Método de calibración para mejorar la velocidad de autoenfoque en cámaras digitales.
Método de calibración para mejorar la velocidad de autoenfoque en cámaras digitales.
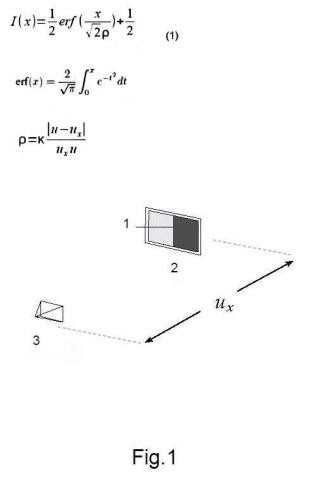
Método caracterizado por comprender una primera etapa de colocar un patrón de calibración enfrente de la cámara; en una segunda etapa capturar una secuencia de imágenes enfocando la cámara a diferentes distancias alrededor de la posición del patrón; extraer de cada imagen del patrón de calibración un perfil de intensidad de los niveles de gris; para cada perfil, I(x) obtenido se estima un valor del radio de desenfoque ρ ajustando la ecuación (1) al perfil correspondiente:
****IMAGEN-01****
en donde erf es la función error:
****IMAGEN-02****
y obtener el valor de la constante de la cámara ajustando la curva de los valores del radio de desenfoque ρ en función los valores de u, según la siguiente ecuación:
****IMAGEN-03****
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201300678.
Solicitante: UNIVERSITAT ROVIRA I VIRGILI.
Nacionalidad solicitante: España.
Inventor/es: GARCIA GARCIA,MIGUEL ANGEL, PERTUTZ ARROYO,Said David, SAVI PUIG VALLS,Doménec.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G03B1/00 FISICA. › G03 FOTOGRAFIA; CINEMATOGRAFIA; TECNICAS ANALOGAS QUE UTILIZAN ONDAS DISTINTAS DE LAS ONDAS OPTICAS; ELECTROGRAFIA; HOLOGRAFIA. › G03B APARATOS O DISPOSITIVOS PARA HACER FOTOGRAFIAS, PARA PROYECTARLAS O VERLAS; APARATOS O DISPOSITIVOS QUE UTILIZAN TECNICAS ANALOGAS UTILIZANDO ONDAS DIFERENTES DE LAS ONDAS OPTICAS; SUS ACCESORIOS (partes ópticas de estos aparatos G02B; materiales fotosensibles para la fotografía o procedimientos fotográficos G03C; aparellaje para el tratamiento de materiales fotosensibles después de la exposición G03D). › Manipulación de la película de aparatos fotográficos, aparatos de proyección o reproductores.
Fragmento de la descripción:
Método de calibración para mejorar la velocidad de autoenfoque en cámaras digitales
Campo de la técnica
La presente invención consiste en un método de calibración que tiene como
objetivo reducir la duración del tiempo de búsqueda en el autoenfoque de cámaras digitales, es decir que dicho método permite acelerar el proceso de autoenfoque o muestreado de foco (focus sampling) resolviéndolo de una manera muy eficiente.
La invención permite encontrar la constante de la cámara por medio de un 10 proceso de calibración simple y robusto, sin necesidad de conocer parámetros físicos de la cámara tales como longitud focal, diámetro de la lente y tamaño de pixel.
Antecedentes de la invención
Según el modelo de la lente fino existe un intervalo para determinar la profundidad de campo de cámaras convencionales de lente gruesa. Así en A.Hornberg 15 en Wiley-VCH Handbook of machine visión de publicado el año 2006 utilizando la variable v que es la distancia entre el dispositivo sensor (CCD) y el primer punto nodal de la lente.
En fotografía y a partir del modelo de lente fino y de las ecuaciones de estimación de la profundidad de campo DOF, es posible determinar aproximadamente 20 los límites próximo y lejano del DOF, y en consecuencia generar unas tablas de consulta que dependen del modelo de cámara. El modelo de cámara se utiliza para determinar el tamaño aproximado del círculo de desenfoque como una función del tamaño del sensor y del número real de píxeles.
En M.Muhammad i T.S. Choi Sampling for shape from focus in ópticaI 25 microscopyen IEEE Trans. Image Process., vol.34 no. 3, pp.564-573 publicado el año 2012 se desarrolló un criterio de enfoque a partir de forma, aplicable a microscopía.
