Brazo articulado telescópico robotizado.
Brazo articulado telescópico robotizado, de accionamiento electrohidráulico remoto pudiendo ser instalado en vehículos operacionales para poder llevar a cabo tareas de reconocimiento,
detección e identificación de cualquier tipo de artefacto peligroso, cuyo brazo articulado telescópico en sí queda montado en una torreta solidaria a un soporte base de acople rápido y cuyo soporte base comprende una central hidráulica, un motor de una bomba hidráulica y una electrónica de control, de forma que el brazo se define por un primer segmento articulado accionado por un primer cilindro hidráulico asociado al soporte base; un segundo segmento articulado telescópico accionado por un segundo cilindro hidráulico asociado al primer segmento articulado; un tercer segmento articulado telescópico accionado por un tercer cilindro hidráulico asociado al segundo segmento; una herramienta acoplada en el extremo libre del tercer segmento articulado dotada de un movimiento giratorio de 360º; unos sensores de posición, y, una toma de potencia del sistema eléctrico del vehículo en el que se instala.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201431720.
Solicitante: PROYTECSA SECURITY, S.L.
Nacionalidad solicitante: España.
Inventor/es: SALLEN ROSELLO,CESAR.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B25J18/02 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 18/00 Brazos. › extensibles.
- B25J5/00 B25J […] › Manipuladores montados sobre ruedas o sobre soportes móviles (B25J 1/00 tiene prioridad; manipuladores de control programado B25J 9/00).
- F41H11/16 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F41 ARMAS. › F41H BLINDAJE; TORRETAS ACORAZADAS; VEHICULOS BLINDADOS O ARMADOS; MEDIOS DE ATAQUE O DE DEFENSA, p. ej. ENMASCARAMIENTO, EN GENERAL. › F41H 11/00 Instalaciones de defensa; Mecanismos de defensa (aspectos constructivos, ver sección E, p. ej. E04H 9/04 ); Medios para limpiar o detectar minas terrestres. › Vehículos de limpieza de minas autopropulsados; Dispositivos de limpieza de minas que se unen a vehículos.
Fragmento de la descripción:
Brazo articulado telescópico robotizado.
OBJETO DE LA INVENCIÓN. 5
La siguiente invención, según se expresa en el enunciado de la presente memoria descriptiva, se refiere a un brazo articulado telescópico robotizado, cuyo brazo de accionamiento electrohidráulico puede ser instalado en vehículos especiales operacionales con objeto de poder llevar a cabo tareas de reconocimiento, detección e identificación de 10 cualquier tipo de artefacto peligroso, tales como cargas explosivas, pudiendo ser controlado desde el propio vehículo en el que se monta o por control remoto.
CAMPO DE APLICACIÓN.
En la presente memoria se describe un brazo articulado telescópico robotizado, el cual puede ser instalado en vehículos de transporte militar u operacionales de las fuerza armadas para llevar a cabo operaciones de limpieza de rutas y puntos sensibles para lo que tiene capacidad para detectar, reconocer, identificar, manipular y neutralizar cualquier tipo de artefacto peligroso y en especial artefactos explosivos. 20
ANTECEDENTES DE LA INVENCIÓN.
Convencionalmente, cuando hay que manipular artefactos explosivos o realizar operaciones de riesgo, más aún, cuando están en riesgo vidas humanas, se utilizan robots que son 25 manejados a distancia por medio de una consola de control.
De esta forma, entre los robots existentes para la manipulación de artefactos explosivos, podemos citar aquel que comprende un brazo articulado, según un único tramo, y sin posibilidad de girar según un plano horizontal, es decir, únicamente, tiene movimiento según 30 un plano vertical y limitado por su único tramo articulado.
Asimismo, este tipo de robots disponen de una serie de elementos de control, como son cámara de visión y sensores de proximidad.
Por otra parte, podemos considerar diferentes documentos de patente, tal como, el documento ES 2229938 en la que se presenta un robot autopropulsado con unos medios de desplazamiento definidos por dos trenes de ruedas laterales y dos motores, independientes, los cuales transmiten movimiento, cada uno de ellos, a un tren lateral de ruedas, de forma que todas las ruedas no presentan igual diámetro, presentando el mismo una menor 5 robustez al robot objeto del presente expediente.
Asimismo, podemos considerar el documento de patente ES 2241490 en el que se presenta un robot autopropulsado para manipulación de cargas explosivas, el cual dispone de unos medios de desplazamiento definidos por sendos trenes laterales de rodadura de oruga 10 graduables, presentando en su parte anterior una pala de arrastre, de longitud graduable, así como un brazo articulado con el primer tramo del brazo en forma de horquilla accionado por una pareja de cilindros y quedando rematado en una pinza.
