Brazo de agarre para recipientes y procedimiento para la producción de un brazo de agarre de este tipo.
Brazo (2) de agarre para un dispositivo para agarrar, sujetar y guiar recipientes en particular de tipo botella,
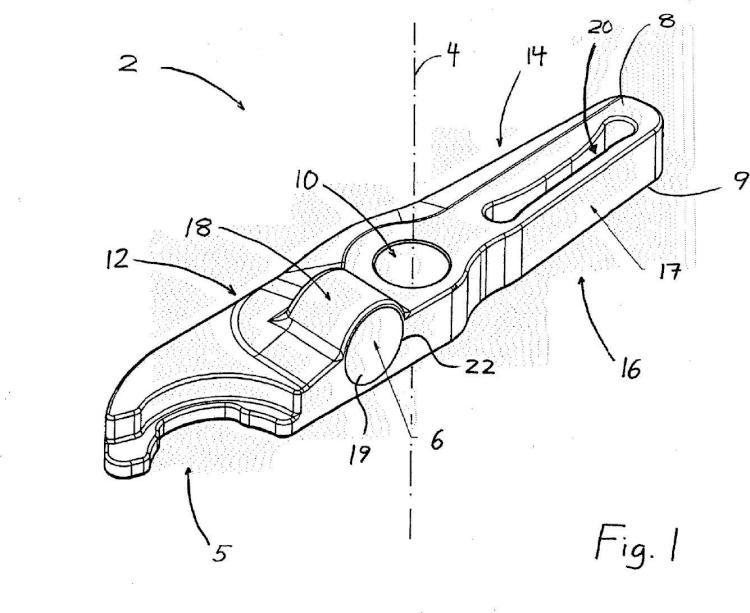
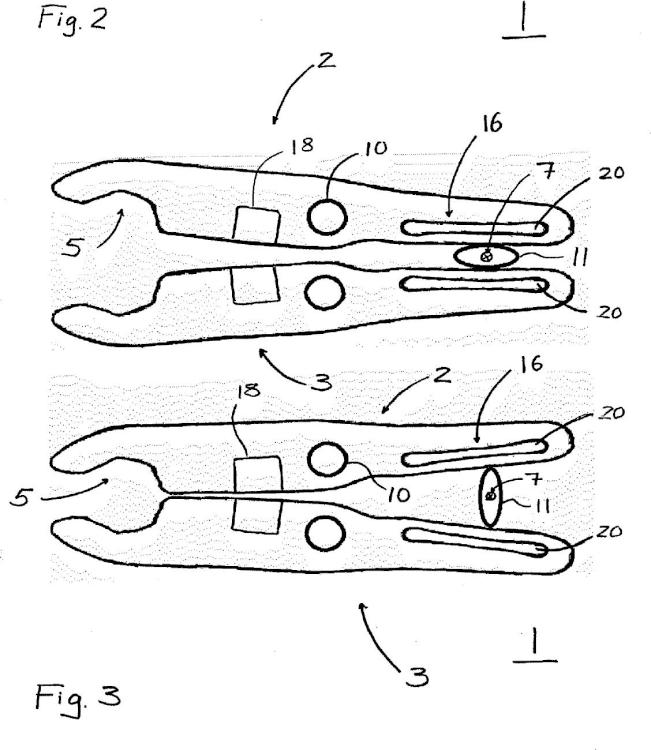
que para mover una sección (5) de agarre del brazo (2) de agarre de una posición de apertura a una posición de agarre presenta una leva (11) de control montada de manera giratoria, con una perforación (10) para alojar un perno de cojinete para fijar de manera pivotante el brazo (2) de agarre en el dispositivo, con un alojamiento (18) para un medio (6) de apertura para mover la sección (5) de agarre del brazo (2) de agarre de la posición de agarre a la posición de apertura, y con un medio (16) elástico para amortiguar y compensar la desviación y/o fuerza ejercida por la leva (11) de control sobre el brazo (2) de agarre, caracterizado porque el medio (16) elástico presenta un segmento (17) elástico formado de manera integrada en una sección (14) trasera del cuerpo de brazo de agarre, presentando la sección (14) trasera una entalladura (20) como espacio de resorte para el segmento (17) elástico y formando una delimitación de material de la entalladura (20) en su lado orientado hacia la leva de control el segmento (17) elástico, cuyo grosor de material y propiedad de material posibilita la amortiguación y compensación de la desviación y/o fuerza ejercida por la leva de control sobre el brazo de agarre.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E13155971.
