Dispositivo de campos táctiles de funcionamiento capacitivo.
Cuerpo multicapa (1) con una primera zona (11) transparente para el ojo humano,
con una multiplicidad de campos táctiles (13) dispuestos en la primera zona (11), con un sustrato de soporte (30) transparente al menos en la primera zona (11) y con una primera capa (31) parcial electroconductiva que es transparente para el ojo humano al menos en la primera zona (11) y que en la primera zona (11) presenta zonas de emisión (41), zonas de recepción (42) y zonas de conexión (43, 431-435) electroconductivas que están formadas respectivamente por un esquema de pistas (40) electroconductivas no transparentes, estando las pistas conductoras compuestas de un material y aplicadas con un espesor de material con el que la primera capa electroconductiva, estando realizada por toda su superficie mediante estos materiales, no parece transparente para el observador humano, estando elegido el ancho de las pistas (40) en la primera zona (11) de tal forma que las zonas de emisión (41), zonas de recepción (42) y zonas de conexión (43, 431-435) electroconductivas en la primera zona (11) son transparentes para el ojo humano, estando realizadas en la zona de cada campo táctil (13) en la primera capa (31) una de las zonas de emisión (41) electroconductivas y una de las zonas de recepción (42) electroconductivas que estando separados galvánicamente entre ellas están dispuestas a ambos lados de un intersticio (45) que las separa, estando n zonas de emisión (41) de diferentes campos táctiles (13) en la primera capa (31) conectadas eléctricamente entre ellas y con una zona de contacto realizada fuera de la primera zona (11) en la primera capa (31), a través de una de las zonas de conexión (43) electroconductivas realizadas en la primera capa, y estando m zonas de recepción (42) de diferentes campos táctiles (13) en la primera capa (31) conectadas eléctricamente entre ellas y con la zona de contacto realizada fuera de la primera zona (11) en la primera capa (31), a través de una de las zonas de conexión (43, 431-435) electroconductivas realizadas en la primera capa, siendo n >2 y m >2, estando dispuestos los campos táctiles (3) según una matriz bidimensional con dos o más columnas (51) y con dos o más líneas (52),
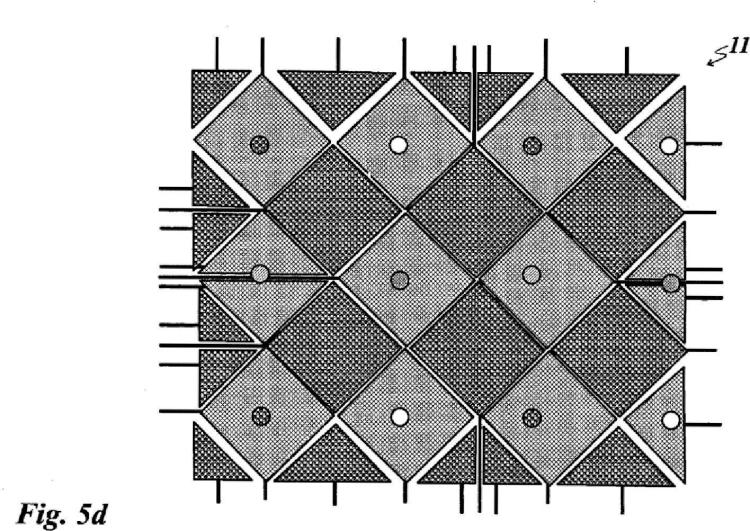
estando dispuesta en los campos táctiles (13) de un primer grupo de campos táctiles la zona de emisión (41) respectivamente a la izquierda de la zona de recepción (42), y estando dispuesta en las campos táctiles (13) de un segundo grupo de campos táctiles la zona de emisión (41) respectivamente a la derecha de la zona de recepción (42), estando dispuestos en cada una de las líneas (72) de la matriz, alternando unas al lado de otras, campos táctiles del primer grupo y del segundo grupo, de tal forma que en el límite entre dos campos táctiles de la misma línea están opuestas respectivamente dos zonas de emisión (41) o dos zonas de recepción (42), y estando dispuestos en una primera zona parcial (71) de la matriz, tanto en la dirección de las líneas (52) como en la dirección de las columnas (51), alternando unos al lado de otros, campos táctiles (13) del primer grupo y del segundo grupo, de tal forma que en el límite entre dos campos táctiles (13) de la misma línea (52) están opuestas alternando dos zonas de emisión (41) y dos zonas de recepción (42), presentando la matriz en la primera zona parcial (71) dos o más líneas (52) y dos o más columnas (51).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2012/061930.
