APLICADOR ENDOSCÓPICO DE GRAPAS QUIRÚRGICAS.
Aparato (1010) para la aplicación de grapas quirúrgicas a tejido corporal,
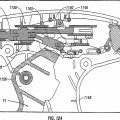
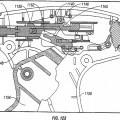
que comprende: a) una parte de asidero (1158); b) un cuerpo (14) que se extiende distalmente desde la parte de asidero (1158) y que define un eje longitudinal; c) una pluralidad de grapas quirúrgicas (300) dispuestas dentro del cuerpo (14); d) un conjunto de mordaza (16) montado de manera adyacente a una parte de extremo distal del cuerpo (14), incluyendo el conjunto de mordaza (16) una primera y segunda partes de mordaza (1016a, 1016b) móviles entre una posición separada y una aproximada; e) una barra de alimentación (1120) que comprende una ventana distal (1122) y configurada para hacer avanzar distalmente de manera individual una de las grapas quirúrgicas (300) hacia el conjunto de mordaza (16) mientras que las partes de mordaza (1016a, 1016b) están en la posición separada; f) un dispositivo de empuje de grapas (1118) dispuesto proximal a la pluralidad de grapas (300) y configurado para desplazar la pluralidad de grapas (300) de manera distal; g) un accionador (1132) dispuesto por lo menos parcialmente dentro del cuerpo (14) y móvil longitudinalmente en respuesta al accionamiento de la parte de asidero (1158); h) un elemento de cierre de mordaza (200) situado adyacente a la primera y segunda partes de mordaza (1016a, 1016b) para mover las partes de mordaza (1016a, 1016b) a la posición aproximada; i) una cremallera (1140) que presenta una pluralidad de dientes de trinquete (44) que están conectados a dicho accionador (1132); y j) un fiador (1146) que presenta por lo menos un diente (178) configurado para acoplarse con dichos dientes de trinquete (44), estando desplazado el fiador (1146) en la parte de asidero (1158), en el que cuando el accionador (1132) se mueve longitudinalmente, la pluralidad de dientes de trinquete (44) pasan sobre el fiador (1146), estando configurado el fiador (1146) para evitar el retorno inadvertido del accionador (1132) antes del accionamiento completo del aparato (1010); caracterizado porque el dispositivo de empuje de grapas (1118) se mueve de manera incremental distalmente cada vez que una de las grapas (300) se libera del aparato (1010), porque cuando el dispositivo de empuje de grapas (1118) alcanza un punto distal predeterminado en un canal de soporte de grapas (1102), una barra de bloqueo (1106) se desvía hasta una segunda posición para acoplarse con la ventana distal (1122) de la barra de alimentación (1120), presentando la barra de alimentación (1120) una parte que está acoplada con el accionador (1132) evitando la retracción pero no el avance del accionador (1132) y manipulando de ese modo el fiador (1146) para que se acople con los dientes de trinquete (44) de la cremallera (1140), evitando el fiador (1146) y la cremallera (1140) que el accionador (1132) se mueva longitudinalmente para bloquear de ese modo el accionador (1132); y porque el aparato comprende además k) un dispositivo de bloqueo secundario configurado para romper una conexión entre la parte de asidero (1158) y el accionador (1132) y evitar el movimiento longitudinal del accionador (1132) en respuesta al accionamiento de la parte de asidero (1158) cuando se aplica una fuerza predeterminada a la parte de asidero (1158), siendo la fuerza predeterminada menor que la fuerza requerida para desalojar los dientes de trinquete (44) del fiador (1146)
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E07253807.
Solicitante: TYCO HEALTHCARE GROUP LP.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 60 MIDDLETOWN AVENUE NORTH HAVEN, CT 06473 ESTADOS UNIDOS DE AMERICA.
Inventor/es: WHITFIELD, KENNETH H., SORRENTINO, GREGORY.
Fecha de Publicación: .
Fecha Solicitud PCT: 26 de Septiembre de 2007.