Solicitante: TYROLON-SCHULNIG GMBH.
Nacionalidad solicitante: Austria.
Dirección: AM ROSSBERG 1 6395 HOCHFILZEN AUSTRIA.
Inventor/es: SCHULNIG,ELMAR LUDWIG.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B65G47/86 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › B65G 47/00 Dispositivos para manipular objetos o materiales asociados con los transportadores; Métodos de empleo de los dispositivos. › siendo pinzas los elementos que enganchan a los objetos.
- B67C3/24 B […] › B67 APERTURA Y CIERRE DE BOTELLAS, TARROS O RECIPIENTES ANALOGOS; MANIPULACION DE LIQUIDOS. › B67C LLENADO CON LIQUIDOS O SEMILIQUIDOS, O VACIADO DE BOTELLAS, TARROS, BOTES, CUBAS, BARRILES O RECIPIENTES SIMILARES, NO PREVISTO EN OTRO LUGAR; EMBUDOS. › B67C 3/00 Embotellado de líquidos o semilíquidos; Llenado de tarros o botes con líquidos o semilíquidos utilizando aparatos de embotellar o similares; Llenado de cubas o barriles con líquidos o semilíquidos. › Dispositivos para soportar o sujetar las botellas (dispositivos de transporte o de almacenado en general B65G).
PDF original: ES-2531199_T3.pdf
Fragmento de la descripción:
Brazo de agarre para recipientes y procedimiento para la producción de un brazo de agarre de este tipo.
La presente invención se refiere a un brazo de agarre y a un procedimiento para su producción para un dispositivo para agarrar, sujetar y guiar recipientes en particular de tipo botella, que para mover una sección de agarre del brazo de agarre de una posición de apertura a una posición de agarre presenta una leva de control montada de manera giratoria, con una perforación para alojar un perno de cojinete para fijar de manera pivotante el brazo de agarre en el dispositivo, con un alojamiento para un medio de apertura para mover la sección de agarre del brazo de agarre de la posición de agarre a la posición de apertura, y con un medio elástico para amortiguar y compensar la desviación y/o fuerza ejercida por la leva de control sobre el brazo de agarre.
Fundamentalmente, un brazo de agarre de este tipo se conoce por el estado de la técnica y se usa en el procesamiento de recipientes mediante la técnica de cadena continua. Por el término "recipiente" deben entenderse a continuación, en particular, pero no exclusivamente, recipientes de tipo botella, es decir, por ejemplo botellas de bebida de vidrio o plástico. En particular durante su limpieza, llenado o cierre, un dispositivo de agarre con al menos un par de brazos de agarre agarra los recipientes en una estación de entrada y los transporta a la siguiente estación en el proceso. Un dispositivo de este tipo se da a conocer, por ejemplo, en la solicitud de patente europea EP 1 851 146 A1. El dispositivo de agarre descrito en la misma, denominado allí "elemento de agarre de tipo pinza", está previsto para un sistema de transporte de recipientes, presentando el dispositivo de agarre dos brazos de agarre y pudiendo cambiar entre una posición de agarre y una posición de apertura. Para el proceso de liberación o apertura del dispositivo de agarre, es decir para el cambio de la posición de agarre a la posición de apertura de los brazos de agarre, se precisa un medio de apertura, por ejemplo en forma de resorte helicoidal o de par de imanes que se repelen, que ejerce una fuerza sobre los dos brazos de agarre y de ese modo abre el dispositivo de agarre. Los brazos de agarre presentan normalmente una posición inicial predefinida, a la que retornan automáticamente cuando una unidad de control no ejerce ninguna fuerza sobre los mismos. Tal como se conoce también en general por el estado de la técnica, la unidad de control está configurada a este respecto como leva de control de acción mecánica, cuya fuerza y con ello en gran medida también la desviación de los brazos de agarre se compensa o amortigua mediante un medio elástico en forma de un resorte de lámina fijado en cada brazo de agarre. El medio elástico ayuda a los brazos de agarre a compensar las tolerancias de material de recipientes que van a agarrarse o a compensar las diferencias de la anchura de agarre provocadas por un recipiente que está inclinado y con ello posibilitar un agarre seguro y evitar que se produzcan daños en el recipiente.
