30; para vías férreas especiales A63H 21/00 ); Propulsión por interacción especial entre el vehículo y su vía de rodamiento. › Suministro de corriente eléctrica al vehículo a través de la vía.
- A63H29/22 A63H […] › A63H 29/00 Mecanismos motores para juguetes en general. › Mecanismos eléctricos (alimentación de energía eléctrica por la vía A63H 18/12).
PDF original: ES-2552711_A1.pdf

Patentes similares o relacionadas:
Sección de calzada de una pista de carreras de coches para vehículos de modelismo, del 8 de Enero de 2020, de HESSE, KURT: Sección de calzada de una pista de carreras de coches para vehículos de modelismo con un elemento de carretera , que forma con preferencia una […]
Procedimiento y dispositivo para controlar y/o monitorear vehículos de carrera en una pista de carrera, del 3 de Julio de 2019, de NOVOMATIC AG: Un procedimiento para controlar y/o monitorear una pluralidad de vehículos de carreras (V1, V2, Vn) controlados por participantes de la carrera (T1, T2, Tn) […]
Dispositivo de recarga de energía para un equipo de almacenamiento de energía a bordo de un vehículo, del 12 de Junio de 2019, de ALSTOM Transport Technologies: Dispositivo de recarga de energía para un equipo de almacenamiento de energía a bordo de un vehículo , que comprende al menos un dispositivo de alimentación de […]
Juguete, del 23 de Mayo de 2018, de Stadlbauer Marketing + Vertrieb GmbH: Sistema con una pista conectada a una fuente de energía eléctrica, al menos, un vehículo para funcionar sobre la pista , al menos, un controlador manual […]
 Circuito de carreras para coches a escala reducida en pista total, del 15 de Octubre de 2015, de MOYA PADILLA, Judit: 1. Circuito de carreras para coches a escala reducida en pista total, consistente en un nuevo juego para carreras de coches caracterizado porque comprende un circuito compuesto […]
Circuito de carreras para coches a escala reducida en pista total, del 15 de Octubre de 2015, de MOYA PADILLA, Judit: 1. Circuito de carreras para coches a escala reducida en pista total, consistente en un nuevo juego para carreras de coches caracterizado porque comprende un circuito compuesto […]
Juguete, del 26 de Marzo de 2014, de Stadlbauer Marketing + Vertrieb GmbH: Juguete con una pista acoplada a una fuente de energia eléctrica, por lo menos un vehículo para su funcionamiento sobre la pista , así como por lo menos […]
TRAMO DE PISTA Y ELEMENTO DE FIJACIÓN PARA UN AUTÓDROMO DE JUGUETE, del 26 de Diciembre de 2011, de Stadlbauer Marketing + Vertrieb GmbH: Tramo de pista para un autódromo de juguete con guiado por carril, que en por lo menos una cara frontal presenta un dispositivo de fijación […]
 VEHÍCULO DE JUGUETE CON MOTOR PROPULSOR ELÉCTRICO, del 24 de Junio de 2011, de Stadlbauer Marketing + Vertrieb GmbH: Vehículo de juguete , en particular para autódromos guiados por carril , provisto de un motor de propulsor eléctrico que presenta dos conexiones eléctricas del motor […]
VEHÍCULO DE JUGUETE CON MOTOR PROPULSOR ELÉCTRICO, del 24 de Junio de 2011, de Stadlbauer Marketing + Vertrieb GmbH: Vehículo de juguete , en particular para autódromos guiados por carril , provisto de un motor de propulsor eléctrico que presenta dos conexiones eléctricas del motor […]