Solicitante: POLYIC GMBH & CO. KG.
Nacionalidad solicitante: Alemania.
Dirección: TUCHERSTRASSE 2 90763 FURTH ALEMANIA.
Inventor/es: FIX, WALTER, ULLMANN, ANDREAS.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G06F3/044 FISICA. › G06 CALCULO; CONTEO. › G06F PROCESAMIENTO ELECTRICO DE DATOS DIGITALES (sistemas de computadores basados en modelos de cálculo específicos G06N). › G06F 3/00 Disposiciones de entrada para la transferencia de datos destinados a ser procesados en una forma utilizable por el computador; Disposiciones de salida para la transferencia de datos desde la unidad de procesamiento a la unidad de salida, p. ej. disposiciones de interfaz. › mediante medios capacitivos.
PDF original: ES-2550794_T3.pdf
Fragmento de la descripción:
Dispositivo de campos táctiles de funcionamiento capacitivo.
La invención se refiere a un cuerpo multicapa realizado como dispositivo de campos táctiles capacitivo con una primera zona transparente en la que está dispuesta una multiplicidad de campos táctiles.
Para la fabricación de pantallas táctiles controladas por sensores hasta ahora frecuentemente se requiere una estructura multicapa que presente al menos dos planos de pistas conductoras separados por un aislador. Los planos 10 de pistas conductoras están formados por ejemplo por un material conductivo transparente como el ITO.
Los documentos EP2045698A2 y US2011/0022351A1 dan a conocer dispositivos capacitivos de campos táctiles ópticamente transparentes, con una sola lógica. Los documentos US2011/0102370A1 y WO2011/065383 dan a conocer estructuras discontinuas de electrodos para dispositivos capacitivos de campos táctiles.
La invención tiene el objetivo de proporcionar una estructura mejorada de un cuerpo multicapa con una multiplicidad de campos táctiles dispuestos en una zona transparente del cuerpo multicapa.
Este objetivo se consigue mediante un dispositivo según la reivindicación 1. 20 Algunas variantes ventajosas de la invención se indican en las reivindicaciones subordinadas.
Mediante la invención se consigue la ventaja de que por la realización monocapa de los campos táctiles y su cableado en la zona transparente así como por la configuración y estructuración especiales de la primera capa 25 electroconductiva es posible fabricar de manera económica campos táctiles de alta transparencia.
Según una forma de realización ventajosa se elige n y/o m > 3 y especialmente > 4. Además, resulta ventajoso si las n zonas de emisión y/o m zonas de recepción de la zona de conexión correspondiente están conectadas entre ellas dentro de la primera zona.
Resulta ventajoso además si entre 30 y 70% de las zonas de recepción y/o de las zonas de emisión de diferentes campos táctiles están conectadas con n o m zonas de emisión o zonas de recepción adicionales a través de una zona de conexión.
Según la invención, los campos táctiles están dispuestos en una matriz bidimensional con dos o más columnas o con dos o más líneas, especialmente con cuatro o más columnas y cuatro o más líneas. Ha resultado que es ventajoso que la matriz presente entre cuatro y diez líneas y cuatro o más líneas, especialmente 16 o más columnas. Se ha mostrado que cumpliendo estas reglas de dimensionamiento resulta una fabricación especialmente económica en comparación con una estructura de 2 capas.
Los campos táctiles pueden sucederse con un ancho de trama constante en las líneas o columnas de la matriz. Sin embargo, también es posible que varíe el ancho de trama y que las columnas y líneas de la matriz no estén determinadas respectivamente por una línea, sino por un sistema de coordenadas transformado estando realizadas por ejemplo en forma de líneas ondulares o de arcos circulares.
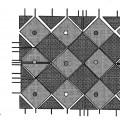
Según la invención, en campos táctiles está dispuesto un primer grupo de campos táctiles de las zonas de emisión respectivamente a la izquierda de la zona de recepción y en los campos táctiles de un segundo grupo de campos táctiles de las zonas de emisión está dispuesto respectivamente a la derecha de la zona de recepción. En cada una de las líneas de la matriz están dispuestos ahora, alternando unos al lado de otros, campos táctiles del primer grupo 50 y campos táctiles del segundo grupo, de tal forma que en los límites entre dos campos táctiles de la misma línea están opuestas respectivamente dos zonas de emisión o dos zonas de recepción. Mediante esta disposición variada de zonas de emisión y zonas de recepción de los campos táctiles aumenta considerablemente el número de zonas de emisión y zonas de recepción que se pueden conectar entre ellos eléctricamente con una zona de conexión sin perjudicar el funcionamiento de los campos táctiles o la transparencia de la primera zona.
