Un método para compensar la deriva de la sensibilidad de un sensor de campo magnético para la detección de un campo magnético BExt,
el sensor comprende por lo menos cuatro electrodos, el método comprende: una primera etapa en la que se utiliza un primer conjunto de dos electrodos para polarizar el sensor y se utiliza un segundo conjunto de dos electrodos para detectar una señal de salida del sensor de campo magnético; y una segunda etapa en la que se utiliza el segundo conjunto de dos electrodos para polarizar el sensor y se utiliza el primer conjunto de dos electrodos para detectar una señal de salida del sensor de campo magnético; sólo la segunda etapa se divide en por lo menos una primera sub-etapa y una segunda sub-etapa, un campo magnético de referencia (BCal) tiene unos primeros parámetros de campo magnético en la primera sub-etapa y unos segundos parámetros de campo magnético en la segunda sub-etapa, en el que tanto durante la primera etapa y una de entre la primera y la segunda sub-etapas de la segunda etapa el campo magnético de referencia (BCal) tiene una primera amplitud y una primera fase, que son sustancialmente iguales el método se caracteriza porque: durante otra de entre la primera o la segunda sub-etapas el campo magnético de referencia (BCal) tiene uno de entre a) una amplitud diferente a la primera amplitud y tiene la primera fase, b) una amplitud cero, o c) la primera amplitud y una fase opuesta a la primera fase; una señal de salida es detectada en la primera y la segunda sub-etapas; y una señal de salida es detectada dentro de la primera y la segunda sub-etapas
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E07075891.
G01R33/07FISICA. › G01METROLOGIA; ENSAYOS. › G01R MEDIDA DE VARIABLES ELECTRICAS; MEDIDA DE VARIABLES MAGNETICAS (indicación de la sintonización de circuitos resonantes H03J 3/12). › G01R 33/00 Dispositivos o aparatos para la medida de valores magnéticos. › dispositivos de efecto Hall.
Clasificación PCT:
G01R33/02G01R 33/00 […] › Medida de la dirección o de la intensidad de campos magnéticos o de flujos magnéticos (G01R 33/20 tiene prioridad).
G01R33/07G01R 33/00 […] › dispositivos de efecto Hall.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
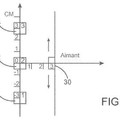
La presente invención propone hardware y métodos asociados para eliminar la desviación y la variación de la sensibilidad que afecta a los sensores magnéticos, por ejemplo, sensores integrados de efecto Hall. La invención también se puede aplicar a otros sensores magnéticos para los que se puede aislar un valor de desviación de un valor de salida mediante el uso de dos fases que se diferencian por el sentido o la amplitud de una señal de polarización. Antecedentes de la invención Un sensor Hall para la detección de campos magnéticos se integra ventajosamente en un sustrato de semiconductor. Dicho sensor es normalmente una región plana de un sustrato de semiconductor, normalmente una región cuadrada de dicho sustrato, también conocida como placa de Hall, que se implanta con impurezas dopantes y hace contacto por lo menos en cuatro puntos de la plaza, normalmente las esquinas de la plaza (véase la Fig. 1). Se utilizan dos electrodos diagonalmente opuestos para polarizar el sensor, es decir se obliga a una corriente lBias a través de la región plana dopada. Cuando un campo magnético Bext se aplica perpendicularmente a la región plana dopada, aparece una diferencia de potencial VH a través de la placa y se puede medir entre los dos electrodos restantes (los electrodos de detección): VH = S + BExt Vop donde BExt es el componente del campo magnético que es perpendicular a la placa, S es la sensibilidad de la placa y Vop es una desviación, es decir, un voltaje diferente de cero que se puede medir entre los dos electrodos de detección cuando BExt = 0. La sensibilidad S de la placa de Hall es proporcional a la corriente de polarización lBias. La sensibilidad S de la placa de Hall es generalmente una función de la temperatura, la magnitud de BExt, choques térmicos, el envejecimiento del material semiconductor