Sistema y método para el control asistido de un conjunto de eje motor para un vehículo industrial pesado y un vehículo industrial pesado que comprende dicho sistema.
Sistema para el control asistido de un conjunto de eje motor de un vehículo industrial pesado;
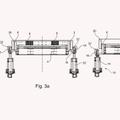
donde el vehículo comprende un motor con un árbol de accionamiento y un conjunto de eje motor; donde el sistema comprende dicho conjunto de eje motor y medios informáticos; donde el conjunto de eje motor comprende un conjunto de diferencial (6) con un engranaje hipoide (8) conectado de manera operativa con el árbol de accionamiento y al menos un eje accionado (9', 9'') para accionar un respectivo semieje (10', 10'') conectado con una respectiva rueda motriz; donde el al menos un semieje (10', 10'') está conectado de manera operativa con el respectivo eje accionado (9', 9'') mediante un respectivo engranaje reductor (20, 20'') adecuado para permitir un primer estado de reducción y un segundo estado de reducción, diferente a la primera, de la velocidad angular del semieje (10', 10'') con respecto a la velocidad angular del respectivo eje accionado (9', 9''); donde los medios informáticos (90) están configurados para
- calcular una posibilidad de conmutar entre dicho primer y segundo estado de reducción en función de una mejora del estado operativo del vehículo y
- generar una señal acústica o visual para el conductor o
- conmutar automáticamente la relación del eje motor entre dicho primer y segundo estado de reducción.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E12153032.
Solicitante: FPT Industrial S.p.A.
Nacionalidad solicitante: Italia.
Dirección: Via Puglia 15 10156 Torino ITALIA.
Inventor/es: ROSSIA,GIORGIO, GALLIANO,LUCA.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B60K17/04 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60K DISPOSICIONES O MONTAJE DE CONJUNTOS DE PROPULSION O DE TRANSMISIONES SOBRE VEHICULOS; DISPOSICIONES O MONTAJE DE VARIOS MOTORES PRINCIPALES DIFERENTES EN VEHÍCULOS; ACCIONAMIENTOS AUXILIARES PARA VEHICULOS; INSTRUMENTACION O TABLEROS DE A BORDO DE VEHICULOS; DISPOSICIONES DE CONJUNTOS DE PROPULSION SOBRE VEHICULOS, RELATIVAS A LA REFRIGERACION, A LA ADMISION DE AIRE, AL ESCAPE DE GASES O A LA ALIMENTACION DE CARBURANTE. › B60K 17/00 Disposiciones o montaje de las transmisiones en los vehículos (ejes que transmiten el par B60B 35/12; transmisiones y mecanismos de dirección combinados para dirigir las ruedas no orientables B62D 11/00; embragues en sí , p. ej. su construcción, F16D; engranajes en sí , p. ej. su construcción, F16H). › caracterizado por la disposición, el emplazamiento o el tipo de mecanismo de transmisión (equipamiento eléctrico o propulsión de vehículos con tracción eléctrica en sí B60L).
- B60K17/16 B60K 17/00 […] › del diferencial.
- F16D11/14 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F16 ELEMENTOS O CONJUNTOS DE TECNOLOGIA; MEDIDAS GENERALES PARA ASEGURAR EL BUEN FUNCIONAMIENTO DE LAS MAQUINAS O INSTALACIONES; AISLAMIENTO TERMICO EN GENERAL. › F16D ACOPLAMIENTOS PARA LA TRANSMISION DE MOVIMIENTOS DE ROTACION (transmisión para transmitir la rotación F16H, p. ej. transmisiones por fluidos F16H 39/00 - F16H 47/00 ); EMBRAGUES (embragues dinamo-eléctricos H02K 49/00; embragues que utilizan atracción electrostática H02N 13/00 ); FRENOS (sistemas de frenado electrodinámicos para vehículos, en general B60L 7/00; frenos dinamoeléctricos H02K 49/00). › F16D 11/00 Embragues en los cuales los órganos tienen partes que se penetran mutuamente (dispositivos para la sincronización F16D 23/02; embragues automáticos F16D 43/00 - F16D 45/00; control externo F16D 48/00). › con órganos de embrague móviles únicamente según el eje (F16D 11/02, F16D 11/08 tienen prioridad).
