Automóvil con sensor de deformación capacitivo para la detección de colisiones.
Automóvil que comprende un componente metálico previsto en la parte frontal,
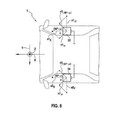
la parte trasera y/o lateralmente, en particular un parachoques, así como al menos un dispositivo sensor que comprende un sensor que funciona de forma capacitiva y un dispositivo de control asociado para la detección de colisiones, en el que el sensor (2) está dispuesto en un componente metálico (4) y está realizado como sensor superficial que se extiende a través de al menos la mitad de la anchura del componente metálico (4), en el que el dispositivo de control (10) puede determinar informaciones que resultan de una colisión con un objeto en base a la variación de la capacidad del sensor (2) causada por una deformación del sensor (2) provocada por la colisión, estando realizado el sensor (2) como condensador de placas, y en el que sobre el componente metálico, en particular el parachoques (4) que constituye un electrodo de condensador, es aplicada una capa de un dieléctrico (7) sobre la que es aplicado un segundo electrodo de condensador (9), caracterizado por que el segundo electrodo de condensador es subdividido en sectores de electrodo individuales (9) aislados uno de otro, estando cada sector de electrodo (9) conectado al dispositivo de control (10).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2012/001968.
Solicitante: AUDI AG.
Nacionalidad solicitante: Alemania.
Dirección: 85045 INGOLSTADT ALEMANIA.
Inventor/es: GEISS,MARKUS.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B60R21/0136 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60R VEHICULOS, EQUIPOS O PARTES DE VEHICULOS, NO PREVISTOS EN OTRO LUGAR (prevención, limitación o extinción de incendios especialmente adaptadas a los vehículos A62C 3/07). › B60R 21/00 Disposiciones o equipamientos sobre los vehículos para proteger a los ocupantes o a los peatones o para evitar ser dañados en caso de accidente o de otros riesgos de la circulación (cinturones o arneses de seguridad en los vehículos B60R 22/00; asientos construidos para proteger al ocupante de los efectos de las fuerzas de aceleración anormales, p. ej. asientos anticolisión o asientos de seguridad, B60N 2/42; disposiciones para absorber la energía en los volantes de dirección de vehículos B62D 1/11; disposiciones para absorber la energía en las columnas de dirección de vehículos B62D 1/19). › en respuesta a un contacto efectivo con un obstáculo.
PDF original: ES-2537888_T3.pdf
Fragmento de la descripción:
Automóvil con sensor de deformación capacitivo para la detección de colisiones La invención se refiere a un automóvil que comprende un componente metálico previsto en la parte frontal, la parte trasera y/o lateralmente, en particular un parachoques, así como al menos un dispositivo sensor que comprende un sensor que funciona de forma capacitiva y un dispositivo de control asociado para la detección de colisiones, en el que el sensor está dispuesto en un componente metálico y está realizado como sensor superficial que se extiende a través de al menos la mitad de la anchura del componente metálico, en el que el dispositivo de control puede determinar informaciones que resultan de una colisión con un objeto en base la variación de la capacidad del sensor provocada por una deformación del sensor debida a la colisión, en el que el sensor está realizado como condensador de placas, y sobre el componente metálico, en particular el parachoques que constituye un electrodo de condensador, está aplicada una capa de un dieléctrico, sobre la que es aplicado un segundo electrodo de condensador.
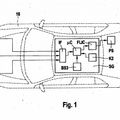
Los automóviles modernos comprenden diferentes medios de de retención como por ejemplo un airbag o tensores del cinturón que sirven para la protección de los ocupantes. En caso de colisión, estos medios de retención son controlados a través de dispositivos de control correspondientes, no siendo el control estático, sino que está configurado eventualmente también en función del proceso de colisión o la gravedad de la colisión. Debido a ello, en los automóviles modernos está prevista una posibilidad de detección de colisiones que posibilita detectar datos que pueden servir como base para un cálculo de la gravedad de colisión. Por lo general, se emplean para ello sensores de aceleración en la parte frontal del vehículo, pero también, véase por ejemplo el documento JP 2000326808 A, puede ser utilizado para la detección de datos un sensor de colisión que funciona de forma capacitiva, el cual cambia sus capacidades en función de la colisión que se produce realmente. La detección y evaluación de los datos debe hacerse muy rápidamente, por regla general se dispone para ello de un periodo de tiempo de 20-50 ms. A partir de los valores de medición recogidos el dispositivo de control asociado al dispositivo de detección de colisiones determina informaciones de la colisión, tales como por ejemplo la velocidad de colisión relativa o el solapamiento con el oponente en la colisión. Para ello, varios sensores que trabajan de forma puntual están distribuidos en el frente del vehículo.