del que está hecho el sustrato, etc... En "Sensor monolítico magnético de Hall que utiliza cancelación dinámica de desviación por cuadratura" Alberto Bilotti et al. describe la técnica más simple de cancelación dinámica de desviación. Utiliza una placa cuadrada individual con cuatro contactos cuando se generan los estados de cuadratura mediante la conexión periódica del voltaje de alimentación y la entrada del acondicionador de señal a los diferentes pares de contactos, como se muestra en la Fig. 2. Cada estado, que se llamará de ahora en adelante un primer y un segundo estado o un estado de 0 grados y un estado de 90 grados, se define por las señales de reloj y complementarias ck1 y , respectivamente. Suponiendo que BExt = 0 y un modelo de puente de Wheatstone ideal para la placa de Hall, los voltajes que aparecen en los contactos de salida son las desviaciones de placa Vop (0 grados) y Vop (90 grados), que son de magnitudes iguales, pero tienen polaridades opuestas (véase el gráfico inferior de la Fig. 2). Esto se puede verificar de forma muy simple de la siguiente manera. Supóngase un desequilibrio, por ejemplo debido a un patrón de estrés, se produce de tal manera que la región entre los contactos del lado izquierdo y los del lado superior a y b muestra una menor resistividad que el resto de la placa y que esta situación no cambia cuando cambian los estados. Luego, las desviaciones desarrollados en cada estado tienen la misma magnitud pero polaridades opuestas, ya que se produce el mismo desequilibrio en las ramas adyacentes de la red de puente equivalente (el terminal Hi será más positivo que el terminal Lo en el estado de 0 grados, pero más negativo en el estado de 90 grados). Para BExt 0, como las conexiones de alimentación y de salida giran en el mismo sentido, la contribución de BExt a V H mantiene sin cambios su polaridad, por lo que es invariable. Esta característica de la contribución de BExt a V H se deriva de la propiedad anti-rreciproca de una placa de Hall simétrica. Parece, por tanto, una forma sencilla de distinguir la desviación a partir de la señal útil y además cancelar la desviación mediante el condicionamiento adecuado de la señal. Aunque en la Fig. 2, se puede observar que la señal medida VH es casi constante y la señal de desviación Vop es una onda alterna cuadrada, las formas de onda se pueden intercambiar, si se desea, mediante el intercambio de los contactos de salida diagonalmente opuestos a y c durante la fase segunda o de 90 grados. Como una cancelación idealmente perfecta nunca es posible, en la práctica hay una desviación residual Vopr de placa definido como Vopr = |Vop(0 grados)| - |V op(90 grados)|, donde se han preferido los valores absolutos para enfatizar la inversiones de polaridad que ocurren durante el procesamiento adicional de las señales. Dependiendo del proceso de fabricación, la geometría de la placa de Hall y la orientación cristalográfica, y el estrés residual del paquete y la oblea, la desviación residual de la placa puede variar entre 50 a 500 V para una fuente de alimentación de 5V. En aras de la simplicidad y a menos que se especifique lo contrario, se asume que |Vop(0 grados)| = |Vop(90 grados)| = Vop. El voltaje de Hall medido a través de los electrodos de detección en el estado de 0 grados es: y en el estado de 90 grados: VH1 = S BExt + V op VH2 = S BExt Vop ES 2 367 932 T3 2 (Ec.1) (Ec.2) Con la suma de Ec. 1 y Ec. 2, se obtiene lo siguiente: VH1 + V H2 = 2 S BExt que es independiente del voltaje de desviación. Si bien la técnica de cancelación dinámica de desviación explicada anteriormente resuelve el problema de la desviación, no resuelve el problema de las variaciones de la sensibilidad. El sensibilidad S de cualquier sensor Hall integrado variará en función de la temperatura, en función del tiempo (envejecimiento del sustrato semiconductor en el que está integrado el sensor Hall, el envejecimiento del envase que protege el sustrato semiconductor), en función de la amplitud del campo magnético (que corresponde a una no linealidad del sensor). La dependencia