- F16D25/08 F16D […] › F16D 25/00 Embragues que se accionan por fluido (disposiciones para sincronización F16D 23/02; embragues de fluidos F16D 31/00 - F16D 39/00; embragues automáticos F16D 43/00 - F16D 45/00; control externo F16D 48/00). › con un órgano accionado por fluido que no gira con el órgano de embrague (F16D 25/02 tiene prioridad).
- F16D48/02 F16D […] › F16D 48/00 Control externo de embragues. › Control por presión de fluido.
- F16H3/54 F16 […] › F16H TRANSMISIONES. › F16H 3/00 Transmisiones de engranajes para transmitir un movimiento rotativo con una relación de velocidad variable o para invertir el movimiento rotativo (mecanismos, cambio de velocidad o de insersión F16H 59/00 - F16H 63/00). › siendo uno de los engranajes centrales dentado interiormente y el otro dentado exteriormente.
- F16H37/08 F16H […] › F16H 37/00 Combinaciones de transmisiones mecánicas no previstas anteriormente F16H 1/00 - F16H 35/00 (combinaciones de una transmisión mecánica con acoplamientos hidraúlicos o transmisión por fluido F16H 47/00). › con una transmisión diferencial.
PDF original: ES-2537879_T3.pdf
Fragmento de la descripción:
Sistema y método para el control asistido de un conjunto de eje motor para un vehículo industrial pesado y un vehículo industrial pesado que comprende dicho sistema Campo de la invención La presente invención pertenece al campo de la producción de vehículos industriales pesados. De manera más precisa, la invención hace referencia a un sistema y a un método para el control asistido de un conjunto de eje motor para un vehículo industrial pesado. La presente invención hace referencia además a un vehículo industrial pesado que comprende dicho conjunto de eje motor y medios para el control asistido de dicho conjunto de eje motor.
Descripción del arte previo En el campo de vehículos para el transporte de productos, una importante categoría de vehículos está representada por los vehículos industriales "pesados", concretamente vehículos que están diseñados para soportar una carga de trabajo particularmente pesada. Uno de los parámetros principales que influyen en la elección de estos vehículos es el tipo de carretera por la que van a viajar. Como es conocido, de hecho, los vehículos pesados pueden viajar "por carretera", concretamente por carreteras y autovías, o "campo a través", concretamente por carreteras con grava o sin asfaltar. Dependiendo de los diferentes casos, los vehículos adoptan diferentes soluciones para la transmisión desde el motor a los pares de ruedas motrices. Este hecho, por supuesto, da como resultado un rendimiento diferente del vehículo en cuanto a velocidad, tracción y consumo de combustible.
En general, cada vehículo industrial pesado comprende una transmisión que conecta la salida del motor del vehículo a uno o más conjuntos de eje motor que comprende los dos semiejes que soportan las correspondientes ruedas motrices. Cada conjunto de eje motor comprende tradicionalmente un cuerpo central, dentro del cual está colocado un conjunto de diferencial y éste se encuentra provisto de dos ejes accionados, cada uno de los cuales está conectado con uno de los dos semiejes. Tradicionalmente, el diferencial comprende un elemento motriz, generalmente en forma de una rueda cónica, conectada al motor del vehículo mediante una transmisión. Los vehículos pesados diseñados para viajar por carretera están por lo general provistos de dos o más pares de ruedas, siendo motriz únicamente uno de los pares. Esto significa que incluyen solamente un conjunto de eje motor según se describe anteriormente. En caso, por ejemplo, de un vehículo para carretera 6x2, hay presentes tres pares de ruedas (6 ruedas) , donde tan solo un par de ellas son motrices (2 ruedas) . Este tipo de vehículo comprende de forma habitual un eje frontal, un conjunto de eje motor trasero y un eje adicional que puede estar en la parte frontal o central, dependiendo de los diferentes casos. En su lugar, en el caso de un vehículo pesado 8x2 están presentes dos ejes frontales, un conjunto de eje motor y un eje adicional.