Hay que tener en cuenta que para la aplicación de las reglas de dimensionamiento expuestas anteriormente se parte de que las columnas que separan la zona de recepción de la zona de emisión están orientadas más en la dirección de las columnas de la matriz que en la dirección de las líneas de la matriz. Por lo tanto, para determinar qué dirección de secuencia forma una columna o una línea de la matriz, las reglas de dimensionamiento antes citadas
han de basarse en la definición antes citada. Derecha e izquierda corresponde a la dirección hacia la columna siguiente o la columna anterior.
Sobre la base de esta regla de dimensionamiento básica resultan especialmente las siguientes variantes de 5 realización ventajosas.
Resulta especialmente ventajoso además si en cada columna están dispuestos respectivamente campos táctiles del mismo grupo de campos táctiles. De esta manera, dentro de la matriz resultan matrices en las que están dispuestas de forma contigua al menos cuatro zonas de emisión o cuatro zonas de recepción.
Resulta ventajoso reunir cuatro zonas de emisión dispuestas de esta manera contigua formando un grupo de emisión y conectarlas entre ellas y con una zona de conexión asignada, a través de una de las zonas de conexión, y/o reunir cuatro de estas zonas de recepción dispuestas de forma contigua unas respecto a otras formando un grupo de recepción y conectarlas entre ellas y con la zona de conexión asignada, a través de una de las zonas de conexión. De esta manera, se sigue reduciendo la parte de las zonas de conexión en la superficie total de la primera zona y de esta manera se sigue mejorando la transparencia de la primera zona y la funcionalidad de las zona transparentes.
De esta manera, en una matriz de por ejemplo 4 x 4 campos táctiles se pueden formar por ejemplo cuatro grupos de emisión o grupos de recepción. Con un número correspondientemente mayor de campos táctiles en la matriz resulta un número correspondientemente mayor de grupos de recepción y grupos de emisión. Los grupos de recepción y grupos de emisión están dispuestos preferentemente con un desplazamiento entre ellos en forma de tabla de ajedrez. Así, por ejemplo, en la dirección de columnas se suceden respectivamente uno o varios grupos de emisión o grupos de recepción, mientras que en la dirección de líneas se alternan grupos de emisión y grupos de recepción.
La secuencia de grupos de emisión y grupos de recepción está desplazada respectivamente medio período en la dirección de columnas. Por período se entiende la distancia de los centros de gravedad de superficie de dos grupos de emisión o grupos de recepción que se suceden en la dirección de columnas.
Resulta especialmente ventajoso si para al menos un grupo de emisión están dispuestos de forma contigua unos respecto a otros cuatro grupos de recepción o si para al menos un grupo de recepción están dispuestos de forma contigua unos respecto a otros cuatro grupos de emisión.
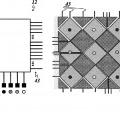
Asimismo, resulta ventajoso si las zonas de conexión que conectan los grupos de emisión y grupos de recepción con las zonas de contacto asignadas presentan en la primera zona secciones de pistas conductoras que se extienden 35 desde dentro hacia fuera y que se extienden en la zona de límite entre dos columnas o dos líneas de la matriz. Resulta especialmente ventajoso si las secciones de pistas conductoras de este tipo se extienden hacia todos los lados desde dentro hacia fuera, es decir, tanto hacia arriba como hacia abajo, hacia la izquierda y hacia la derecha y por tanto si dichas secciones de pistas conductoras se extienden en forma de estrella hacia todos los lados desde dentro hacia fuera. De esta manera, se consigue la ventaja de que las zonas de conexión abandonan la primera zona para contactar las zonas de contacto, estando uniformemente distribuidas por la zona marginal completa de la primera zona, y por tanto se puede mantener especialmente reducida la parte de superficie de las zonas de conexión en la primera zona.
Además, es posible que dos o más zonas de emisión o zonas de recepción dispuestas de forma contigua estén 45 unidas formando una zona de superficie entera electroconductiva que tiene especialmente una forma rectangular, cuadrada u octagonal. Por ejemplo, es posible que las zonas de emisión o zonas de recepción asignadas a un grupo de emisión o grupo de recepción se conecten mediante una zona de conexión formando una zona de superficie entera electroconductiva que tenga especialmente la forma descrita anteriormente.
