Dispositivo autonivelado para el levantamiento GNSS de elementos lineales.
La invención describe un dispositivo autonivelado para el levantamiento GNSS de elementos lineales que facilita la toma de datos GNSS sobre rasgos lineales del terreno y que tiene capacidad de mantener nivelada la antena GNSS situada sobre un jalón a la vez que se desplaza sobre cualquier superficie del terreno,
para lo que se basa en el principio del péndulo.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201431920.
Solicitante: UNIVERSIDAD DE JAEN.
Nacionalidad solicitante: España.
Inventor/es: ARIZA LÓPEZ,Francisco Javier, GARCÍA BALBOA,José Luis, UREÑA CÁMARA,Manuel Antonio.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01C15/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01C MEDIDA DE DISTANCIAS, NIVELES O RUMBOS; TOPOGRAFIA; NAVEGACION; INSTRUMENTOS GIROSCOPICOS; FOTOGRAMETRIA O VIDEOGRAMETRIA (medida del nivel de líquidos G01F; radio navegación, determinación de la distancia o velocidad mediante la utilización de efectos de propagación, p. ej. efecto Doppler, tiempo de propagación, de ondas de radio, disposiciones análogas que utilicen otras ondas G01S). › Instrumentos o accesorios topográficos no previstos en los grupos G01C 1/00 - G01C 13/00.
- G01C7/04 G01C […] › G01C 7/00 Trazado de perfiles (mediante fotogrametría o videogrametría G01C 11/00). › que conllevan un vehículo que se desplaza a lo largo del perfil a ser trazado.
Fragmento de la descripción:
P201431920
Dispositivo autonivelado para el levantamiento GNSS de elementos lineales OBJETO DE LA INVENCIÓN
El campo de aplicación de la presente invención se enmarca dentro del sector técnico de la industria dedicada a la fabricación de accesorios para equipos e instrumental geodésico o topográfico y su aplicación práctica al sector geomático y topográfico en el levantamiento y control de obras de infraestructuras lineales (p.e. carreteras, vías de ferrocarril) y en el levantamiento y control de productos de datos cartográficos que contengan elementos lineales (p.e. catastros, parcelarios, callejeros, etc.) .
La invención se refiere a un dispositivo que facilita la toma de datos GNSS de manera lineal sobre el terreno, aportando como ventajas: a) la mejora de las precisiones posicionales alcanzadas, b) la eliminación del factor humano en la selección de los puntos tomados, c) un mayor rendimiento horario en el trabajo y d) permitir un trabajo menos molesto a los operarios.
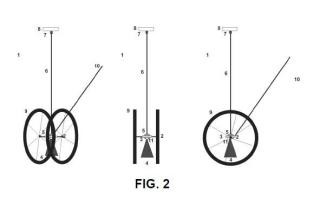
Más en particular, el objeto de la invención se centra en un dispositivo que, con capacidad para ser desplazado por cualquier superficie, aprovecha la fuerza de la gravedad para convertir el jalón donde se sitúa una antena GNSS en un péndulo, de tal manera que la antena siempre se encuentra nivelada y en disposición óptima para la captura de las señales GNSS. Además, gracias a unas ruedas o cadenas, la facilidad de desplazamiento permite una toma de datos en continuo con un seguimiento más objetivo de las trazas a levantar, con una mayor agilidad y con menor cansancio por parte del operario.
ANTECEDENTES DE LA INVENCIÓN
El levantamiento o captura de posiciones y fenómenos del mundo real tiene un gran interés para la creación de mapas y planos y, a partir de ellos, para los trabajos de arquitectura, ingeniería y planificación del territorio, entre otros.
Las técnicas de levantamiento han evolucionado mucho en las últimas décadas desde el levantamiento por métodos topográficos y fotogramétricos de carácter analógico hasta la aplicación de esos mismos métodos con sistemas totalmente automatizados. Uno de los 2 10
P201431920
grandes avances se debe a la aparición de los Sistemas Globales de Navegación por Satélite (GNSS) , dentro de los cuales destaca el Sistema de Posicionamiento Global (GPS) . Los sistemas GNSS permiten obtener posiciones exactas y precisas en toda la superficie de la Tierra siempre que existan unas buenas condiciones de observación de la constelación de satélites.
El posicionamiento GNSS puede realizarse con diversas técnicas tanto de trabajo en campo como de procesamiento. Las menores incertidumbres posicionales (menores al centímetro) se obtienen con el posicionamiento relativo, que combina dos o más equipos GNSS que observan a los mismos satélites de forma simultánea, empleando dos frecuencias y utilizando como observable la diferencia de fase. En el posicionamiento relativo se obtiene un conjunto vectores, uno entre cada pareja de equipos GNSS, cuyas componentes se conocen con una incertidumbre muy reducida. Independientemente de lo anterior, existen fuentes de incertidumbre relacionadas con la colocación de las antenas sensoras sobre los fenómenos del mundo real y que tienen importancia cuando se emplean las técnicas de posicionamiento relativo, que buscan la menor incertidumbre posible. En todos los casos se exige que la antena sensora esté nivelada (su plano en horizontal) , por dos motivos: para que se reciban de forma ininterrumpida las señales de la mayor cantidad de satélites posible y para tratar de ubicarla sobre la vertical del fenómeno del mundo real que es de interés. Para esto último se utilizan los dispositivos auxiliares como plataformas nivelantes con plomadas ópticas y niveles esféricos, jalones con niveles esféricos, etc.