Clasificación Internacional de Patentes:
- A61B17/128E
Clasificación PCT:
- A61B17/128 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61B DIAGNOSTICO; CIRUGIA; IDENTIFICACION (análisis de material biológico G01N, p.ej. G01N 33/48). › A61B 17/00 Instrumentos, dispositivos o procedimientos quirúrgicos, p. ej. torniquetes (A61B 18/00 tiene prioridad; dispositivos anticonceptivos, pesarios, dispositivos para su introducción A61F 6/00; cirugía ocular A61F 9/007; cirugía otorrina A61F 11/00). › para aplicar o quitar clamps o pinzas.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
PDF original: ES-2358613_T3.pdf
Fragmento de la descripción:
Divulgación
ANTECEDENTES
Campo técnico
La presente divulgación se refiere a un aplicador de grapas quirúrgicas según la reivindicación 1. Más particularmente, la presente divulgación se refiere a un aplicador de grapas quirúrgicas que presenta un mecanismo para estabilizar una estructura de mordaza del aplicador de grapas quirúrgicas y que también presenta un mecanismo para evitar el disparo del aplicador de grapas quirúrgicas cuando el aplicador de grapas quirúrgicas ha agotado la cantidad de grapas almacenadas para evitar un disparo en seco del aplicador de grapas quirúrgicas.
Antecedentes de la técnica relacionada
Las intervenciones laparoscópicas se realizan en el interior del abdomen. Las intervenciones se llevan a cabo a través de una pequeña incisión y a través de una cánula o tubo endoscópico estrecho insertado a través de una pequeña incisión de entrada en la piel. Intervenciones mínimamente invasivas realizadas en otras partes del cuerpo a menudo se denominan en general intervenciones “endoscópicas”. El cirujano insertará y extenderá un dispositivo de cánula o tubo en el cuerpo a través de la incisión de entrada para proporcionar un orificio de acceso. Este orificio permite la inserción de diversos instrumentos quirúrgicos a su través.
Estos instrumentos tales como el aplicador de grapas instantáneo se utilizan para realizar intervenciones quirúrgicas en órganos, vasos sanguíneos, conductos, o tejido corporal alejado de la incisión. A menudo, durante estas intervenciones, es necesario aplicar grapas hemostáticas a vasos sanguíneos o diversos conductos para evitar el flujo de los líquidos corporales a su través durante la intervención. Pueden utilizarse muchas grapas hemostáticas diferentes que presentan geometrías diferentes y todas están dentro del alcance de la presente divulgación.
Una ventaja de las intervenciones quirúrgicas mínimamente invasivas es la reducción de traumatismo para el paciente como resultado del acceso a los órganos internos a través de incisiones más pequeñas. Los aplicadores endoscópicos de grapas conocidos han facilitado enormemente la llegada de intervenciones mínimamente invasivas más avanzadas permitiendo varias aplicaciones de grapa durante una única entrada en la cavidad corporal. Los aplicadores endoscópicos de grapas comercialmente disponibles presentan generalmente un diámetro exterior de 10 mm y están adaptados para introducirse a través de una cánula de 10 mm. Otros aplicadores endoscópicos de grapas comercialmente disponibles también pueden presentar generalmente un diámetro exterior de 5 mm y están adaptados para introducirse a través de una cánula de 5 mm.
El documento WO 2006/042076 se refiere a un aplicador endoscópico de grapas quirúrgicas El aplicador comprende una placa de cuña configurada para mantener el conjunto de mordaza en la posición separada durante la carga de la grapa quirúrgica. También reduce el par de torsión y las fuerzas externas en el conjunto de mordaza durante la carga.
El documento EP 1317906 da a conocer un aplicador de grapas quirúrgicas. El aplicador comprende un mecanismo de bloqueo para hacer que el aplicador de grapas no pueda operarse al deformarse la última grapa de la serie de grapas, incluyendo el mecanismo de bloqueo un primer elemento de bloqueo para acoplarse con una placa de leva para evitar el movimiento de la placa de leva, y por lo menos un elemento rompible para desacoplar la placa de leva de los asideros al cerrar los asideros cuando el primer elemento de bloqueo está acoplado con la placa de leva.
Puesto que las intervenciones mínimamente invasivas continúan evolucionando y sus ventajas se extienden a aplicaciones clínicas adicionales, se ha vuelto deseable reducir adicionalmente el/los tamaño(s) de incisión y por tanto el tamaño de todos los instrumentos introducidos a su través.