Además, ha resultado ser ventajoso si las líneas de la matriz y el eje longitudinal de la primera zona presentan un desplazamiento angular... [Seguir leyendo]
Reivindicaciones:
1. Cuerpo multicapa (1) con una primera zona (11) transparente para el ojo humano, con una multiplicidad de campos táctiles (13) dispuestos en la primera zona (11) , con un sustrato de soporte (30) 5 transparente al menos en la primera zona (11) y con una primera capa (31) parcial electroconductiva que es transparente para el ojo humano al menos en la primera zona (11) y que en la primera zona (11) presenta zonas de emisión (41) , zonas de recepción (42) y zonas de conexión (43.
43. 435) electroconductivas que están formadas respectivamente por un esquema de pistas (40) electroconductivas no transparentes, estando las pistas conductoras compuestas de un material y aplicadas con un espesor de material con el que la primera capa electroconductiva, 10 estando realizada por toda su superficie mediante estos materiales, no parece transparente para el observador humano, estando elegido el ancho de las pistas (40) en la primera zona (11) de tal forma que las zonas de emisión (41) , zonas de recepción (42) y zonas de conexión (43.
43. 435) electroconductivas en la primera zona (11) son transparentes para el ojo humano, estando realizadas en la zona de cada campo táctil (13) en la primera capa (31) una de las zonas de emisión (41) electroconductivas y una de las zonas de recepción (42) electroconductivas que 15 estando separados galvánicamente entre ellas están dispuestas a ambos lados de un intersticio (45) que las separa, estando n zonas de emisión (41) de diferentes campos táctiles (13) en la primera capa (31) conectadas eléctricamente entre ellas y con una zona de contacto realizada fuera de la primera zona (11) en la primera capa (31) , a través de una de las zonas de conexión (43) electroconductivas realizadas en la primera capa, y estando m zonas de recepción (42) de diferentes campos táctiles (13) en la primera capa (31) conectadas eléctricamente entre ellas y con la zona de contacto realizada fuera de la primera zona (11) en la primera capa (31) , a través de una de las zonas de conexión (43.
43. 435) electroconductivas realizadas en la primera capa, siendo n > 2 y m > 2, estando dispuestos los campos táctiles (3) según una matriz bidimensional con dos o más columnas (51) y con dos o más líneas (52) , estando dispuesta en los campos táctiles (13) de un primer grupo de campos táctiles la zona de emisión (41) respectivamente a la izquierda de la zona de recepción (42) , y estando dispuesta en las campos táctiles (13) de un segundo grupo de campos táctiles la zona de emisión (41) respectivamente a la derecha de la zona de recepción (42) , estando dispuestos en cada una de las líneas (72) de la matriz, alternando unas al lado de otras, campos táctiles del primer grupo y del segundo grupo, de tal forma que en el límite entre dos campos táctiles de la misma línea están opuestas respectivamente dos zonas de emisión (41) o dos zonas de recepción (42) , y estando dispuestos en una primera zona parcial (71) de la matriz, tanto en la dirección de las líneas (52) como en la dirección de las columnas (51) , alternando unos al lado de otros, campos táctiles (13) del primer grupo y del segundo grupo, de tal forma que en el límite entre dos campos táctiles (13) de la misma línea (52) están opuestas alternando dos zonas de emisión (41) y dos zonas de recepción (42) , presentando la matriz en la primera zona parcial (71) dos o más líneas (52) y dos o más columnas (51) .
2. Cuerpo multicapa (1) según la reivindicación 1, caracterizado porque en cada columna (51) están dispuestos respectivamente campos táctiles (13) del mismo grupo de campos táctiles. 40
3. Cuerpo multicapa (1) según una de las reivindicaciones 1 a 2, caracterizado porque un grupo de emisión (61) de cuatro zonas de emisión (41) dispuestas de forma contigua están conectadas, entre ellas y con las zonas de contacto asignadas, a través de una de las zonas de conexión (431) , y/o porque un grupo de recepción (62) de cuatro zonas de recepción (42) dispuestas de forma contigua están conectadas entre ellas y con la zona de 45 contacto asignada, a través de una de las zonas de conexión (431) .