En el documento ES 1073757 se describe un robot telecomandado para operaciones 15 especiales, el cual incorpora sobre el tren de rodadura una torreta a la que es solidario un brazo constituido por una serie de segmentos, disponiendo el brazo de, al menos, una cámara y, al menos, un arma disuasoria, de forma que el brazo está constituido por un primer y un segundo segmento unidos a través de un cuerpo intermedio que permite su acodamiento según planos paralelos, a cuyo segundo segmento se une un tercer segmento 20 telescópico que queda unido a un cuarto segmento en paralelogramo que, a su vez, se une a un quinto segmento y éste a un sexto segmento extremo portador de una pinza.
Igualmente, podemos considerar otros documentos como US 6113343; JP 20040060195 y JP 200326875, de forma que en el documento US 6113343 se describe un robot adaptado 25 para uso en ambientes hostiles y, especialmente, para manipular explosivos, que incorpora un mecanismo de torrecilla con un brazo manipulador con un primer brazo pivotable 110º y un segundo brazo pivotable 120º .
En el documento JP 20040060195 se describe una máquina que comprende un cuerpo 30 principal y un dispositivo de tracción dispuesto en cada lateral del cuerpo principal y al menos un dispositivo accionado por un fluido a presión para regular la anchura de tren de rodadura.
En el documento JP 200326875 se describe un vehículo con medios de desplazamiento 35
definidos por trenes laterales de rodadura de oruga en los que los laterales de rodadura de la oruga se desplazan por la acción de unos cilindros y son conducidos por largueros de montaje y guía.
DESCRIPCIÓN DE LA INVENCIÓN. 5
En la presente memoria se describe un brazo articulado telescópico robotizado, cuyo brazo de accionamiento electrohidráulico remoto puede ser instalado en vehículos operacionales con objeto de poder llevar a cabo tareas de reconocimiento, detección e identificación de cualquier tipo de artefacto peligroso, tales como cargas explosivas, de forma que el brazo 10 articulado telescópico robotizado comprende:
ï un soporte base de acople rápido a un vehículo con una torreta que monta el brazo, propiamente dicho, giratorio 360º y cuyo soporte base comprende una central hidráulica, un motor de una bomba hidráulica y una electrónica de control; 15
ï un primer segmento articulado accionado por un primer cilindro hidráulico asociado al soporte base;
ï un segundo segmento articulado telescópico accionado por un segundo cilindro hidráulico asociado al primer segmento articulado;
ï un tercer segmento articulado telescópico accionado por un tercer cilindro hidráulico 20 asociado al segundo segmento articulado telescópico;
ï al menos, una herramienta acoplada en el extremo libre del tercer segmento articulado telescópico dotada de un movimiento giratorio de 360º , así como otros elementos o útiles de trabajo;
ï unos sensores de posición asociados a cada segmento articulado conformante del 25 brazo, y;
ï una toma de potencia al sistema eléctrico del vehículo en el que se instala.
Así, se permite que cuando los operarios estén llevando a cabo los diferentes posibles trabajos puedan permanecer a una distancia de seguridad de hasta seis metros. 30
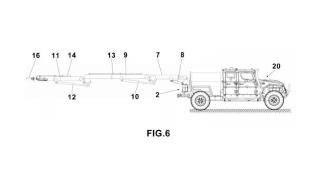
Por otra parte, los dos segmentos articulados telescópicos conformantes del brazo quedan en un plano vertical paralelo al plano vertical del primer segmento articulado permitiendo su plegado y quedando perfectamente recogido sin exceder los gálibos del vehículo y sin interferir en ningún sistema del mismo. 35
Además, el segundo segmento articulado telescópico es accionado, longitudinalmente, por un cuarto cilindro hidráulico para graduar su longitud, en tanto que el tercer segmento articulado telescópico es accionado, longitudinalmente, por un quinto cilindro hidráulico, igualmente, para graduar su longitud, permitiendo adaptar la longitud de los mismos a las 5 necesidades de cada momento.
El sistema de control y función del brazo articulado telescópico robotizado puede tener almacenadas posiciones predeterminadas del brazo, permitiendo un plegado/desplegado completamente automático en un mínimo tiempo. 10
La herramienta acoplada en el extremo libre del tercer segmento articulado telescópico se define por una pinza giratoria 360º , mediante la que se podrán manipular los diferentes objetos.
Asimismo, la herramienta acoplada en el extremo libre del tercer segmento articulado telescópico se puede definir por una garra para escarbar giratoria 360º .
