Boya para detección de peces.
La invención se refiere a una boya para detectar peces que comprende un sónar (3) configurado para emitir y recibir señales eléctricas,
un transductor piezoeléctrico (2) configurado para generar y recoger ondas ultrasónicas, donde las ondas ultrasónicas son generadas por el transductor (2) de acuerdo con las señales eléctricas emitidas por el sónar (3) y donde las señales eléctricas son recibidas en el sónar (3) de acuerdo con las ondas ultrasónicas recogidas por el transductor (2). La boya comprende además un acelerómetro (1) configurado para medir el ángulo de inclinación de la boya en el momento de emisión y de recepción de las ondas ultrasónicas, y para validar las señales ultrasónicas recibidas, cuando la diferencia entre dichos ángulos es menor que un umbral.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201231568.
Solicitante: MARINE INSTRUMENTS, S.A.
Nacionalidad solicitante: España.
Inventor/es: PINO MARTINS,Francisco Manuel, LEMA BALEATO,Bruno.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A01K79/00 NECESIDADES CORRIENTES DE LA VIDA. › A01 AGRICULTURA; SILVICULTURA; CRIA; CAZA; CAPTURA; PESCA. › A01K CRÍA DE ANIMALES; AVICULTURA; APICULTURA; PISCICULTURA; PESCA; ANIMALES PARA CRIA O REPRODUCCIÓN, NO PREVISTOS EN OTRO LUGAR; NUEVAS VARIEDADES DE ANIMALES. › Otros procedimientos o sistemas de captura masiva de peces además de los cubiertos por los grupos A01K 69/00 - A01K 77/00.
- B63B22/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B63 BUQUES U OTRAS EMBARCACIONES FLOTANTES; SUS EQUIPOS. › B63B BUQUES U OTRAS EMBARCACIONES FLOTANTES; EQUIPAMIENTO PARA EMBARCACIONES (disposiciones relativas a la ventilación, calefacción, refrigeración o acondicionamiento de aire en los buques B63J 2/00; subestructuras flotantes como soportes de las dragas o máquinas par el movimiento de tierras E02F 9/06). › Boyas (medios para señalar el emplazamiento de objetos sumergidos B63C 7/26; boyas salvavidas, p. ej. en forma de corona B63C 9/08).
- G01S15/96 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 15/00 Sistemas que utilizan la reflexión o rerradiación de ondas acústicas, p. ej. sistemas de sonar. › para la localización de peces.
Fragmento de la descripción:
Boya para detección de peces.
Objeto La invención se refiere a una boya para detección bancos de peces, discriminación de especies y tamaños. Adicionalmente, puede suministrar otros datos de interés meteorológico tales como la altura de olas o la temperatura en la superficie del agua.
Antecedentes de la invención En la pesca industrial de atún y de otras especies pelágicas es de uso generalizado la pesca con FAD’s, (Fish Aggregating Devices) . Los FAD’s son elementos flotantes de origen natural o artificial para concentrar peces. Se ha observado que, después de un tiempo en el agua, generan un ecosistema que favorece que los bancos de peces (especialmente túnidos) se mantengan debajo a ciertas horas del día.
La patente FR 2674338 describe una radio-boya con GPS, que informa sobre la posición del objeto al capitán del barco de pesca.
La patente ES2212920 divulga también una radio-boya con GPS equipada con sonar para localización de pesca.
La patente US 5377163 muestra cómo se aplican métodos acústicos de banda ancha para detectar vida marina. Sin embargo no se considera la influencia del escoramiento en el proceso de emisión y recepción.
En general, las boyas presentes en el mercado utilizan una tecnología hidroacústica de una sola frecuencia, con resoluciones capaces de obtener datos para que los pescadores puedan saber sí hay peces debajo. Habitualmente, emplean sónars con una sola frecuencia 50kHz, 180kHz o 190, 5 kHz y presentan ángulos de haz de 40º, entre 20150 metros de rango de profundidad y una resolución de entre 3-11, 2 metros. Esta tecnología no permite sin embargo discernir tamaños y especies con precisión. Además no contemplan la influencia del movimiento durante las mediciones realizadas.