La estructura del instrumental quirúrgico destinado a realizar numerosas funciones dentro de un espacio limitado es necesariamente compleja. El proceso de montaje para estos instrumentos a menudo es complicado y puede implicar numerosas piezas relativamente pequeñas para realizar las numerosas funciones con repetibilidad. Por tanto, es deseable maximizar la facilidad con la que pueden ensamblarse tales instrumentos. También es deseable proporcionar un aplicador endoscópico de grapas que presente una estructura que minimice la torsión en las mordazas y que facilite la aplicación sencilla de las grapas hemostáticas quirúrgicas mientras se minimiza adicionalmente el tamaño de incisión requerido en el sitio quirúrgico. También es deseable proporcionar un aplicador endoscópico de grapas que presente una estructura que evite que el cirujano dispare el aplicador de grapas (y que bloquea el asidero) cuando no quedan más grapas hemostáticas en el aplicador de grapas. Además, es deseable proporcionar un aplicador endoscópico de grapas que presente una estructura que proporcione al cirujano múltiples señales redundantes de que el aplicador de grapas ha disparado y ha aplicado la grapa.
**(Ver fórmula)**
SUMARIO
Un objetivo de la presente divulgación es proporcionar un aplicador de grapas quirúrgicas que evita un
disparo en seco del aplicador de grapas quirúrgicas cuando no quedan grapas y que no pueda disparar cuando no
quedan grapas.
Un objetivo adicional de la presente divulgación es proporcionar un aplicador de grapas quirúrgicas que señale a un cirujano cuando se ha disparado una grapa.
Todavía otro objetivo de la presente divulgación es proporcionar un aplicador de grapas quirúrgicas que señale visualmente a un cirujano cuando se ha disparado una grapa.
Todavía otro objetivo de la presente divulgación es proporcionar un aplicador de grapas quirúrgicas que
presente un pomo alargado para permitir que un cirujano gire el pomo alargado para girar la parte endoscópica
utilizando sólo el dedo índice.
Todavía otro objetivo de la presente divulgación es proporcionar un aplicador de grapas quirúrgicas que presente un mecanismo de bloqueo de accionamiento que sea sencillo de fabricar.
En una forma de realización, la presente invención proporciona un aparato (1010) para la aplicación de grapas quirúrgicas a tejido corporal, que comprende:
a) una parte de asidero (1158);
b) un cuerpo (14) que se extiende distalmente desde la parte de asidero (1158) y que define un eje longitudinal;
c) una pluralidad de grapas quirúrgicas (300) dispuestas dentro del cuerpo (14);
d) un conjunto de mordaza (16) montado adyacente a una parte de extremo distal del cuerpo (14), incluyendo el conjunto de mordaza (16) una primera y segunda partes de mordaza (1016a, 1016b) móviles entre una posición separada y una aproximada;
e) una barra de alimentación (1120) configurada para hacer avanzar distalmente de manera individual a una de las grapas quirúrgicas (300) hacia el conjunto de mordaza (16) mientras que las partes de mordaza (1016a, 1016b) están en la posición separada;
f) un dispositivo de empuje de grapas (1118) dispuesto proximal a la pluralidad de grapas (300) y configurado para desplazar la pluralidad de grapas (300) de manera distal;
g) un accionador (1132) dispuesto por lo menos parcialmente dentro del cuerpo (14) y móvil longitudinalmente en respuesta al accionamiento de la parte de asidero (1158);
h) un elemento de cierre de mordaza (200) situado adyacente a la primera y segunda partes de mordaza (1016a, 1016b) para mover las partes de mordaza (1016a, 1016b) a la posición aproximada;
i) una cremallera (1140) que presenta una pluralidad de dientes de trinquete (44) que están conectados a dicho accionador (1132); y
j) un fiador (1146) que presenta por lo menos un diente (178) configurado para acoplarse con dichos dientes de trinquete (44), estando desplazado el fiador (1146) en la parte de asidero (1158), en el que cuando el accionador (1132) se mueve longitudinalmente, la pluralidad de dientes de trinquete (44) pasan sobre el fiador (1146), estando configurado el fiador (1146) para evitar el retorno inadvertido del accionador (1132) antes del accionamiento completo del aparato (1010); y