de la temperatura, por ejemplo, puede compensarse mediante diferentes circuitos de compensación, basados en las mediciones de la sensibilidad a diferentes temperaturas. Algunos circuitos de compensación son dimensionados de una vez por todas. Si la dependencia de la temperatura de la sensibilidad varía por una u otra razón, esos circuitos de compensación no serán capaces de compensar adecuadamente las variaciones de temperatura. Para compensar las deficiencias de este tipo de circuitos cubiertos brevemente anteriormente Demierre et al. propone en "Activador magnético de referencia para la auto-calibración de una distribución muy pequeña de sensores de Hall", Sensores y Activadores A 97-98 (2002) pgs. 39-46, utilizar un campo magnético de referencia BCal bien determinado para calibrar el sensor Hall. Para diferenciar el campo magnético de referencia del campo magnético externo que se quiere medir, Demierre et al. utiliza una distribución de 4 sensores de Hall, cada sensor se asocia con una bobina. Cada bobina genera un campo magnético conocido. Por lo tanto, la separación del campo magnético externo y el campo magnético de referencia generado de las bobinas requiere varias bobinas y varios sensores de Hall. Esto no siempre es deseable si la potencia disponible para el funcionamiento del sensor es limitada y/o si el área de sustrato semiconductor disponible para integrar los sensores de Hall es limitada. En "Fuente de campo magnético con CMOS integrado utilizada como referencia en sensores de campo magnético sobre un sustrato común", publicado en IMTC 94 (Conferencia de tecnología en instrumentación y medición 1994, IMTC/94 Actas de la Conferencia, 10º aniversario, Tecnologías avanzadas en I & M., 1994, IEEE Fecha de publicación: 10-12 de mayo de 1994, en la página (s): 461-463 vol.2), Trontelj et al. también se basa en un campo magnético de referencia BCal generado por una bobina que rodea al sensor Hall para calibrar el sensor Hall y para compensar derivas de la sensibilidad. Para separar el campo magnético externo BExt del campo magnético de referencia BCal, el campo magnético de referencia se modula a una frecuencia predeterminada mayor que la señal de reloj que determina la fase de 0 grados y de 90 grados. Las contribuciones al voltaje de Hall de ambos campos se separan entonces con un filtro muy selectivo. Este filtro no siempre es fácil de realizar y, además, consume energía adicional y área de silicio. Sigue existiendo la necesidad de mejora. La solicitud de patente EP 1 637 898 describe un sensor de campo magnético adicional que comprende un generador de campo magnético de referencia, una célula de detección de campo magnético que incluye unos elementos de detección de efecto Hall y un circuito de procesamiento de señal conectado a la salida de la célula de detección de campo magnético. Unas cajas de distribución gestionan los cambios en las conexiones de los elementos... [Seguir leyendo]
Reivindicaciones:
1. Un método para compensar la deriva de la sensibilidad de un sensor de campo magnético para la detección de un campo magnético BExt, el sensor comprende por lo menos cuatro electrodos, el método comprende: una primera etapa en la que se utiliza un primer conjunto de dos electrodos para polarizar el sensor y se utiliza un segundo conjunto de dos electrodos para detectar una señal de salida del sensor de campo magnético; y una segunda etapa en la que se utiliza el segundo conjunto de dos electrodos para polarizar el sensor y se utiliza el primer conjunto de dos electrodos para detectar una señal de salida del sensor de campo magnético; sólo la segunda etapa se divide en por lo menos una primera sub-etapa y una segunda sub-etapa, un campo magnético de referencia (BCal) tiene unos primeros parámetros de campo magnético en la primera sub-etapa y unos segundos parámetros de campo magnético en la segunda sub-etapa, en el que tanto durante la primera etapa y una de entre la primera y la segunda sub-etapas de la segunda etapa el campo magnético de referencia (BCal) tiene una primera amplitud y una primera fase, que son sustancialmente iguales el método se caracteriza porque: ES 2 367 932 T3 durante otra de entre la primera o la segunda sub-etapas el campo magnético de referencia (BCal) tiene uno de entre a) una amplitud diferente a la primera amplitud y tiene la primera fase, b) una amplitud cero, o c) la primera amplitud y una fase opuesta a la primera fase; una señal de salida es detectada en la primera y la segunda sub-etapas; y una señal de salida es detectada dentro de la primera y la segunda sub-etapas. 