Descripción de la invención La invención se refiera a una boya para detectar peces. Para ello incorpora un sónar para emitir y recibir señales ultrasónicas cuyo funcionamiento está acoplado con un acelerómetro que permite entre otras cosas, medir la posición angular de la boya entre el momento que se transmite el pulso ultrasónico y el momento en el que se recibe el eco. Esto es importante para validar o invalidar medidas realizadas con mucho movimiento.
La boya para detectar peces comprende un sónar para emitir y recibir señales eléctricas, un transductor piezoeléctrico para generar y recoger ondas ultrasónicas, donde las ondas ultrasónicas son generadas por el transductor de acuerdo con las señales eléctricas emitidas por el sónar y donde las señales eléctricas son recibidas en el sónar de acuerdo con las ondas ultrasónicas recogidas por el transductor. La boya comprende además un acelerómetro para medir el ángulo de inclinación de la boya en el momento de emisión y de recepción de las ondas ultrasónicas, y para validar las señales ultrasónicas recibidas, cuando la diferencia entre dichos ángulos es menor que un umbral.
Opcionalmente, el transductor puede generar ondas ultrasónicas de una pluralidad de frecuencias diferentes.
Opcionalmente, las ondas ultrasónicas pueden ser generadas consecutivamente, secuencialmente o simultáneamente.
Opcionalmente, la boya comprende además un convertidor analógico/digital controlado por un procesador para tratar digitalmente la señal ultrasónica.
Opcionalmente, el acelerómetro puede además medir la velocidad angular de la boya y el procesador se acopla con el acelerómetro para que las ondas ultrasónicas sean generadas en función de la velocidad angular de la boya.
Opcionalmente, el acelerómetro puede además para medir la altura de las olas.
Opcionalmente, se puede incluir unos medios de comunicación para enviar información sobre las ondas ultrasónicas reflejadas.
Opcionalmente, los medios de comunicación además pueden recibir comandos para el control del procesador.
Opcionalmente, la boya puede incluir un dispositivo de geo-localización de la boya.
Opcionalmente, la boya puede incluir un sensor de temperatura para medir la temperatura superficial del agua.
Opcionalmente, la boya puede incluir un compás magnético o un giroscopio para registrar las rotaciones.
Opcionalmente, la boya puede incluir una memoria para almacenar datos sobre las señales procesadas y los valores medidos.
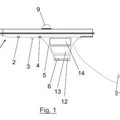
Figuras La figura 1 muestra tres regiones correspondientes a las zonas de detección de cada una de las tres frecuencias empleadas. Cuanto mayor la frecuencia empleada, menor es la zona que cubre y mayor la directividad.
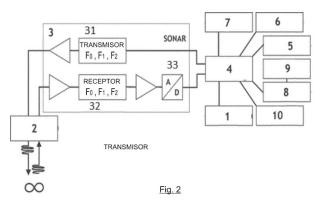
La figura 2 muestra un diagrama de bloques con los componentes principales.
La figura 3 muestra una sección de la boya de forma esquemática.
La figura 4 muestra tres gráficas 4A – 4C correspondientes con los tres modos de transmisión: consecutiva, secuencial y simultánea.
Descripción detallada de un modo de realización Con referencia a las figuras se explica un ejemplo de realización que no debe considerarse con carácter limitativo.
La figura 2 ilustra los bloques que se pueden distinguir en una realización de la invención.
Un sónar 3 activo multifrecuencia que incluye un emisor 31 y un receptor de señales 32 ultrasónicas y además de un convertidor A/D 33. El sónar 3 está conectado con un transceptor piezoeléctrico 2 capaz de generar señales ultrasónicas de diferentes frecuencias. El emisor 31 se encarga de generar un tren de pulsos (“ping”) de una frecuencia determinada y de alta tensión para excitar el transductor 2. El receptor 32 se encarga de amplificar y filtrar las débiles señales recibidas para finalmente convertirlas en el convertidor A/D 33 para que un procesador 4 pueda realizar un tratamiento digital de señal.
El transductor piezoeléctrico 2 convierte la energía eléctrica en mecánica y vice-versa. Le caracteriza la frecuencia de resonancia y el ángulo de apertura. El propuesto tiene una geometría de prisma rectangular con diferentes dimensiones ancho-alto-largo que dan lugar a tres frecuencias de resonancia diferentes. En la figura 1 se muestra por ejemplo: 50 kHz, 120 kHz y 200 kHz con diagramas de directividad cuyos ángulos apertura son de 42º@50kHz, 17º@120 kHz y 10º@200kHz. Pruebas realizadas indican que generalmente una variación de la inclinación de 10º en 200ms cuando se está enviando el ping en 200 kHz impide recibir señal ultrasónica de los ecos a 150m porque la señal ultrasónica recibida incide en el transductor con un ángulo fuera del rango de sensibilidad.