Dado que los sensores incorporados trabajan solo de forma puntual, esto es, debido a su pequeño tamaño solo trabajan en una zona relativamente pequeña en relación con la superficie de colisión posible total, la velocidad de colisión relativa solo se puede determinar de forma relativamente grosera, lo que resulta de la interacción solo local del propio vehículo, ya sea por la parte frontal o la parte trasera, con diferentes oponentes de colisión, que además también poseen diferentes comportamientos de rigidez (por ejemplo, un muro contra el que choca el propio vehículo se comporta esencialmente de forma mucho más rígida que un vehículo que dispone de zonas de deformación propias) . Debido a la función de detección puntual de los sensores además es apenas posible una estimación del solapamiento con el oponente de la colisión. Debido al periodo de tiempo de decisión muy corto hasta el control o activación de los medios de retención es problemático un reconocimiento del lado impactado en caso de colisión.
Un automóvil del tipo mencionado al principio con las características del preámbulo de la reivindicación 1 es conocido por el documento JP 2000 177514 A.
La invención se propone, por tanto, el problema de indicar un automóvil que posibilite una mejor detección de colisiones y como resultado una determinación mejorada de las informaciones de colisión que sirven como base para el control de los medios de retención.
Para resolver el problema está previsto según la invención en un automóvil del tipo mencionado al principio que el segundo electrodo de condensador esté subdividido en sectores de electrodo individuales aislados uno de otro, estando cada sector de electrodo conectado al dispositivo de control.
El automóvil según la invención presenta de forma particularmente ventajosa un sensor superficial, es decir, un sensor que se extiende a través de una gran superficie, al menos a través de la mitad de la anchura del componente metálico en el que está dispuesto. Tal componente metálico puede ser, por ejemplo, un parachoques, pero también otro componente metálico de la estructura del vehículo, por ejemplo un parachoques de puerta lateral montado lateralmente o una estribera u otro larguero longitudinal o transversal de la estructura o carrocería del vehículo. Cada automóvil dispone por ejemplo de un parachoques, generalmente de acero o aluminio, que por lo general está dispuesto detrás de un revestimiento delantero y trasero. En este parachoques, por lo tanto, también igualmente detrás del revestimiento trasero se encuentra el sensor superficial que se extiende en este caso, al menos a través de la mitad de la anchura del parachoques, preferiblemente a través de al menos el 80% de la anchura del parachoques, y preferiblemente a través de toda la anchura del parachoques. Debido a la gran superficie del sensor, es posible definir con él una gran superficie de detección o una gran zona de detección, dentro de la cual una eventual colisión llega casi directamente al sensor, por lo que este es influenciado directamente, de modo que los datos captados por él representan por consiguiente, más o menos directamente una medida de la colisión. El resultado de ello es que las informaciones de la colisión, tales como por ejemplo la velocidad relativa y, en particular, también el solapamiento pueden ser detectadas con mucha precisión. Pues a diferencia del estado de la técnica,
donde se realiza una medición casi puntual, puesto que los sensores son solo sensores locales de formato pequeño, el sensor superficial ofrece un plano de detección de datos de gran superficie.
El sensor superficial funciona de forma capacitiva, de modo que varía su capacidad en caso de una deformación provocada por una colisión. Esta variación de la capacidad es detectada y evaluada por el dispositivo de control, en base a lo cual son determinados los datos correspondientes, que a continuación son proporcionados al control de los medios de retención.
Como ya se ha descrito, el sensor se extiende preferiblemente a través de al menos el 80% de la anchura del componente, esto es, por ejemplo la anchura del parachoques, preferiblemente a través de toda su anchura. Se extiende además también al menos a través de la mitad de la altura del componente metálico, esto es, por ejemplo del parachoques, preferiblemente a través de toda la altura del componente metálico. Cuanto mayor sea el sensor superficial, mayor será la superficie de detección de datos y más precisa la detección de datos.