Sin embargo estos métodos requieren conocer de forma exacta algunos parámetros de la cámara, tales como la longitud focal, la apertura numérica, el tamaño real del pixel y el círculo de confusión 30
Existen mecanismos para la calibración manual exhaustiva que requieren la realización de cuidadosas medidas en todo el rango de enfoque de la cámara ( http://www.edmundoptics.com/technical-resources-center/testing-targets/gauging- depth-of-field-in-your-imaging-system/ ). En la práctica éstos métodos son de aplicación 5 muy limitada en cámaras de foco variable. La ventaja del método de calibración propuesto, respecto al citado, es que permite realizar la calibración de todo el rango de enfoque de forma rápida y eficiente. Por otro lado el desenfoque máximo admisible pmax es un parámetro empírico definido de acuerdo con las dimensiones en pixeles reales y la resolución del sistema. Como resultado de ello se han diseñado algunos 10 métodos para estimar los límites del DOF y el círculo de desenfoque experimentalmente, pudiendo citar por ejemplo M. Subbarao et al. Depth recovery from blurred edges in proc. IEEE Conference on "Computer Vision and Pattern Recognition Jun 1998, pp. 498-503.
En la solicitud US2009202235A1 cambia la estrategia de búsqueda de foco 15 dependiendo de si la escena a capturar consiste en una escena interior (indoor) o exterior (outdoor). No se hace ninguna estimación de los parámetros de foco de la cámara ni de su comportamiento.
La patente US8339463B2 involucra una plataforma de calibración especialmente diseñada y está pensada para utilizarse con lentes (no con cámaras ya ensambladas). 20 El objetivo es calibrar la calidad de la imagen a lo largo del campo de visión y no tiene como objetivo facilitar o acelerar el proceso de enfoque.
Son conocidas también las estrategias descritas en las patentes US8366001B2 y US8416317B2 que implican la utilización de elementos activos para la estimación de la distancia del objeto de interés.
Es evidente la necesidad de un método de calibración que sea independiente
del conocimiento de los parámetros de la cámara, y tal es la finalidad de la propuesta de esta invención.
Exposición de la invención
En el método de calibración de esta invención se obtienen los parámetros del 30 conjunto cámara-lente implícitamente, permitiendo una precisa descripción de los límites de la profundidad de campo DOF (deptf of field) sin ningún conocimiento explícito de los parámetros de la cámara. A partir de la obtención de la constante de la cámara se aplica dicho parámetro para realizar un eficiente muestreo del rango de enfoque (focus sampling), en operaciones tales como autofoco y generación de
imágenes multi-focales. En particular el muestreo de enfoque minimiza el número de tomas necesarias para cubrir un cierto rango o intervalo de enfoque.
El método consiste en capturar una secuencia de imágenes de un patrón de calibración cambiando el foco de la cámara en cada imagen capturada mientras el patrón y la cámara se mantienen en una misma posición. A partir de las imágenes capturadas, es posible estimar una constante que caracteriza a la cámara y permite predecir el comportamiento del foco para la cámara que es objeto de la calibración. Con esta constante es posible restringir el espacio de búsqueda dentro del rango de enfoque reduciendo así el número de posiciones en las que es necesario hacer la búsqueda del foco ideal. De esta forma, es posible reducir el tiempo de autoenfoque en cualquiera de las técnicas anteriormente mencionadas (activas, pasivas o híbridas) sin conocimiento explícito de parámetros físicos de la cámara (tales como la longitud focal, la apertura, el tamaño del píxel, etc.) basados solo en el resultado de la calibración. Además del autoenfoque, el método de calibración propuesto también se puede explotar para la captura eficiente de secuencias de imágenes para la generación de imágenes de campo de profundidad extendido (extended depth-of-field images).