Sin embargo, el funcionamiento de un dispositivo de agarre de este tipo en un entorno que no esté libre de polvo conlleva problemas de higiene, lo que resulta ser desventajoso en particular cuando se utiliza en campos sensibles a la higiene tales como el embotellado de bebidas, zumos o alimentos para bebés, dado que las piezas individuales descritas anteriormente de un brazo de agarre conocido por el estado de la técnica, en particular el resorte helicoidal y el resorte de lámina con sus respectivos medios de fijación, acumulan polvo y/u otra suciedad, con lo que pueden incrustarse gérmenes no deseados.
El documento EP 1 868 746 B1 describe una pinza para sujetar recipientes, en particular botellas, en máquinas de transporte y tratamiento de recipientes, con al menos dos brazos de pinza que son móviles relativamente entre sí. El brazo de pinza con brazo de agarre y contrabrazo está configurado en una pieza, estando configurado el brazo de agarre con estabilidad dimensional y el contrabrazo con elasticidad de forma.
La invención se basa en el objetivo de indicar un brazo de agarre que pueda sujetarse fácilmente de manera suficientemente libre de suciedad y gérmenes.
El objetivo planteado se soluciona, en un brazo de agarre mencionado al principio, porque el medio elástico presenta un segmento elástico formado de manera integrada en una sección trasera del cuerpo de brazo de agarre. Por tanto, el resorte de lámina independiente utilizado por lo general en brazos de agarre convencionales se suprime, con lo que puede conseguirse una forma constructiva de una sola pieza, esencialmente más higiénica, del brazo de agarre sin perforaciones transversales que atraigan la suciedad. Esto va acompañado de una reducción considerable de la propensión al mantenimiento y a la reparación, dado que el resorte de lámina convencional con su atornillado correspondiente como componente independiente ya no es necesario. Como resultado se reducen considerablemente las superficies de deposición para gérmenes y suciedad, como por ejemplo entrantes superficiales.
En una forma de realización adicional, en el brazo de agarre, el medio de apertura para mover la sección de agarre del brazo de agarre de la posición de agarre a la posición de apertura es un imán. A este respecto, el brazo de agarre presenta ventajosamente como alojamiento del imán, en una sección delantera entre la perforación y la sección de agarre, un orificio ciego en el que puede insertarse el imán durante el ensamblaje del brazo de agarre. Aunque por el estado de la técnica mencionado anteriormente se conocen brazos de agarre con imanes como medios de apertura, éstos sustituyen a los resortes helicoidales conocidos igualmente por el estado de la técnica. Sin embargo, la fijación de los imanes en los brazos de agarre conocidos es relativamente compleja y puede tener
lugar por medio de soldadura o atornillado. En el caso de la soldadura se genera calor, que debilita a su vez considerablemente la potencia del imán. Por otro lado, el atornillado atrae suciedad. En cambio, el orificio ciego debe dimensionarse de tal manera que sujete el imán de manera segura sin medios de fijación adicionales. Sin embargo, el orificio ciego también puede presentar un borde sobresaliente o una convexidad dispuesta en el lado interno del orificio ciego, que actúa conjuntamente con una muesca del imán, con lo que se bloquea el imán y se impide que se salga. Con respecto a los atornillados conocidos por el estado de la técnica, este perfeccionamiento ventajoso del brazo de agarre según la invención proporciona un remedio. Dado que en los dispositivos en cuestión siempre se utilizan un par de brazos de agarre según la invención, como pura formalidad se indica que, tal como se conoce suficientemente por el estado de la técnica, los polos opuestos de los imanes deben tener la misma polaridad para que ambos imanes también se repelan para abrir el par de brazos de agarre.