Atendiendo al movimiento del equipo GNSS pueden distinguirse los métodos estáticos y los métodos cinemáticos.
Los métodos estáticos implican un lapso temporal durante el cual la antena sensora permanece en la misma posición realizando un conjunto de observaciones a los satélites. Utilizando un mínimo de dos receptores (posicionamiento relativo) , estos métodos suelen utilizarse cuando se desean obtener vectores con la menor incertidumbre posible, debido a la redundancia de información disponible. Es habitual montar la antena sensora sobre trípode y plataforma nivelante con nivel esférico y plomada óptica, que se coloca sobre la vertical del punto del terreno de interés, y un dispositivo para medir la altura de la antena sobre el terreno. También pueden utilizarse otras, como por ejemplo la de un bastón o jalón de longitud conocida que se mantiene vertical con nivel esférico acoplado y trípode de pinza o de forma manual. En todos estos casos la incertidumbre relativa a la colocación de la antena sensora es reducida y fácilmente controlable. 3
P201431920
Los métodos cinemáticos implican el movimiento continuo del sensor, en el que en todo momento se realizan observaciones a los satélites. Utilizando un mínimo de dos receptores (posicionamiento relativo) , uno estático y otro móvil se pueden obtener las menores incertidumbres en el conjunto de vectores entre el receptor estático y las distintas ubicaciones espaciales del receptor móvil. El receptor puede montarse en configuraciones muy diversas según la ubicación de la antena sensora sobre jalón o diferentes objetos móviles: sobre un ser humano (jalón en la mano o jalón montado en una mochila a la espalda) , vehículos terrestres, vehículos marinos, etc. Esto último puede provocar que, aunque el vector entre las antenas sensoras se conozca con una incertidumbre reducida, exista una incertidumbre importante que procede de la diferencia entre la posición de la antena sensora móvil y la posición del fenómeno del mundo real que se quiere levantar.
El levantamiento de fenómenos del mundo real de carácter lineal (p.e. perímetros de parcelas, vías de comunicación, etc.) implica obtener una traza formada por una serie de puntos discretos. Esta serie de puntos puede obtenerse aplicando métodos estáticos de paro/marcha (stop&go) sobre jalón, o aplicando métodos cinemáticos. El método de paro/marcha puede ofrecer una incertidumbre muy reducida, ya que permite colocar la antena sensora en jalón y sobre la vertical del fenómeno del mundo real a levantar, pero es lento si el elemento a lineal es de tal longitud que son numerosos los puntos a levantar, y se introduce un problema de arbitrariedad, por parte del operario, en la selección de los puntos que se capturan. Los métodos cinemáticos son más rápidos, y preferibles para elementos lineales de gran longitud y gran número de puntos a levantar. Si se necesita mantener una incertidumbre reducida es necesario utilizar métodos relativos y asegurar que durante el desplazamiento de la antena, ésta se ubique sobre la vertical del fenómeno a levantar. La antena puede sostenerse manualmente sobre esta vertical, pero esto es inviable por la incomodidad de sostener el peso de la antena a la vez que se mantiene el jalón vertical, con el problema añadido de que la altura de la antena sobre el suelo no sería constante. También se descarta recurrir al montaje sobre vehículos terrestres motorizados convencionales en tanto el propio guiado del vehículo introduce gran incertidumbre en la posición de la antena sobre el fenómeno a levantar. Lo ideal sería disponer de un dispositivo móvil sobre el cual colocar la antena y que permita controlar la posición del sensor respecto al fenómeno a levantar, el cual debería mantenerse nivelado en todo momento. Ya existen dispositivos específicos para el levantamiento de fenómenos de mundo real de carácter lineal. Estos dispositivos se derivan de la adaptación de una rueda para medir distancia u odómetro. Sobre el eje de la rueda se apoya un jalón sobre el que se monta la antena sensora GNSS. La verticalidad del jalón se consigue de forma manual con un bastón 4 10
P201431920
auxiliar, y observando un nivel esférico acoplado al jalón. Este procedimiento es incómodo, ya que el operario humano es el que de forma simultánea ha de impulsar la rueda, controlar la dirección para seguir la traza del elemento lineal, impedir la inclinación lateral de la rueda y controlar la verticalidad del jalón observando el nivel esférico y subiendo o bajando su mando. Además, toda desviación de la vertical derivada de la habilidad del operador redundará en una mayor incertidumbre en la captura.