Breve descripción de los dibujos
Las anteriores y otras ventajas y características se comprenderán más plenamente a partir de la siguiente descripción detallada de un ejemplo de realización con referencia a los dibujos adjuntos, en los que:
la Fig. 1 es una vista en perspectiva del montaje para la calibración de la cámara, donde la referencia 1 indica una línea de separación, la 2 un patrón de calibración y la 3 una cámara;
la Fig. 2 es una secuencia de imágenes del patrón de calibración 2 con diferentes niveles de enfoque;
la Fig. 3 es una vista de los perfiles correspondientes a cada imagen de la secuencia;
la Fig. 4 es un gráfico sobre la constante de cámara se obtiene ajustando la curva r vs. u; y
la Fig. 5 es un gráfico sobre el método que consiste en limitar las posiciones focales (barras verticales) admisibles.
la Fig. 6 ilustra los principios del modelo de lente delgada (thin lens model), donde la referencia 4 indica una lente y la 5 un sensor.
Descripción detallada de un ejemplo de realización
Con el fin de desarrollar el método de calibración de esta invención se ha partido del modelo teórico de la lente delgada (thin lens model) que es el modelo teórico de 5 cámara más común, adaptándolo para que cumpla dos condiciones:
- la amplitud de desenfoque (blur width) no debe depender de parámetros internos geométricos (tales como el sensor de posición v); en su lugar debe de depender de parámetros externos medibles tales como la posición de foco u;
- el modelo tiene en cuenta implícitamente los efectos de los parámetros del
sistema (longitud focal y número f [f-number]) sin necesidad de conocer o estimarlos explícitamente, permitiendo así inmediatamente una eficiente calibración a lo largo de todo el rango de enfoque.
La Fig. 6 es una figura descriptiva de los elementos utilizados en el modelo de
lente delgada (thin lens). La medida de la radiancia de un punto P a una distancia particular ux se extiende por el efecto de la lente en un círculo de desenfoque (blurring cicle) de radio p. La máxima distancia de enfoque u para un círculo de desenfoque dado de radio p se puede computar como:
fv
u =-------
v f pN
La posición interna de la lente v es a menudo desconocida o difícil de determinar
en sistemas de lentes compuestas. En consecuencia es preferible tratar con la distancia entre el objeto y la posición de enfoque (ux - u). A partir de la ecuación anterior y despejando, resulta:
1_
Ñ
De acuerdo con la ecuación de la ecuación de lente delgada (thin lens equation)
se conoce que 1/f = 1A/ + 1/u. En consecuencia:
v = uf/{u - f) y v - f = f2/(u - /)
Reemplazando el valor de v en la ecuación anterior resulta:
/2 ( uT - u)
N ux(u - f)
Esta última ecuación p no depende de la posición...
Reivindicaciones:
1Método de calibración para mejorar la velocidad autoenfoque en cámaras digitales, caracterizado por comprender las siguientes etapas:
a) colocar un patrón de calibración a una distancia fija ux enfrente y de forma paralela a la cámara;
b) capturar una secuencia ordenada de imágenes enfocando la cámara a diferentes distancias alrededor de la posición del patrón, de manera que cada una de las imágenes capturadas, observada con un diferente nivel de enfoque, tiene asociada una posición de foco u determinada;
c) extraer de cada imagen del patrón de calibración un perfil de intensidad de los niveles de gris;
d) para cada perfil, l(x) obtenido se estima un valor del radio de desenfoque p ajustando la ecuación (1) al perfil correspondiente:
2 y 2p 2
(1)
en donde erf () es la función error:
o r* a
erf(x) = -7= / c l dt
V* Jo y
e) obtener el valor de la constante de la cámara ajustando la curva de los valores del radio de desenfoque p en función los valores de u, según la siguiente ecuación:
//«J
p=K------------
uxu (2)
2.- Método según la reivindicación 1, caracterizado porque dicho patrón de calibración comprende un plano con al menos dos regiones de alto contraste.
3.- Método según la reivindicación 2, caracterizado por que dichas dos regiones de alto
contraste están separadas por una línea recta.
4.- Método según la reivindicación 1, caracterizado por que dicho ajuste de la curva de los valores de p en función de u se realiza por un método de regresión no lineal.
5.- Método según la reivindicación 1, caracterizado por que para reducir el tiempo de búsqueda se propone limitar el número de posiciones de enfoque posibles a un conjunto determinado y por que el conjunto de posiciones permitidas U = uk I k= 0 1, 2, 3,.. se calcula de forma iterativa mediante las ecuaciones:
«*. i="*+A*
(3)
'^Prnax^k K-2p ^11*
(4)
correspondiendo la primera posición del conjunto, para k = 1 a la distancia mínima de
P
enfoque de la cámara y max es el radio de desenfoque máximo.