En general, los vehículos industriales "para carretera" tienen únicamente un conjunto de eje motor, ya que se requiere que estos vehículos tengan un rendimiento óptimo en cuanto a velocidad y consumo de combustible, pero no en cuanto a tracción disponible. Por el contrario, los vehículos pesados diseñados para ser utilizados "campo a través" deberían tener un rendimiento óptimo en cuanto a la tracción. Por esta razón, tales vehículos tienen dos o más conjuntos de eje motor, posiblemente provistos con un engranaje reductor en correspondencia con las ruedas motrices, para aumentar el par motor disponible para las propias ruedas. Los vehículos para campo a través pueden ser, por ejemplo, del tipo 6x4, concretamente pueden estar equipados con 6 ruedas, 4 de las cuales son ruedas motrices accionadas por dos conjuntos de ejes motores.
En algunos casos, tales vehículos comprenden un par de engranajes reductores, cada uno de ellos situados entre una rueda motriz y el extremo del correspondiente semieje al que la propia rueda se encuentra sujeto mediante una ranura. Los vehículos provistos de una solución técnica de este tipo son perfectos para viajar campo a través, pero son demasiado caros si se utilizan en carretera, sobre todo en cuanto a eficiencia y consumo de combustible, ya que la presencia de un número mayor de conjuntos de eje motor aumenta notablemente la tara del vehículo.
En diversas situaciones, sin embargo, los vehículos industriales pesados se utilizan con frecuencia tanto en campo a través como en carretera. Un primer ejemplo está representado por los vehículos utilizados para transportar materias primas tales como tierra de excavaciones, áridos, yeso, pórfido, mármol, etc. En este caso, el material se carga en terrenos de construcción o canterías, por tanto el vehículo tiene que viajar por vías campo a través. Tales vías son a menudo de superficie irregular y en muchos casos están caracterizadas por pendientes pronunciadas. La carga se transporta a continuación hasta su destino, mayoritariamente sobre vías "por carretera" y/o por autovías. Un segundo ejemplo de uso "mixto" (es decir, en parte campo a través, en parte por carretera) está representado por vehículos utilizados para la recogida de basuras y la descarga de basuras. En este caso la recogida de basuras tiene lugar en áreas urbanas (por tanto "por carretera") , mientras que la descarga tiene lugar en vertederos de residuos a los que, en la mayoría de los casos, sólo se puede acceder a través de carreteras sin asfaltar (por tanto, "campo a través") . Además, otro ejemplo de uso "mixto" está representado por vehículos para la carga y el
transporte de productos agrícolas, especialmente en grandes latifundios, tales como por ejemplo plantaciones americanas o africanas.
Se ha observado que las actuales soluciones para el transporte por vías "mixtas" no son en absoluto satisfactorias. En la actualidad, de hecho, cuando las vías "mixtas" son mayoritariamente "en carretera", la elección se orienta habitualmente hacia vehículos más ligeros (por ejemplo, 4x2) , siendo conscientes de que el respectivo "conjunto de eje motor" necesitará ser reemplazado después de un número reducido de kilómetros. Por el contrario, si las vías "mixtas" son mayoritariamente "campo a través", entonces se eligen los vehículos que son adecuados para estas vías. Por tanto en este caso, se prefiere un vehículo más costoso, también en cuanto a consumo de combustible, debido a la ventaja de poseer un conjunto de eje motor de mayor vida útil, es decir, con un mantenimiento reducido.
En cualquier caso, sin embargo, los vehículos industriales pesados que se encuentran actualmente en el mercado no son lo suficientemente versátiles, concretamente no pueden asegurar una buena velocidad y un bajo consumo de combustible cuando se utilizan en carretera, y una tracción óptima cuando se utilizan campo a través. Es por tanto evidente la necesidad de soluciones técnicas alternativas que permitan superar esta limitación actual, es decir, que aumente la versatilidad funcional de un vehículo industrial en cuanto a velocidad, consumo de combustible, par motor, configurabilidad y resistencia a la fatiga, tanto en aplicaciones para carretera como en campo a través.
La patente US 2858714A revela un conjunto de eje motor de dos velocidades de un vehículo industrial pesado.