Igualmente, el útil acoplado en el extremo libre del tercer segmento articulado telescópico se puede definir por un detector de metales. 20
El útil acoplado en el extremo libre del tercer segmento articulado telescópico se puede definir por un sistema de soplado de aire que permitirá apartar hojarasca, maleza, arena suelta o polvo en el punto de trabajo.
Estos útiles o herramientas se pueden acoplar de forma conjunta permitiendo ir realizando diferentes operaciones, y, así, en el momento que se pueda detectar una carga explosiva mediante la garra se podrá escarbar a su alrededor y con el sistema de soplado se podrá limpiar los alrededores de la misma, con objeto de poder tener una perfecta visión de la misma para su manipulación. 30
Para complementar la descripción que seguidamente se va a realizar, y con objeto de ayudar a una mejor comprensión de las características de la invención, se acompaña a la presente memoria descriptiva, de un juego de planos, en cuyas figuras de forma ilustrativa y no limitativa, se representan los detalles más característicos de la invención. 35
BREVE DESCRIPCIÓN DE LOS DISEÑOS.
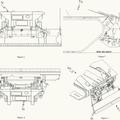
Figura 1. Muestra una primera vista en alzado del brazo conformado por tres segmentos articulados, siendo dos de ellos telescópicos, con el soporte base de acople rápido a un 5 vehículo y pudiendo observar como en su extremo...
Reivindicaciones:
1ª. BRAZO ARTICULADO TELESCÓPICO ROBOTIZADO, cuyo brazo, conformado por una serie de segmentos articulados, de accionamiento electrohidráulico remoto puede ser instalado en vehículos operacionales con objeto de poder llevar a cabo tareas de 5 reconocimiento, detección e identificación de cualquier tipo de artefacto peligroso, tales como cargas explosivas, caracterizado por que el brazo articulado telescópico robotizado (1) comprende:
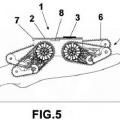
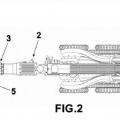
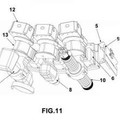
ï un soporte base (2) de acople rápido a un vehículo operacional (20) con una torreta 10 (3) que monta el brazo, propiamente dicho, giratorio 360º y cuyo soporte base (2) comprende una central hidráulica (4) , un motor (5) de una bomba hidráulica y una electrónica de control y función (6) ;
ï un primer segmento articulado (7) accionado por un primer cilindro hidráulico (8) asociado al soporte base (2) ; 15
ï un segundo segmento articulado telescópico (9) accionado por un segundo cilindro hidráulico (10) asociado al primer segmento articulado (7) ;
ï un tercer segmento articulado telescópico (11) accionado por un tercer cilindro hidráulico (12) asociado al segundo segmento articulado telescópico (9) ;
ï al menos, una herramienta montada en el extremo libre del tercer segmento 20 articulado telescópico (11) dotada de un movimiento giratorio de 360º , así como otros elementos o útiles de trabajo;
ï unos sensores de posición asociados a la torreta (3) de montaje del brazo y a cada uno de sus segmento articulados, y;
ï una toma de potencia del sistema eléctrico del vehículo en el que se instala, 25
quedando el segundo y tercer segmentos articulados telescópicos (9 y 11) según un plano vertical, en tanto que el primer segmento articulado (7) queda en un plano vertical paralelo al de los segmentos articulados telescópicos (9 y11) permitiendo su plegado.
2ª. BRAZO ARTICULADO TELESCÓPICO ROBOTIZADO, según la 1ª reivindicación, caracterizado por que el segundo segmento articulado telescópico (9) es accionado, longitudinalmente, por un cuarto cilindro hidráulico (13) .
3ª. BRAZO ARTICULADO TELESCÓPICO ROBOTIZADO, según la 1ª reivindicación, 35
caracterizado por que el tercer segmento articulado telescópico (11) es accionado, longitudinalmente, por un quinto cilindro hidráulico (14) .
4ª. BRAZO ARTICULADO TELESCÓPICO ROBOTIZADO, según la 1ª reivindicación, caracterizado por que el sistema de control y función del brazo articulado telescópico 5 robotizado (1) puede tener almacenadas posiciones predeterminadas del brazo.
5ª. BRAZO ARTICULADO TELESCÓPICO ROBOTIZADO, según la 1ª reivindicación, caracterizado por que la herramienta acoplada en el extremo libre del tercer segmento articulado telescópico (11) se define por una pinza (15) , giratoria 360º . 10
6ª. BRAZO ARTICULADO TELESCÓPICO ROBOTIZADO, según la 1ª reivindicación, caracterizado por que la herramienta acoplada en el extremo libre del tercer segmento articulado telescópico (11) se define por una garra (16) para escarbar, giratoria 360º .