2. Un método según la reivindicación 1, caracterizado porque la otra de entre la primera y la segunda subetapas es la segunda sub-etapa. 3. Un método según la reivindicación 1, en el que la otra de entre la primera y la segunda sub-etapas es la primera sub-etapa. 4. Un método según cualquiera de las reivindicaciones anteriores, en el que el campo magnético de referencia (BCal) tiene una amplitud linealmente creciente durante la primera o la segunda sub-etapa. 5. Un método acorde con cualquiera de las realizaciones anteriores, que comprende además la realización de un doble muestreo correlacionado en la señal de salida detectada del sensor de campo magnético. 6. Un producto de programa informático para la ejecución de todas las etapas del método de cualquiera de las reivindicaciones anteriores, cuando se ejecuta en un dispositivo de procesamiento asociado con un sensor de campo magnético. 7. Un dispositivo de almacenamiento de datos legibles por ordenador que almacena el producto de programa informático de la reivindicación 6. 8. La transmisión del producto de programa informático de la reivindicación 7 por una red de área local de telecomunicaciones o ancha. 9. Una unidad de control que comprende medios para la ejecución del método de cualquiera de las reivindicaciones 1 a 5. 10. Un dispositivo de medición de campo magnético, que comprende: un sensor (91) de campo magnético para la detección de un campo magnético (BExt), el sensor de campo magnético comprende por lo menos cuatro electrodos (a, b, c, d); un elemento de polarización (93) para la polarización del sensor de campo magnético; un circuito de medición para la medición de una señal de salida del sensor de campo magnético (91); una caja de distribución (92) para la conexión de un primer conjunto de electrodos (a, b) con el elemento de polarización y un segundo conjunto de electrodos (c, d) con los circuitos de lectura durante el primer periodo de tiempo, y para la conexión del segundo conjunto de electrodos (c, d) con el elemento de polarización (93) y el primer conjunto de electrodos (a, b) con los circuitos de lectura durante un segundo período de tiempo; un generador (98) de campo magnético de referencia para generar un campo magnético de referencia; y un elemento (99) de polarización de campo magnético de referencia para cambiar los parámetros de campo magnético del campo magnético de referencia. 16 en el que el dispositivo de medición de campo magnético se configura para cambiar los parámetros de campo magnético de referencia dentro de sólo uno de entre el primer o el segundo período de tiempo de modo que para el primer período y una primera parte del segundo período de tiempo el campo magnético de referencia tiene una primera amplitud y una primera fase 5 caracterizado porque ES 2 367 932 T3 para una segunda parte del segundo periodo de tiempo el campo magnético de referencia tiene una de entre a) una segunda amplitud que es diferente de la primera amplitud y la misma fase, b) una amplitud cero o c) la primera amplitud y una fase opuesta a la primera fase. 11. Un dispositivo de medición de campo magnético de acuerdo con la reivindicación 10, en el que el circuito de 10 medición se adapta para detectar una señal de salida del sensor de campo magnético por lo menos una vez durante cada uno de los periodos de tiempo primero y segundo, y durante por lo menos uno de los periodos de tiempo primero y segundo antes y después de cambiar los parámetros de campo magnético de referencia. 17 ES 2 367 932 T3 18 ES 2 367 932 T3 19 ES 2 367 932 T3 ES 2 367 932 T3 21 ES 2 367 932 T3 22 ES 2 367 932 T3 23 ES 2 367 932 T3 24 ES 2 367 932 T3 ES 2 367 932 T3 26 ES 2 367 932 T3 27 ES 2 367 932 T3 28 ES 2 367 932 T3 29
