Brazo, elevador de personal y método para usar un elevador de personal.
Un brazo de un elevador de personal comprendiendo:
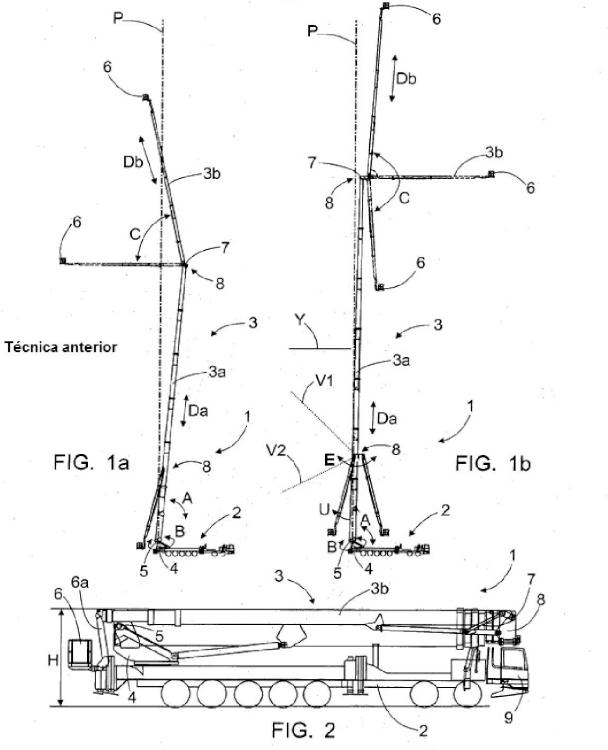
una primera parte del brazo (3a),
teniendo dispuesta una junta (5) que permite elevar y bajar la primera parte del brazo (3a);
una segunda parte del brazo (3b);
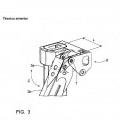
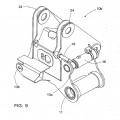
un miembro de conexión (8) en el que las partes del brazo (3a, 3b) están permanentemente conectadas entre sí;
al menos una junta (7) en la que la segunda parte del brazo (3b) está conectada al miembro de conexión (8), para que la segunda parte del brazo (3b) sea subida y bajada respecto a dicha junta (7);
al menos una jaula de personal (6) que está dispuesta en la parte superior de la segunda parte del brazo (3b);
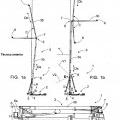
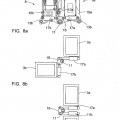
en donde el brazo (3) tiene una posición de transporte en la que las partes del brazo (3a, 3b) están dispuestas sustancialmente horizontales lado a lado y sus ejes están dispuestos en diferentes planos verticales; caracterizado por que
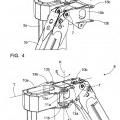
el miembro de conexión (8) comprende una primera parte de conexión (10a) y una segunda parte de conexión (10b), y la primera parte de conexión (10a) está fijada al extremo superior de la primera parte del brazo (3a) y la segunda parte de conexión (10b) está fijada al extremo de fondo de la segunda parte del brazo (3b);
entre las partes de conexión (10a, 10b), hay al menos un eje de giro (K) que es paralelo al eje de la primera parte del brazo (3a);
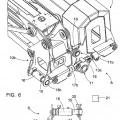
el miembro de conexión (8) comprende al menos un dispositivo de giro (17a, 17b) para mover la segunda parte de conexión (10b) respecto a la primera parte de conexión (10a) alrededor del eje de giro (K); y
el brazo (3) tiene una posición de giro en la que la segunda parte de conexión (10b) y la segunda parte del brazo (3b) fijadas entre sí son giradas a una posición en la que los ejes de las partes del brazo (3a, 3b) están sustancialmente en el mismo plano vertical (T);
el miembro de conexión comprende uno o más cilindros operados con medio a presión que sirven como el al menos un dispositivo de giro (17a, 17b), para que el movimiento lineal de el uno o más cilindros operados con medio a presión sea transformado en un movimiento de giro.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/FI2011/050332.
Solicitante: BRONTO SKYLIFT OY AB.
Nacionalidad solicitante: Finlandia.
Dirección: Teerivuorenkatu 28 33300 Tampere FINLANDIA.
Inventor/es: RAITMAA,KARI.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B66C23/42 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B66 ELEVACION; LEVANTAMIENTO; REMOLCADO. › B66C GRUAS Y PUENTES-GRUA; ELEMENTOS O DISPOSITIVOS DE TOMA DE CARGA PARA GRUAS, PUENTES GRUA, CABRESTANTES, CABRIAS O POLIPASTOS (mecanismos de enroscadura de cuerda, de cable o de cadena, dispositivos de frenado o de parada de su uso B66D; adaptados especialmente para los reactores nucleares G21). › B66C 23/00 Grúas que constan esencialmente de una viga, aguilón o una estructura triangular que actúan como brazo de palanca, montadas de forma que permitan movimientos de traslación o de orientación en planos verticales u horizontales, o bien una combinación de esos movimientos, p. ej. grúas de aguilón, derricks o grúas sobre torres (estructuras de torres que soportan la base B66C 5/00; adaptaciones de armazones que soportan las vías de rodadura B66C 6/00). › con aguilones de configuración regulable, p. ej. replegables.