4. Cuerpo multicapa (1) según una de las reivindicaciones 1 a 3, caracterizado porque dos o más grupos de emisión (61) y dos o más grupos de recepción (62) están dispuestos de forma desplazada unos respecto a otros en forma de tabla de ajedrez, de tal forma que para al menos un grupo de emisión (61) están dispuestos de forma 50 contigua cuatro grupos de recepción (62) o para al menos un grupo de recepción (62) están dispuestos de forma contigua cuatro grupos de emisión (61) .
5. Cuerpo multicapa (1) según una de las reivindicaciones 1 a 4, caracterizado porque las zonas de conexión (43.
43. 435) presentan zonas de conexión (44) que se extienden desde dentro hacia fuera con respecto a 55 la primera zona (11) , en la zona de límite entre dos columnas (51) o dos líneas (52) de la matriz, estando previstas especialmente cuatro o más secciones de pistas conductoras (44) de este tipo que se extienden en forma de estrella hacia todos los lados desde dentro hacia fuera.
6. Cuerpo multicapa (1) según una de las reivindicaciones 1 a 5, caracterizado porque dos o más zonas 14
de emisión o zonas de recepción (41, 42) dispuestas de forma contigua están conectadas por la zona de conexión (43) correspondiente, formando una zona electroconductiva de superficie entera que tiene especialmente una forma rectangular, cuadrada u octangular.
7. Cuerpo multicapa (1) según una de las reivindicaciones 1 a 6, caracterizado porque las líneas de la matriz y el eje longitudinal de la primera zona (11) presentan un desplazamiento angular entre ellos, encerrando especialmente un ángulo de 45º.
8. Cuerpo multicapa (1) según una de las reivindicaciones 1 a 7, caracterizado porque respectivamente 10 dos o más zonas de emisión (41) dispuestas de forma contigua están agrupadas formando un grupo de emisión (61)
o respectivamente dos o más zonas de recepción (42) dispuestas de forma contigua están agrupadas formando un grupo de recepción (62) y porque una o varias de las zonas de conexión (432, 433) presentan secciones de pistas conductoras (44) que se extienden desde dentro hacia fuera con respecto a la primera zona (11) y que cortan respectivamente uno o varios de los grupos de emisión (61) o grupos de recepción (62) , presentando especialmente las secciones de pistas conductoras (441) un ensanchamiento en la zona en la que cortan un grupo de emisión o grupo de recepción (61, 62) .
9. Cuerpo multicapa (1) según una de las reivindicaciones anteriores, caracterizado porque en la primera zona parcial (71) están conectadas eléctricamente entre ellas a través de una zona de conexión (43, 434) 20 correspondiente a) respectivamente todas las zonas de recepción (42) de cada columna (51) o b) todas las zonas de emisión (41) de cada columna (51)
estando conectadas eléctricamente entre ellas, a través de una zona de conexión (435) correspondiente especialmente, en el caso a) , todas las zonas de emisión (41) de la línea superior o, en el caso b) , todas las zonas de recepción (42) de la línea superior.
10. Cuerpo multicapa (1) según una de las reivindicaciones anteriores, caracterizado porque una o varias de las zonas de conexión (43) en la primera zona parcial (71) presentan secciones de pistas conductoras (44) que se extienden desde dentro hacia fuera con respecto a la primera zona (11) en la dirección de las columnas (51) de la matriz y que están dispuestas especialmente en la zona de límite entre dos columnas (51) de la matriz.
11. Cuerpo multicapa (1) según una de las reivindicaciones anteriores, caracterizado porque la matriz
presenta una segunda zona parcial que está dispuesta por encima de la primera zona parcial de la matriz y porque en la segunda zona parcial (72) de la matriz están dispuestos, igualmente tanto en las líneas como en las columnas, alternando unos al lado de otros, campos táctiles (13) del primer grupo y del segundo grupo, presentando especialmente la segunda zona parcial una disposición, en simetría especular con respecto a la línea límite entre la primera y la segunda zona parcial, de zonas de emisión (41) y zonas de recepción (42) y/o de zonas de conexión con respecto a la primera zona parcial (71) .
12. Cuerpo multicapa (1) según una de las reivindicaciones anteriores, caracterizado porque la matriz presenta al menos una tercera zona parcial (73, 74) que presenta la misma disposición de zonas de emisión (41) y de zonas de recepción (42) y/o de zonas de conexión (43) que la primera zona parcial (71) o la segunda zona parcial 45 (72) , y porque las terceras zonas parciales (73, 74) están dispuestas al lado de la primera zona parcial (71) o al lado de la segunda zona parcial (72) .