La invención que se propone pretende facilitar el levantamiento continuo de elementos lineales mediante un dispositivo que se desliza por el terreno y que, a la vez, mantiene siempre nivelada la antena...
Reivindicaciones:
1. Dispositivo para el levantamiento GNSS de elementos lineales, caracterizado porque comprende:
-un sistema que permite mantener autonivelada una antena GNSS y -un sistema que le permite desplazarse sobre cualquier superficie.
2. Dispositivo de acuerdo con la reivindicación 1, donde la capacidad de autonivelación se consigue por cualquier construcción mecánica que ofrezca movimiento con dos grados de libertad y un conjunto de pesos para mantener el plano de una antena GNSS perpendicular a la fuerza del campo gravitatorio terrestre.
3. Dispositivo de acuerdo con la reivindicación 1, donde el medio de desplazamiento es una multiplicidad de ruedas o cadenas. 15
4. Dispositivo de acuerdo con cualquiera de las reivindicaciones anteriores, que además comprende un subsistema emisor láser que señala la posición del punto y plano de toma GNSS sobre el terreno para facilitar el correcto posicionamiento sobre marcas existentes en el terreno.
5. Dispositivo de acuerdo con cualquiera de las reivindicaciones anteriores, que además comprende medios de sujeción para que un operario pueda empujarlo y orientarlo sobre cualquier superficie.
6. Dispositivo de acuerdo con cualquiera de las reivindicaciones anteriores, que además comprende un subsistema de amortiguación para eliminar las posibles vibraciones.
Patentes similares o relacionadas:
APARATO PARA LA MEDIDA DE PARÁMETROS GEOMÉTRICOS DE UNA VÍA BASADO EN OBSERVACIONES GNSS, del 25 de Mayo de 2017, de UNIVERSIDAD DE EXTREMADURA: Aparato para la medida de parámetros geométricos de una vía basado en observaciones GNSS. La presente invención se refiere a un aparato […]
APARATO Y SISTEMA PARA LA MEDIDA DE PARÁMETROS GEOMÉTRICOS DE UNA VÍA, del 25 de Mayo de 2017, de UNIVERSIDAD DE EXTREMADURA: Aparato para la medida de parámetros geométricos de una vía. La presente invención se refiere a un aparato para la medida de parámetros geométricos de una vía. El aparato comprende: […]
 Creación de bases de datos de terreno optimizadas, del 5 de Junio de 2013, de THE BOEING COMPANY: Un sistema 300 para generar una base de datos 318 de terreno óptima, que comprende:
un módulo 306 de selección de región/región de prueba que selecciona […]
Creación de bases de datos de terreno optimizadas, del 5 de Junio de 2013, de THE BOEING COMPANY: Un sistema 300 para generar una base de datos 318 de terreno óptima, que comprende:
un módulo 306 de selección de región/región de prueba que selecciona […]
APARATO DE MEDIDA DE LA CAPACIDAD PORTANTE DEL FIRME DE UNA CARRETERA O SIMILAR., del 16 de Septiembre de 2005, de EUROCONSULT, S.A.: Aparato de medida de la capacidad portante del firme de una carretera o similar. El aparato se materializa en una cadena de considerable longitud, montada […]
PROCEDIMIENTO Y APARATO PARA MEDIR LA CAPACIDAD DE CARGA DE UNA PLATAFORMA., del 1 de Noviembre de 2003, de LABORATOIRE CENTRAL DES PONTS ET CHAUSSEES: Procedimiento para medir continuamente la rigidez de una plataforma de infraestructura de transporte y terrenos industriales, en el que se […]
APARATO DE MEDICION DE LA DEFLEXION DE UNA CALZADA, del 16 de Septiembre de 1998, de ETAT FRANCAIS REPRESENTE PAR LE LABORATOIRE CENTRAL DES PONTS ET CHAUSSEES: APARATO DE MEDICION DE LA DEFLEXION DE UNA CALZADA , ASOCIADO A UN VEHICULO QUE COMPRENDE UN CHASIS , RUEDAS DELANTERAS Y UN EJE TRASERO DE CARGA QUE […]
SISTEMA DE INSPECCION DE DETERIORO DE PAVIMENTO DE CARRETERA., del 16 de Enero de 2007, de THE ROADS AND TRAFFIC AUTHORITY OF NEW SOUTH WALES COMMONWEALTH SCIENTIFIC AND INDUSTRIAL RESEARCH ORGANISATION: Sistema para adquirir, procesar, almacenar, analizar y reportar datos referentes al estado de una carretera u otra superficie pavimentada en tiempo real; incluyendo […]
Nivel láser con soporte ajustable, del 22 de Julio de 2020, de KAPRO INDUSTRIES LTD.: Un nivel láser para ser colocado sobre una superficie de referencia horizontal, comprendiendo el nivel láser: (a) un cuerpo de nivel láser para proyectar […]