Preferiblemente, el imán está revestido con una capa de plástico. Al envolver el imán con una envuelta de plástico se reduce considerablemente o incluso se evita la abrasión y/o la corrosión del imán y cualquier tipo de material abrasivo restante queda atrapado en la envuelta de plástico. De este modo, este perfeccionamiento de la invención contribuye en gran medida a la limpieza de todo el dispositivo. Además se protege el imán frente a golpes externos que podrían afectar a la fuerza magnética.
Por lo demás, el brazo de agarre puede estar fabricado ventajosamente de plástico en una pieza. Los brazos de agarre convencionales están compuestos por acero inoxidable y por tanto son relativamente caros, habiéndose mostrado además durante el funcionamiento de los dispositivos en cuestión que los brazos de agarre metálicos ocasionalmente se doblan, lo que por un lado es difícil de reconocer durante el funcionamiento del dispositivo y por otro lado puede conducir a daños en los recipientes que van a agarrarse y transportarse y/o en los brazos de agarre opuestos, que entregan o reciben el recipiente, y/u en otros accesorios. Por el contrario, si los brazos de agarre se fabrican de plástico, pueden producirse de manera muy económica con el procedimiento de moldeo por inyección como artículos desechables. Por lo demás, el plástico presenta para este uso mejores propiedades que el acero inoxidable, de modo que una solicitación excesiva del brazo de agarre no conduce a que se doble, sino a una rotura inmediata, lo que no conlleva ningún daño consiguiente en la botella y posibilita reconocer inmediatamente el brazo de agarre sometido a solicitación excesiva. El brazo de agarre puede sustituirse entonces muy rápidamente y de manera... [Seguir leyendo]
Reivindicaciones:
1Brazo (2) de agarre para un dispositivo para agarrar, sujetar y guiar recipientes en particular de tipo botella, que para mover una sección (5) de agarre del brazo (2) de agarre de una posición de apertura a una posición de agarre presenta una leva (11) de control montada de manera giratoria, con una perforación (10) para alojar un perno de cojinete para fijar de manera pivotante el brazo (2) de agarre en el dispositivo, con un alojamiento (18) para un medio (6) de apertura para mover la sección (5) de agarre del brazo (2) de agarre de la posición de agarre a la posición de apertura, y con un medio (16) elástico para amortiguar y compensar la desviación y/o fuerza ejercida por la leva (11) de control sobre el brazo (2) de agarre, caracterizado porque el medio (16) elástico presenta un segmento (17) elástico formado de manera integrada en una sección (14) trasera del cuerpo de brazo de agarre, presentando la sección (14) trasera una entalladura (20) como espacio de resorte para el segmento (17) elástico y formando una delimitación de material de la entalladura (20) en su lado orientado hacia la leva de control el segmento (17) elástico, cuyo grosor de material y propiedad de material posibilita la amortiguación y compensación de la desviación y/o fuerza ejercida por la leva de control sobre el brazo de agarre.
2.- Brazo (2) de agarre según la reivindicación 1, en el que el medio (6) de apertura para mover la sección (5) de agarre del brazo (2) de agarre de la posición de agarre a la posición de apertura es un imán (19), caracterizado porque el brazo (2) de agarre presenta como alojamiento (18) para el imán (19), en una sección (12) delantera entre la perforación (10) y la sección (5) de agarre, un orificio (22) ciego en el que puede insertarse el imán (19) durante el ensamblaje del brazo (2) de agarre.
3.- Brazo (2) de agarre según la reivindicación 2, caracterizado porque el imán (19) está revestido con una capa de plástico.
4.- Brazo (2) de agarre según una de las reivindicaciones 1 a 3, caracterizado porque el brazo (2) de agarre está fabricado en una pieza a partir de plástico.
5.- Brazo de agarre según la reivindicación 4, caracterizado porque el plástico está compuesto por poli(éter éter cetona) reforzada con fibras.