Patentes similares o relacionadas:
Sistema de detección de presión magnética para una bomba de infusión, del 19 de Febrero de 2020, de ZEVEX, INC.: Una bomba de infusión que puede funcionar para bombear fluido a través de un tubo conectado a la bomba de infusión, en donde la bomba de infusión […]
Dispositivo magnético multicapas, procedimiento para su realización, sensor de campo magnético, memoria magnética y puerta lógica que implementa un dispositivo de este tipo, del 25 de Abril de 2018, de COMMISSARIAT A L'ENERGIE ATOMIQUE ET AUX ENERGIES ALTERNATIVES: Dispositivo magnético multicapas, que incluye, sobre un substrato, una alternancia de capas metálicas magnéticas M y de óxidos, de hidruros o de nitruros O, […]
Sistema implantable para la determinación de la necesidad de acomodación a través de la medición de la orientación del globo ocular utilizando un campo magnético externo, del 27 de Julio de 2016, de KARLSRUHER INSTITUT FUR TECHNOLOGIE: Sistema implantable para la determinación de la necesidad de acomodación en un sistema de acomodación artificial a través de medición de la orientación […]
Sistema de detección de la desalineación de superficies sustentadoras para aeronave, del 6 de Noviembre de 2013, de SONACA S.A.: istema de detección de la desalineación de aletas de superficies sustentadoras para una aeronave, estando lasaletas montadas de manera articulada con respecto al […]
Dispositivo de detección para vehículos, del 7 de Mayo de 2013, de ELTEK S.P.A.: Tapón extraíble para vehículos, del tipo concebido para ocluir una boca de llenado de depósito de combustible,comprendiendo el tapón :
- una […]
Aparato doméstico con equipo de detección de la posición de la cerradura de una puerta con capacidad de autodiagnóstico, del 31 de Octubre de 2012, de BSH BOSCH UND SIEMENS HAUSGERATE GMBH: Aparato doméstico , particularmente aparato doméstico que conduce agua , que presenta al menos una puerta y medios de registro de la posición de la puerta, configurados […]
DISPOSICION DE SENSORES DE EFECTO HALL PARA LA MEDIDA DE UN CAMPO MAGNETICO CON COMPENSACION DE DESFASE., del 1 de Octubre de 2003, de FRAUNHOFER-GESELLSCHAFT ZUR FORDERUNG DER ANGEWANDTEN FORSCHUNG E.V.: Disposición del sensor de efecto Hall con las siguientes características: - un primer par (1A, 1B) de elementos del sensor de efecto Hall y, al menos, otro par (2A, […]
ELEMENTO CONSTRUCTIVO DE SENSOR HALL, del 16 de Mayo de 2008, de ZF LEMFORDER METALLWAREN AG: Elemento constructivo de sensor Hall con un sensor Hall a través del que puede fluir corriente eléctrica, por parte del que se puede entregar una señal de Hall […]
Utilizamos cookies para mejorar nuestros servicios y mostrarle publicidad relevante. Si continua navegando, consideramos que acepta su uso. Puede obtener más información aquí. .
 Sistema de detección de la desalineación de superficies sustentadoras para aeronave, del 6 de Noviembre de 2013, de SONACA S.A.: istema de detección de la desalineación de aletas de superficies sustentadoras para una aeronave, estando lasaletas montadas de manera articulada con respecto al […]
Sistema de detección de la desalineación de superficies sustentadoras para aeronave, del 6 de Noviembre de 2013, de SONACA S.A.: istema de detección de la desalineación de aletas de superficies sustentadoras para una aeronave, estando lasaletas montadas de manera articulada con respecto al […]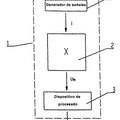 ELEMENTO CONSTRUCTIVO DE SENSOR HALL, del 16 de Mayo de 2008, de ZF LEMFORDER METALLWAREN AG: Elemento constructivo de sensor Hall con un sensor Hall a través del que puede fluir corriente eléctrica, por parte del que se puede entregar una señal de Hall […]
ELEMENTO CONSTRUCTIVO DE SENSOR HALL, del 16 de Mayo de 2008, de ZF LEMFORDER METALLWAREN AG: Elemento constructivo de sensor Hall con un sensor Hall a través del que puede fluir corriente eléctrica, por parte del que se puede entregar una señal de Hall […]