El sensor propiamente dicho está realizado según un perfeccionamiento de la invención como condensador de placas, en el que el parachoques metálico, de aluminio o acero como se describió, constituye uno de los electrodos de condensador. Es decir, que un componente ya existente de fábrica es utilizado en una función adicional, aquí como electrodo de condensador. Para la realización del sensor, de acuerdo con un perfeccionamiento de la invención en el componente metálico, por ejemplo un parachoques, es aplicada una capa de un dieléctrico sobre la que es aplicado un segundo electrodo de condensador, con lo que el sensor que funciona de forma capacitiva es completado como tal. La estructura del sensor es pues muy simple, así como también puede ser diseñada en correspondencia al tamaño.
El dieléctrico propiamente dicho es preferiblemente un plástico, en particular un plástico espumado. Puede ser utilizado, por ejemplo, un termoplástico espumado o un elastómero espumado. En una realización concreta de la invención puede ser utilizado polipropileno expandido como plástico espumado. Es importante que el dieléctrico tenga por un lado suficientes propiedades dieléctricas, y por otro lado también una posibilidad de deformación correspondiente, de manera que se deforme en caso de colisión. De esta deformación resulta una variación de la distancia entre los dos electrodos de condensador en la zona en la que tiene lugar la colisión. De la variación de la distancia resulta, a su vez, una variación de la capacidad del sensor de condensador de placas. La capacidad puede a su vez ser determinada... [Seguir leyendo]
Reivindicaciones:
1. Automóvil que comprende un componente metálico previsto en la parte frontal, la parte trasera y/o lateralmente, en particular un parachoques, así como al menos un dispositivo sensor que comprende un sensor que funciona de forma capacitiva y un dispositivo de control asociado para la detección de colisiones, en el que el sensor (2) está dispuesto en un componente metálico (4) y está realizado como sensor superficial que se extiende a través de al menos la mitad de la anchura del componente metálico (4) , en el que el dispositivo de control (10) puede determinar informaciones que resultan de una colisión con un objeto en base a la variación de la capacidad del sensor (2) causada por una deformación del sensor (2) provocada por la colisión, estando realizado el sensor (2) como condensador de placas, y en el que sobre el componente metálico, en particular el parachoques (4) que constituye un electrodo de condensador, es aplicada una capa de un dieléctrico (7) sobre la que es aplicado un segundo electrodo de condensador (9) , caracterizado por que el segundo electrodo de condensador es subdividido en sectores de electrodo individuales (9) aislados uno de otro, estando cada sector de electrodo (9) conectado al dispositivo de control (10) .
2. Automóvil según la reivindicación 1, caracterizado por que el sensor (2) se extiende a través de al menos el 80 % de la anchura del componente metálico (4) , en particular a través de toda su anchura.
3. Automóvil según la reivindicación 1 o 2, caracterizado por que el sensor (2) se extiende a través de al menos la mitad de la altura, preferiblemente a través de toda la altura del componente metálico (4) .
4. Automóvil según una de las reivindicaciones anteriores, caracterizado por queque el componente metálico es un parachoques.
5. Automóvil según una de las reivindicaciones anteriores, caracterizado por que el dieléctrico (7) es un plástico, en particular un plástico espumado, preferentemente un elastómero.
6. Automóvil según la reivindicación 5, caracterizado por que el plástico espumado es polipropileno expandido.
7. Automóvil según una de las reivindicaciones anteriores, caracterizado por que el dieléctrico (7) posee un espesor en el intervalo de 1 -10 cm, en particular d.
3. 7 cm, preferentemente de 5 cm.
8. Automóvil según una de las reivindicaciones anteriores, caracterizado por que el segundo electrodo de condensador (9) está formado por una película metálica, una tela metálica eventualmente reforzada con fibra o una capa de metal depositada.
9. Automóvil según la reivindicación 8, caracterizado por que la película metálica, la tela metálica o la capa de metal es de aluminio o contiene aluminio.
10. Automóvil según la reivindicación 8 o 9, caracterizado por que la película metálica, la tela metálica o la capa de metal tiene un espesor de 10 - 1000 µm, en particular d.
100. 500 µm.
11. Automóvil según una de las reivindicaciones 8 a 10, caracterizado por quela película metálica, la tela metálica o la capa de metal depositada está dispuesta sobre un soporte (11) , en particular un soporte de plástico, o entre dos soportes (11) , en particular soportes de plástico.