7ª. BRAZO ARTICULADO TELESCÓPICO ROBOTIZADO, según la 1ª reivindicación, caracterizado por que el útil acoplado en el extremo libre del tercer segmento articulado telescópico (11) se define por un detector de metales (17) .
8ª. BRAZO ARTICULADO TELESCÓPICO ROBOTIZADO, según la 1ª reivindicación, 20 caracterizado por que el útil acoplado en el extremo libre del tercer segmento articulado telescópico (11) se define por un sistema de soplado de aire (18) .
Patentes similares o relacionadas:
Diente de arranque replegable con garra de aplicación para un equipamiento de bulldozer, del 9 de Enero de 2019, de RHEINMETALL LANDSYSTEME GMBH: Diente de arranque o respectivamente dientes de arranque para accesorios tanto en vehículos militares de ruedas o de orugas como en dispositivos […]
 Un implemento de vehículo desmontable, del 3 de Octubre de 2018, de Pearson Engineering Limited: Un implemento desmontable para un vehículo, comprendiendo el implemento una disposición de montaje para montar en un vehículo, comprendiendo la disposición […]
Un implemento de vehículo desmontable, del 3 de Octubre de 2018, de Pearson Engineering Limited: Un implemento desmontable para un vehículo, comprendiendo el implemento una disposición de montaje para montar en un vehículo, comprendiendo la disposición […]
VEHÍCULO TERRESTRE NO TRIPULADO PARA LA DETECCIÓN Y GEO-LOCALIZACIÓN DE ARTEFACTOS SITUADOS EN SUPERFICIE O ENTERRADOS, del 5 de Diciembre de 2017, de Ebotlution Systems SL: Vehículo terrestre no tripulado para la detección y geo-localización de artefactos situados en superficie o enterrados. Vehículo terrestre para la detección y geo-localización […]
BRAZO ARTICULADO TELESCÓPICO ROBOTIZADO, del 26 de Mayo de 2016, de PROYTECSA SECURITY, S.L: Brazo articulado telescópico robotizado, de accionamiento electrohidráulico remoto pudiendo ser instalado en vehículos operacionales para poder llevar a cabo […]
SOPORTE PARA DISRRUPTOR ADAPTADO A UNA PINZA DE UN BRAZO ROBOTIZADO, del 26 de Mayo de 2016, de PROYTECSA SECURITY, S.L: Soporte para disrruptor adaptado a una pinza de un brazo robotizado, estando basado el disrruptor en un tubo o cañón en cuya recámara aloja un cartucho […]
 Robot para manipulación de artefactos sospechosos, del 17 de Septiembre de 2015, de PROYTECSA SECURITY, S.L: Robot para manipulación de artefactos sospechosos, siendo del tipo robots provistos de unos medios móviles de tracción, de especial aplicación, dadas sus reducidas […]
Robot para manipulación de artefactos sospechosos, del 17 de Septiembre de 2015, de PROYTECSA SECURITY, S.L: Robot para manipulación de artefactos sospechosos, siendo del tipo robots provistos de unos medios móviles de tracción, de especial aplicación, dadas sus reducidas […]
 SISTEMA ADAPTADO A UN ROBOT PARA MANIPULAR OBJETOS VOLUMINOSOS, del 5 de Agosto de 2015, de PROYTECSA SECURITY, S.L: Sistema adaptado a un robot para manipular objetos voluminosos, siendo del tipo de robots utilizados en operaciones de riesgo que disponen de un brazo articulado […]
SISTEMA ADAPTADO A UN ROBOT PARA MANIPULAR OBJETOS VOLUMINOSOS, del 5 de Agosto de 2015, de PROYTECSA SECURITY, S.L: Sistema adaptado a un robot para manipular objetos voluminosos, siendo del tipo de robots utilizados en operaciones de riesgo que disponen de un brazo articulado […]
 ROBOT CON SOPORTE PORTA HERRAMIENTAS, del 16 de Junio de 2015, de PROYTECSA SECURITY, S.L: Robot con soporte portaherramientas, siendo del tipo de robots utilizados en la manipulación de artefactos sospechosos, los cuales disponen de un brazo […]
ROBOT CON SOPORTE PORTA HERRAMIENTAS, del 16 de Junio de 2015, de PROYTECSA SECURITY, S.L: Robot con soporte portaherramientas, siendo del tipo de robots utilizados en la manipulación de artefactos sospechosos, los cuales disponen de un brazo […]