Resumen de la invención La principal tarea de la presente invención es proporcionar un sistema para el control asistido de un conjunto de eje motor para un vehículo industrial pesado que permita obtener una versatilidad funcional mayor que la obtenida por los vehículos industriales pesados del tipo conocido en el arte. En el área de esta tarea, un primer objeto de la presente invención es proporcionar un conjunto de eje motor para un vehículo industrial que es adecuado para viajar tanto en carreteras y autovías (por carretera) , como por terrenos con superficies no asfaltadas y/o irregulares (campo a través) . Otro objeto de la presente invención es proporcionar un sistema para el control asistido de un conjunto de eje motor para un vehículo industrial pesado que permite obtener un rendimiento óptimo en cuanto al consumo de combustible (en cualquier condición de viaje) y una resistencia a la fatiga óptima de las piezas de transmisión.
Esta tarea y estos objetos se logran mediante un sistema para el control asistido de un conjunto de eje motor para un vehículo industrial pesado según lo que se expone en la Reivindicación 1, además de un método de acuerdo con la reivindicación 6.
De acuerdo a la presente invención el conjunto de eje motor está equipado, por tanto, para cada semieje y aguas abajo del diferencial, con un engranaje reductor que puede conmutarse de un primer estado operativo, en donde realmente realiza... [Seguir leyendo]
Reivindicaciones:
1. Sistema para el control asistido de un conjunto de eje motor de un vehículo industrial pesado; donde el vehículo comprende un motor con un árbol de accionamiento y un conjunto de eje motor; donde el sistema comprende dicho conjunto de eje motor y medios informáticos; donde el conjunto de eje motor comprende un conjunto de diferencial (6) con un engranaje hipoide (8) conectado de manera operativa con el árbol de accionamiento y al menos un eje accionado (9, 9) para accionar un respectivo semieje (10, 10) conectado con una respectiva rueda motriz; donde el al menos un semieje (10, 10) está conectado de manera operativa con el respectivo eje accionado (9, 9) mediante un respectivo engranaje reductor (20, 20) adecuado para permitir un primer estado de reducción y un segundo estado de reducción, diferente a la primera, de la velocidad angular del semieje (10, 10) con respecto a la velocidad angular del respectivo eje accionado (9, 9) ; donde los medios informáticos (90) están configurados para -calcular una posibilidad de conmutar entre dicho primer y segundo estado de reducción en función de una mejora del estado operativo del vehículo y -generar una señal acústica o visual para el conductor o -conmutar automáticamente la relación del eje motor entre dicho primer y segundo estado de reducción.
2. Sistema según la reivindicación 1, en donde dichos medios informáticos están configurados adicionalmente para realizar una etapa (200) de adquisición de los parámetros operativos actuales, incluyendo el par del motor (Cm) , revoluciones por minuto del motor (nm) , velocidad del motor (S) , estado de conmutación (ON/OFF) de los engranajes reductores (20, 20) .
3. Sistema según una de las reivindicaciones precedentes, en donde dicha mejora de dicho estado operativo del vehículo comprende una reducción del consumo de combustible (K - K*) .
4. Sistema según una de las reivindicaciones precedentes, en donde dicha mejora de dicho estado operativo del vehículo comprende una reducción (Ch - Ch*) del estrés mecánico en el engranaje hipoide (8) .
5. Sistema según la reivindicación 3, en donde dicha mejora de dicho estado operativo del vehículo comprende una reducción del estrés mecánico en el engranaje hipoide (8) , expresada como una reducción del par motor (Ch - Ch*) y en donde una combinación lineal de dicha reducción del par (Ch -Ch*) y de dicha reducción del consumo de combustible (Ch -Ch*) está en función de a la determinación de un valor numérico que puede ser comparado con umbrales apropiados para el cálculo de la posibilidad de conmutar entre las condiciones operativas de los engranajes reductores (20, 20) .