Se incluye en la boya una memoria 5 para almacenar los datos obtenidos datos de las detecciones para su posterior recuperación y/o envío. Preferentemente, se guardan los valores de inclinación de cada “ping” y la velocidad angular. Adicionalmente se pueden guardar otros datos de mediciones, localización, etc.
El procesador 4 sirve para controlar el momento de emisión de las ondas ultrasónicas en función de, entre otros, de los datos aportados por un acelerómetro 1. El procesador 4 se encarga también de realizar las tareas de control del sónar 3, enviar los mensajes al satélite y recibir los telecomandos del satélite, del tratamiento digital de la señal eléctrica recibida y de tomar las medidas de los diferentes sensores.
El acelerómetro 1 realiza una importante función ya que mide la escora y adicionalmente la velocidad angular de la boya entre otros parámetros. La información sobre la inclinación o escora en el momento del “ping” y la velocidad angular es utilizada para validar la detección. Se mide el ángulo antes de enviar el “ping”, y después de finalizar la recepción de la señal ultrasónica (200ms) . Si la variación de la inclinación entre emisión y recepción supera una cantidad dada (por ejemplo, 5º) , la medida no se considera válida y es repetida. De forma opcional, se puede integrar la aceleración entre un máximo y un mínimo para evaluar la altura de las olas que puede ser de interés meteorológico.
La boya puede incorporar un sistema de posicionamiento 6 como por ejemplo un GPS que permita geo-referenciar la boya.
La boya también puede incorporar unos medios de comunicación. Por ejemplo, un módem 7 satelitario que permita comunicarse vía radio o vía satélite para transmitir los resultados de las mediciones, la posición, etc. y que también permita recibir instrucciones para controlar su funcionamiento. Así se pueden transmitir, periódicamente o a petición, los datos de posición, temperatura, nivel de energía, actividad detectada por su sonda de pesca en las distintas frecuencias así como la inclinación de la boya en cada una de las detecciones ultrasónicas.
Opcionalmente, puede integrar...
Reivindicaciones:
1. Boya para detectar peces caracterizada por que comprende:
- un sónar (3) configurado para emitir y recibir señales eléctricas,
- un transductor piezoeléctrico (2) configurado para generar y recoger ondas ultrasónicas, donde las ondas ultrasónicas son generadas por el transductor (2) de acuerdo con las señales eléctricas emitidas por el sónar (3) y donde las señales eléctricas son recibidas en el sónar (3) de acuerdo con las ondas ultrasónicas recogidas por el transductor (2) , caracterizada por que comprende además:
- un acelerómetro (1) configurado para medir el ángulo de inclinación de la boya en el momento de emisión y de recepción de las ondas ultrasónicas, y para validar las señales ultrasónicas recibidas, cuando la diferencia entre dichos ángulos es menor que un umbral.
2. Boya según la reivindicación 1, caracterizada por que el transductor (2) está configurado para generar ondas ultrasónicas de una pluralidad de frecuencias diferentes.
3. Boya según la reivindicación 2, caracterizada por que las ondas ultrasónicas son generadas consecutivamente.
4. Boya según la reivindicación 2, caracterizada por que las ondas ultrasónicas son generadas secuencialmente.
5. Boya según la reivindicación 2, caracterizada por que las ondas ultrasónicas son generadas simultáneamente.
6. Boya según una cualquiera de las reivindicaciones anteriores, caracterizada por que comprende además un convertidor analógico/digital (33) controlado por un procesador (4) configurado para tratar digitalmente la señal ultrasónica.
7. Boya según la reivindicación 6, caracterizada por que el acelerómetro (1) está configurado además para medir la velocidad angular de la boya y por que el procesador (4) está acoplado con el acelerómetro para que las ondas ultrasónicas sean generadas en función de la velocidad angular de la boya.
8. Boya según la reivindicación 7, caracterizada por que por que el acelerómetro (1) está configurado además para medir la altura de las olas.