6.- Método según reivindicación 5 caracterizado porque comprende calcular el valor de Pmax mediante la siguiente equacion:
D <
max
81og(2)
(5)
7.- Método según reivindicación 5 caracterizado por que comprende introducir el valor de ^max manualmente por parte del usuario.
Patentes similares o relacionadas:
 Lámina metálica infalsificable, del 22 de Enero de 2016, de Constantia Teich GmbH: Procedimiento para la preparación de una lámina metálica infalsificable , que está estructurada en una zona parcial predefinida de su superficie, en el que esta […]
Lámina metálica infalsificable, del 22 de Enero de 2016, de Constantia Teich GmbH: Procedimiento para la preparación de una lámina metálica infalsificable , que está estructurada en una zona parcial predefinida de su superficie, en el que esta […]
 Sistema y método de sincronización de una primera copia en tiempo real, del 13 de Junio de 2012, de TECHNICOLOR INC.: Un sistema de corrección del color para uso en la corrección del toque de una escena de una películacinematográfica que comprende: una fuente de iluminación […]
Sistema y método de sincronización de una primera copia en tiempo real, del 13 de Junio de 2012, de TECHNICOLOR INC.: Un sistema de corrección del color para uso en la corrección del toque de una escena de una películacinematográfica que comprende: una fuente de iluminación […]
SISTEMA DE PROYECCION DE FILMS CON AVANCE CONMUTABLE., del 16 de Junio de 2005, de GOODHILL, DEAN K.: UN SISTEMA DE PROYECCION DE PELICULAS CON ELEMENTO DE TRACCION DESCENDENTE CONMUTABLE COMPRENDE UN SISTEMA DE TRANSPORTE DE LA PELICULA […]
FRENO DE RODILLO., del 1 de Mayo de 1995, de HAUTIO, HEINO: LA INVENCION SE REFIERE A UN FRENO DE CILINDRO QUE PUEDE SER PARTICULARMENTE UTIL PARA FRENAR UNA PELICULA Y / O UN TAMBOR DE PELICULA CUANDO SE SACA UNA PELICULA […]
SISTEMA DE TRANSPORTE Y ALMACENAMIENTO DE UNA CINTA SIN FIN., del 16 de Noviembre de 1990, de CHRISTIE ELECTRIC CORPORATION: UN APARATO Y METODO PARA ALMACENAMIENTO CONTINUO DE UNA CINTA DE MATERIAL EN UNA BOBINA, TAL COMO UNA PELICULA DE CINE DE LARGA DURACION, TENIENDO LA BOBINA EN SU INTERIOR […]
APARATO DE CAMARA FOTOGRAFICA PARA EL AVANCE DE UNA GUIA DE PELICULA A PARTIR DE UN CARTUCHO DE PELICULA., del 16 de Julio de 1990, de EASTMAN KODAK COMPANY: APARATO DE CAMARA FOTOGRAFICA PARA EL AVANCE DE UNA GUIA DE PELICULA A PARTIR DE UN CARTUCHO DE PELICULA, PARTICULARMENTE UNA CAMARA FOTOGRAFICA , […]
PROCEDIMIENTO PARA ENROLLAR Y DESENROLLAR UNA CINTA SIN FIN., del 16 de Diciembre de 1980, de BURTH,WILLI: DISPOSITIVO PARA ENROLLAR Y DESENROLLAR UNA CINTA MEDIANTE DISCOS CONCENTRICOS. CONSTA DE UN SOPORTE , FORMADO POR NUEVE DISCOS ANULARES CIRCULARES DISPUESTOS […]
 PANTALLA DE RETROPROYECCION Y PROCESO PARA SU PRODUCCION, del 16 de Febrero de 2008, de EVONIK ROHM GMBH: Pantalla de retroproyección que comprende al menos una capa de poli(metacrilato de metilo) dispersante de la luz que tiene un espesor comprendido en el intervalo de […]
PANTALLA DE RETROPROYECCION Y PROCESO PARA SU PRODUCCION, del 16 de Febrero de 2008, de EVONIK ROHM GMBH: Pantalla de retroproyección que comprende al menos una capa de poli(metacrilato de metilo) dispersante de la luz que tiene un espesor comprendido en el intervalo de […]