- B66F11/04 B66 […] › B66F ELEVACION, LEVANTAMIENTO, REMOLQUE O EMPUJE, NO PREVISTOS EN OTRO LUGAR, p. ej. DISPOSITIVOS CUYA FUERZA DE LEVANTAMIENTO O EMPUJE SE APLICA DIRECTAMENTE SOBRE LA SUPERFICIE DE LA CARGA (montaje de islas artificiales sobre pilotes o soportes similares E02B 17/00; andamiajes combinados con aparatos de elevación E04G 1/22, E04G 3/28; dispositivos de elevación para encofrados deslizantes E04G 11/24; sobreelevación de edificios E04G 23/06; puntales o tirantes E04G 25/00; elevadores u otros dispositivos de elevación de escaleras E06C 7/12; puntales para minería E21D 15/00). › B66F 11/00 Dispositivos de elevación adaptados especialmente a fines especiales, no previstos en otro lugar (dispositivos sobre los vehículos, que toman contacto con el suelo para soportar, elevar o maniobrar el vehículo B60S 9/00). › para plataformas o cabinas móviles, p. ej. sobre vehículos, que permiten a los obreros ocupar cualquier posición conveniente para ejecutar los trabajos requeridos (plataformas para limpiar las ventanas A47L 3/02; dispositivos para rescatar personas de los edificios de construcción A62B 1/02; bajo el aspecto vehículo en lo que se refiere a vehículos utilitarios B60P 3/14; pasarelas para el mantenimiento de puentes E01D 19/10; andamiajes sobre basamentos extensibles E04G 1/22; plataformas susceptibles de ser elevadas o bajadas, utilizables sobre escalas E06C 7/16).
PDF original: ES-2552952_T3.pdf
Patentes similares o relacionadas:
Plataforma de trabajo con protección contra funcionamiento involuntario sostenido, del 27 de Mayo de 2020, de JLG INDUSTRIES,INC.: Una plataforma de trabajo combinada y un sistema para detectar obstáculos próximos, la plataforma de trabajo incluye un panel de […]
Una plataforma aérea autopropulsada, del 13 de Mayo de 2020, de Magni Telescopic Handlers S.r.l: Una plataforma aérea autopropulsada que incluye una plataforma de trabajo proporcionada en el extremo de un brazo operativo que está soportado […]
Dispositivo de protección contra caídas, del 6 de Mayo de 2020, de IVECO MAGIRUS AG: Dispositivo de protección contra caídas , que comprende un módulo con un adaptador para unir de manera extraíble el módulo en el extremo de un aparato […]
Sistema que comprende una plataforma de trabajo giratoria, del 1 de Abril de 2020, de Scanclimber Oy: Sistema que comprende: una estructura de mástil sustancialmente vertical; una estructura de armazón que está conectada a la estructura […]
 Método y sistema para un dispositivo de elevación de baja altura, del 25 de Marzo de 2020, de Xtreme Manufacturing, LLC: Un vehículo elevador de tijera que comprende:
un carro que comprende una pluralidad de ruedas dirigibles de manera independiente configuradas para acoplarse […]
Método y sistema para un dispositivo de elevación de baja altura, del 25 de Marzo de 2020, de Xtreme Manufacturing, LLC: Un vehículo elevador de tijera que comprende:
un carro que comprende una pluralidad de ruedas dirigibles de manera independiente configuradas para acoplarse […]
Un equipo de carga para máquinas de trabajo, del 18 de Marzo de 2020, de Manitou Italia S.r.l: Un equipo de carga destinado a ser utilizado con máquinas de trabajo como manipuladores telescópicos, plataformas de trabajo aéreo o similares, […]
Sistema de detección de obstáculos para una plataforma de trabajo aérea, del 19 de Febrero de 2020, de JLG INDUSTRIES,INC.: Un conjunto de plataforma que comprende: una plataforma de trabajo que incluye un piso de la plataforma y un riel de seguridad que se extiende […]
ESTRUCTURA DOTADA DE PLATAFORMA ELEVADORA PARA MONTAJE EN EL INTERIOR DEL HUECO DEL ASCENSOR, del 12 de Febrero de 2020, de INGENIERÍA SAMAT, S.L: 1. Estructura dotada de plataforma elevadora para montaje en el interior del hueco de ascensor caracterizado por comprender; - un suelo fijo dotado de unos medios […]