9. Boya según una cualquiera de las reivindicaciones anteriores, caracterizada por que comprende unos medios de comunicación (7) configurados para enviar información sobre las ondas ultrasónicas reflejadas.
10. Boya según la reivindicación 9, caracterizada por que los medios de comunicación (7) están configurados además para recibir comandos para el control del procesador (4) .
11. Boya según una cualquiera de las reivindicaciones anteriores, caracterizada por que comprende un dispositivo de geo-localización de la boya (6) .
12. Boya según una cualquiera de las reivindicaciones anteriores, caracterizada por que comprende un sensor de temperatura (10) para medir la temperatura superficial del agua.
13. Boya según una cualquiera de las reivindicaciones anteriores 6 a 11, caracterizada por que comprende además un compás magnético o un giroscopio configurado para medir las rotaciones.
14. Boya según una cualquiera de las reivindicaciones anteriores 6 a 12, caracterizada por que comprende una memoria (5) para almacenar datos sobre las señales procesadas y los valores medidos.
Patentes similares o relacionadas:
 Sistema de recolección submarina, del 31 de Julio de 2019, de Norwegian Innovation Technology Group AS: Un sistema de recolección submarina para la recolección de zooplancton u otros organismos marinos,
que comprende:
- un vehículo submarino , […]
Sistema de recolección submarina, del 31 de Julio de 2019, de Norwegian Innovation Technology Group AS: Un sistema de recolección submarina para la recolección de zooplancton u otros organismos marinos,
que comprende:
- un vehículo submarino , […]
VEHÍCULO DE SUPERFICIE NO TRIPULADO, del 7 de Mayo de 2019, de MARINE INSTRUMENTS, S.A: Vehículo de superficie no tripulado, caracterizado porque comprende: un casco flotante ; una vela submarina , con forma cilíndrica, […]
MECANISMO PROPULSOR DE ÁLABES DE BOMBA CENTRÍFUGA PARA TRANSPORTE DE LÍQUIDOS Y FAUNA VIVA, del 7 de Septiembre de 2018, de BUSTAMANTE SANDOVAL, Francisco Javier: La presente invención consiste en un mecanismo propulsor de álabes de bomba centrífuga para transporte de líquidos y fauna viva que tienen como novedad y actividad inventiva […]
MÉTODO Y SISTEMA DE COSECHA DE PECES VIVOS DE BAJO ESTRÉS, BIOSEGURO Y SIN SUFRIMIENTO ANIMAL. MEJORANDO LA TEXTURA Y CALIDAD DE LA CARNE, del 31 de Mayo de 2018, de SEEBACH ITURRA, Carolina Andrea: Método y sistema para la cosecha y matanza de peces en cultivos de jaulas flotantes, de manera humanitaria evitándoles el sufrimiento y estrés a los […]
CONSOLA DE INTERFAZ Y SISTEMA PARA GESTIONAR Y VISUALIZAR DATOS DE PESCA, del 10 de Agosto de 2016, de MARINE INSTRUMENTS, S.A: 1. Consola de interfaz para gestionar y visualizar datos de pesca, caracterizada porque comprende: - una carcasa ; - una pluralidad de mandos de control accesibles […]
Sistema de cosecha subacuática, del 22 de Junio de 2016, de Norwegian Innovation Technology Group AS: Un sistema de cosecha subacuático para cosechar zooplancton, comprendiendo: - un vehículo subacuático para ser descendido al mar y remolcado […]
Dispositivo y método atractor de escualos, del 14 de Enero de 2016, de TECNOLOGIA MARINA XIMO, S.L: Dispositivo y método atractor de escualos. El dispositivo comprende: - un módulo electromagnético para la generación de un campo electromagnético mediante […]
 Artefacto de búsqueda y agregación de peces, del 10 de Febrero de 2015, de MARINE INSTRUMENTS, S.A: La invención se refiere a un artefacto no tripulado, navegable autopropulsado para detectar y agregar bancos de peces, que de forma autónoma navega siguiendo una estrategia […]
Artefacto de búsqueda y agregación de peces, del 10 de Febrero de 2015, de MARINE INSTRUMENTS, S.A: La invención se refiere a un artefacto no tripulado, navegable autopropulsado para detectar y agregar bancos de peces, que de forma autónoma navega siguiendo una estrategia […]