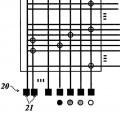
13. Cuerpo multicapa (1) según una de las reivindicaciones anteriores, caracterizado porque en una segunda zona (12) que circunda la primera zona (11) está prevista una segunda capa (33) electroconductiva, a 50 través de la que dos o más de las zonas de conexión (43) de la primera capa (31) están acopladas eléctricamente entre ellas, y especialmente las zonas de contacto de la primera capa (31) están conectadas con un conector de contacto eléctrico (20) a través de la segunda capa (33) y/o a través de pistas conductoras realizadas en la primera capa (31) o forman un conector de contacto eléctrico o partes de un conector de contacto eléctrico.
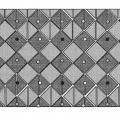
14. Cuerpo multicapa (1) según una de las reivindicaciones anteriores, caracterizado porque en cada campo táctil está realizado en forma de meandro el intersticio entre la zona de emisión y la zona de recepción, y especialmente uno, varios o todos los campos táctiles están realizados de forma triangular y presentan respectivamente un intersticio en forma de meandro entre la zona de emisión y la zona de recepción.
15. Cuerpo multicapa (1) según una de las reivindicaciones anteriores, caracterizado porque el respectivo intersticio separador entre las zonas de emisión (41) y las zonas de recepción (42) presenta otro ancho que el intersticio entre las pistas conductoras de conexión salientes de campos táctiles (19) interiores y las correspondientes zonas de emisión y/o zonas de recepción adyacentes a estas.
Patentes similares o relacionadas:
 Producto en capas conductor transparente, panel táctil y dispositivo de visualización, del 27 de Mayo de 2020, de VTS-Touchsensor Co., Ltd: Un laminado conductor transparente que comprende:
una primera capa de electrodos que incluye una pluralidad de primeros electrodos […]
Producto en capas conductor transparente, panel táctil y dispositivo de visualización, del 27 de Mayo de 2020, de VTS-Touchsensor Co., Ltd: Un laminado conductor transparente que comprende:
una primera capa de electrodos que incluye una pluralidad de primeros electrodos […]
LÁMINA PLÁSTICA CAPACITIVA PARA DISPOSITIVOS MÓVILES, del 21 de Mayo de 2020, de GVAM GUÍAS INTERACTIVAS, S.L: 1. Lámina plástica capacitiva adaptable a la pantalla táctil de un dispositivo móvil , tal como un smartphone o una tableta, caracterizada por incluir al […]
Panel táctil y dispositivo de visualización, del 13 de Mayo de 2020, de VTS-Touchsensor Co., Ltd: Panel táctil capacitivo electrostático en el que hay dispuestos una pluralidad de electrodos conductores en una primera superficie de un sustrato dieléctrico transparente […]
Electrodo de sensor táctil, panel táctil y dispositivo de visualización, del 26 de Febrero de 2020, de VTS-Touchsensor Co., Ltd: Un electrodo de sensor táctil que comprende: una primera capa de electrodo que tiene una pluralidad de primeros electrodos de tira (31DP) dispuestos espaciados […]
Sensor táctil capacitivo proyectado grande, del 18 de Diciembre de 2019, de Displax S.A: Un sensor táctil capacitivo proyectado, el sensor que comprende: una malla de sensores que incluye filas eléctricamente […]
Dispositivo de detección de variación de impedancia mínima, del 4 de Noviembre de 2019, de Invention Element Inc: Un dispositivo de detección de variación de impedancia mínima , que comprende: un amplificador diferencial que incluye un primer extremo de entrada […]
 Sensor táctil capacitivo, del 25 de Septiembre de 2019, de Displax S.A: Un sensor táctil capacitivo proyectado, que comprende:
una rejilla de detección que incluye una traza que i) tiene un punto inicial […]
Sensor táctil capacitivo, del 25 de Septiembre de 2019, de Displax S.A: Un sensor táctil capacitivo proyectado, que comprende:
una rejilla de detección que incluye una traza que i) tiene un punto inicial […]
Aparato de entrada para displays capacitivos táctiles, del 18 de Septiembre de 2019, de STAEDTLER Mars GmbH & Co. KG: Uso de un aparato de entrada para displays capacitivos táctiles de las denominadas computadoras tableta o bien Smart Phones, para llevar a cabo un […]