6. Método para el control asistido de un conjunto de eje motor de un vehículo industrial pesado, donde el vehículo comprende un motor que tiene un árbol de accionamiento y un conjunto de eje motor; donde el conjunto de eje motor comprende un conjunto de diferencial (6) que tiene un engranaje hipoide (8) conectado de forma operativa con el árbol de accionamiento y al menos un eje accionado (9, 9) para accionar un respectivo semieje (10, 10) conectado con una respectiva rueda motriz; el al menos un semieje (10, 10) está conectado de forma operativa al respectivo eje accionado (9, 9) mediante un respectivo engranaje reductor (20, 20) adecuado para permitir un primer estado de reducción y un segundo estado de reducción, diferente de la primera, de la velocidad angular del semieje (10, 10) con respecto a la velocidad angular del respectivo eje accionado (9, 9) ; donde el método comprende
- una etapa (200) de adquisición de los parámetros operativos actuales, incluyendo el par motor (Cm) , als revoluciones por minuto del motor (nm) , velocidad del vehículo (S) , estado de conmutación (ON/OFF) de los engranajes reductores (20, 20)
- una etapa de cálculo de una posibilidad de conmutación entre dicho primer y segundo estado de reducción en función de una mejora del estado operativo del vehículo, en donde dicha mejora de dicho estado de reducción del vehículo comprende una reducción (Ch - Ch*) del estrés mecánico en el engranaje hipoide (8)
- generar una señal acústica u óptica para el conductor o -automáticamente conmutar la relación del eje motor entre dicho primer y segundo estado operativo.
7. Vehículo industrial que comprende el sistema según la reivindicación 1.
8. Programa informático que comprende medios de código de programa adecuados para llevar a cabo todas las etapas de la reivindicación 6, cuando dicho programa se ejecuta en un ordenador.
9. Medio legible por ordenador que comprende un programa grabado, donde dicho medio legible por ordenador comprende un medio de código de programa adecuado para realizar todas las etapas de la reivindicación 6, cuando dicho programa se ejecuta en un ordenador.
Patentes similares o relacionadas:
Dispositivo de embrague de garras con elementos de embrague en construcción de material compuesto de fibras-plástico., del 1 de Enero de 2020, de HORIBA Europe GmbH: Mitad de embrague con varios elementos de embrague , en la que - cada elemento de embrague presenta una zona de garras libremente sobresaliente […]
Conexión de árbol para un vehículo, del 18 de Septiembre de 2019, de IVECO S.P.A.: Un acoplamiento de árbol que comprende: - un primer segmento de árbol y un segundo segmento de árbol , estando dicho segundo segmento […]
 Dispositivo de acoplamiento, del 26 de Junio de 2019, de Siemag Tecberg GmbH: Dispositivo de acoplamiento para la unión desmontable de al menos un tambor libre alojado de manera giratoria en un árbol principal de una […]
Dispositivo de acoplamiento, del 26 de Junio de 2019, de Siemag Tecberg GmbH: Dispositivo de acoplamiento para la unión desmontable de al menos un tambor libre alojado de manera giratoria en un árbol principal de una […]
Accionamiento lineal electromotriz, del 27 de Marzo de 2019, de DewertOkin GmbH (100.0%): Accionamiento lineal electromotriz para usar en muebles y elevadores de pacientes, que está provisto de una unidad de accionamiento, cuyo miembro de salida del […]
Sistemas y métodos para operar superficies de control de vuelo, del 16 de Enero de 2019, de THE BOEING COMPANY: Un dispositivo de control que comprende: un árbol de dos piezas que incluye una primera parte de árbol y una segunda parte de árbol […]
SISTEMA DE DESCONEXION DE EJES DE AERONAVES, del 16 de Agosto de 2018, de CT INGENIEROS AERONAUTICOS, DE AUTOMOCIÓN E INDUSTRIALES, S.L: Sistema de desconexión de ejes de aeronaves, que comprende un embrague de dientes para el acoplamiento de un casquillo de acoplamiento , unido a un primer […]
SISTEMA DE DESCONEXION DE EJES DE AERONAVES, del 17 de Abril de 2017, de CT INGENIEROS AERONAUTICOS, DE AUTOMOCIÓN E INDUSTRIALES, S.L: Sistema de desconexión de ejes de aeronaves, que comprende un embrague de dientes para el acoplamiento de un casquillo de acoplamiento , unido a un primer eje […]
PEDAL EMBRAGUE ELECTRÓNICO PARA VEHÍCULO, del 22 de Diciembre de 2016, de PLASTIC COMPONENTS AND MODULES AUTOMOTIVE S.p.A: 1. Pedal embrague electrónico para vehículo, que comprende un cuerpo de sujeción para ser montado en posición fija en un habitáculo […]