12. Automóvil según la reivindicación 11, caracterizado por que un soporte (11) es una película de plástico, en particular de poliéster.
13. Automóvil según la reivindicación 12, caracterizado por que un soporte (11) tiene un espesor en el intervalo de 100 - 1000 m.
14. Automóvil según una de las reivindicaciones anteriores, caracterizado por que el segundo electrodo de condensador está dividido por varias ranuras (8) en los sectores de electrodo (9) .
Patentes similares o relacionadas:
Detección y respuesta a una explosión local a un vehículo, del 1 de Julio de 2019, de Advanced Blast & Ballistic Systems Limited: Vehículo , que comprende: una disposición de detectores que comprende una pluralidad de detectores (100; 100a-100d), distribuidos a lo largo de una longitud […]
EQUIPO DE SEGURIDAD PASIVA PARA PILOTOS DE VEHICULOS MOTORIZADOS SIN TECHO., del 21 de Mayo de 2019, de MAGURNO & LAUSUCH TECHNOLOGIES, S.L: Equipo de seguridad pasiva para vehículos motorizados sin techo, que comprende un asiento eyector en dicho vehículo y, al menos, un sensor […]
Procedimiento para hacer funcionar un sistema de protección de peatones, del 24 de Mayo de 2017, de AUDI AG: Procedimiento para hacer funcionar un sistema de protección de peatones para reducir la gravedad en accidentes en caso de colisiones frontales […]
Sensor de impacto con tubo flexible elásticamente deformable y sensor de presión y abertura radial en el tubo flexible para la sujeción, del 20 de Abril de 2016, de CONTINENTAL AUTOMOTIVE GMBH: Sensor de impacto integrado por un tubo flexible elásticamente deformable en caso de impacto , con un espacio hueco y por lo menos un sensor […]
 PROCEDIMIENTO Y DISPOSITIVO PARA ACCIONAR MEDIOS DE PROTECCIÓN DE PERSONAS PARA UN VEHÍCULO EN CASO DE UN IMPACTO LATERAL, del 29 de Mayo de 2013, de ROBERT BOSCH GMBH: La invención se refiere a un procedimiento y a un dispositivo para accionar medios de protección de personas para un vehículo en caso de un impacto lateral, […]
PROCEDIMIENTO Y DISPOSITIVO PARA ACCIONAR MEDIOS DE PROTECCIÓN DE PERSONAS PARA UN VEHÍCULO EN CASO DE UN IMPACTO LATERAL, del 29 de Mayo de 2013, de ROBERT BOSCH GMBH: La invención se refiere a un procedimiento y a un dispositivo para accionar medios de protección de personas para un vehículo en caso de un impacto lateral, […]
DISPOSITIVO PARA DETECTAR IMPACTOS, del 10 de Agosto de 2011, de ROBERT BOSCH GMBH: Dispositivo para detectar impactos con al menos un sensor de presión (1 a 5), en donde un procesador puede unirse al menos a un sensor de presión (1 a 5), de tal modo […]
 DISPOSITIVO Y PROCEDIMIENTO PARA LA ACTIVACIÓN DE UN MEDIO DE PROTECCIÓN DE PERSONAS, del 1 de Marzo de 2011, de ROBERT BOSCH GMBH: Dispositivo para la activación de medios de protección de personas (PS) con un circuito de evaluación (µC) que, en función de una primera señal de una […]
DISPOSITIVO Y PROCEDIMIENTO PARA LA ACTIVACIÓN DE UN MEDIO DE PROTECCIÓN DE PERSONAS, del 1 de Marzo de 2011, de ROBERT BOSCH GMBH: Dispositivo para la activación de medios de protección de personas (PS) con un circuito de evaluación (µC) que, en función de una primera señal de una […]
SENSOR DE ACCIDENTE Y MÉTODO PARA EL PROCESAMIENTO DE, AL MENOS, UNA SEÑAL DE MEDICIÓN, del 17 de Agosto de 2011, de ROBERT BOSCH GMBH: Sensor de accidente (S1) con - un elemento sensor (SE) para la deteccion de, al menos, una variable de medicion, y - una unidad logica (AS), caracterizada - por una primera […]