6.- Brazo (2) de agarre según una de las reivindicaciones 1 a 5, caracterizado porque la sección (5) de agarre presenta un perfil escalonado y/o que se estrecha desde el lado (9) inferior hacia el lado (8) superior del brazo (2) de agarre.
7.- Procedimiento para la producción de un brazo (2) de agarre según una de las reivindicaciones anteriores, caracterizado porque en la sección (14) trasera del cuerpo de brazo de agarre se forma una entalladura (20) que discurre esencialmente en la dirección longitudinal del brazo (2) de agarre, cuya delimitación de material en su lado orientado hacia la leva (11) de control forma un segmento (17) elástico, cuyo grosor de material y propiedad de material posibilita una amortiguación y compensación de la desviación y/o fuerza ejercida por la leva (11) de control sobre el brazo (2) de agarre, mientras que la extensión transversal de la entalladura (20) delimitada por el segmento (17) elástico ofrece al segmento (17) elástico espacio para el recorrido de resorte necesario.
8.- Procedimiento para la producción de un brazo (2) de agarre según una de las reivindicaciones 1 a 7, caracterizado porque el brazo (2) de agarre se produce en una pieza con un procedimiento de moldeo por inyección a partir de plástico, formándose como alojamiento (18) del imán (19) en una sección (12) delantera entre la perforación (10) y la sección (5) de agarre un orificio (22) ciego, en el que se inserta el imán (19) para el acabado del brazo (2) de agarre.
9.- Procedimiento para la producción de un brazo (2) de agarre según la reivindicación 8, caracterizado porque el imán (19) se introduce a presión en el orificio (22) ciego.
Patentes similares o relacionadas:
Máquina para el llenado de botellas, latas y recipientes similares, del 1 de Julio de 2020, de 764944 Alberta Inc. Operating As Am Jade Co: Una máquina de llenado de recipientes, seleccionada de una máquina de llenado giratoria o una máquina de llenado en línea, que comprende unidades de […]
Sistema de movimiento de contenedores entre unidades operativas, del 19 de Febrero de 2020, de SMI S.P.A.: Un sistema de movimiento de contenedores hasta y desde una unidad de procesamiento de dichos contenedores, que comprende: - un carrusel rotativo en […]
Dispositivo de soporte y agarre, en particular para líneas de llenado y/o cierre de recipientes, del 15 de Mayo de 2019, de RONCHI MARIO S.P A.: Dispositivo para soportar y agarrar recipientes (1, 1a), que comprende: - una base que define una superficie superior para soportar un recipiente (1,1a); - […]
Brazo de agarre para recipientes, equipo de agarre y dispositivo de transporte, del 19 de Septiembre de 2018, de TYROLON-SCHULNIG GMBH: Equipo de agarre para agarrar, sujetar y conducir recipientes, especialmente en forma de botellas, con - al menos un par de brazos de […]
ELEMENTO DE SUJECIÓN DE BOTELLAS PARA MÁQUINAS DE EMBOTELLADO, del 28 de Febrero de 2018, de TORRES LOBATO, José Alberto: 1. Elemento de sujeción de botellas para máquinas de embotellado, caracterizado porque está realizado en su totalidad de material plástico. 2. Elemento de sujeción […]
Sistema para el transporte de envases inestables, del 6 de Julio de 2017, de FRANCODOLFINI Automatismos, S.L.U: Sistema para el transporte de envases inestables. La novedad de la invención se centra en el hecho de que en vez de utilizar una cinta de transporte […]
Dispositivo para cambio de formato en el envasado, del 10 de Noviembre de 2016, de ROVIMATICA S.L: 1. El dispositivo para cambio automático de formato en el envasado está caracterizado por el ajuste rápido automático de cámaras, iluminación y de las […]
APARATO Y MÉTODO DE LLENADO DE CONTENEDORES, del 20 de Febrero de 2012, de R. BARDI S.R.L.: Aparato para llenar contenedores que comprende un transportador central para desplazar en una dirección longitudinal una pluralidad de […]