en el que el dispositivo de empuje de grapas (1118) se mueve de manera incremental distalmente cada vez... [Seguir leyendo]
Reivindicaciones:
1. Aparato (1010) para la aplicación de grapas quirúrgicas a tejido corporal, que comprende:
a) una parte de asidero (1158);
b) un cuerpo (14) que se extiende distalmente desde la parte de asidero (1158) y que define un eje longitudinal;
c) una pluralidad de grapas quirúrgicas (300) dispuestas dentro del cuerpo (14);
d) un conjunto de mordaza (16) montado de manera adyacente a una parte de extremo distal del cuerpo (14), incluyendo el conjunto de mordaza (16) una primera y segunda partes de mordaza (1016a, 1016b) móviles entre una posición separada y una aproximada;
e) una barra de alimentación (1120) que comprende una ventana distal (1122) y configurada para hacer avanzar distalmente de manera individual una de las grapas quirúrgicas (300) hacia el conjunto de mordaza (16) mientras que las partes de mordaza (1016a, 1016b) están en la posición separada;
f) un dispositivo de empuje de grapas (1118) dispuesto proximal a la pluralidad de grapas (300) y configurado para desplazar la pluralidad de grapas (300) de manera distal;
g) un accionador (1132) dispuesto por lo menos parcialmente dentro del cuerpo (14) y móvil longitudinalmente en respuesta al accionamiento de la parte de asidero (1158);
h) un elemento de cierre de mordaza (200) situado adyacente a la primera y segunda partes de mordaza (1016a, 1016b) para mover las partes de mordaza (1016a, 1016b) a la posición aproximada;
i) una cremallera (1140) que presenta una pluralidad de dientes de trinquete (44) que están conectados a dicho accionador (1132); y
j) un fiador (1146) que presenta por lo menos un diente (178) configurado para acoplarse con dichos dientes de trinquete (44), estando desplazado el fiador (1146) en la parte de asidero (1158), en el que cuando el accionador (1132) se mueve longitudinalmente, la pluralidad de dientes de trinquete (44) pasan sobre el fiador (1146), estando configurado el fiador (1146) para evitar el retorno inadvertido del accionador (1132) antes del accionamiento completo del aparato (1010);
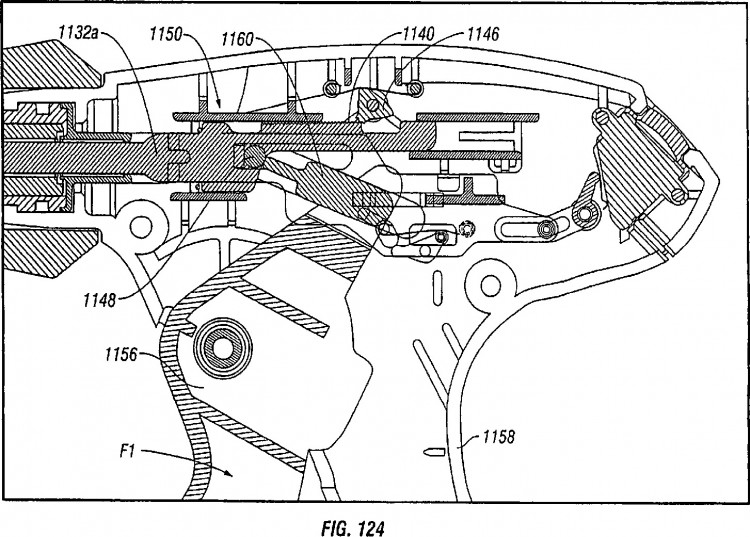
caracterizado porque el dispositivo de empuje de grapas (1118) se mueve de manera incremental distalmente cada vez que una de las grapas (300) se libera del aparato (1010), porque cuando el dispositivo de empuje de grapas (1118) alcanza un punto distal predeterminado en un canal de soporte de grapas (1102), una barra de bloqueo (1106) se desvía hasta una segunda posición para acoplarse con la ventana distal (1122) de la barra de alimentación (1120), presentando la barra de alimentación (1120) una parte que está acoplada con el accionador (1132) evitando la retracción pero no el avance del accionador (1132) y manipulando de ese modo el fiador (1146) para que se acople con los dientes de trinquete (44) de la cremallera (1140), evitando el fiador (1146) y la cremallera (1140) que el accionador (1132) se mueva longitudinalmente para bloquear de ese modo el accionador (1132); y porque el aparato comprende además
k) un dispositivo de bloqueo secundario configurado para romper una conexión entre la parte de asidero (1158) y el accionador (1132) y evitar el movimiento longitudinal del accionador (1132) en respuesta al accionamiento de la parte de asidero (1158) cuando se aplica una fuerza predeterminada a la parte de asidero (1158), siendo la fuerza predeterminada menor que la fuerza requerida para desalojar los dientes de trinquete (44) del fiador (1146).
2. Aparato (1010) según la reivindicación 1, en el que el dispositivo de bloqueo secundario incluye un elemento de conexión (1160) que conecta el accionador (1132) a la parte de asidero (1158) y un pasador de seguridad (1448) que conecta el elemento de conexión al accionador (1132).
3. Aparato (1010) según la reivindicación 2, en el que el pasador de seguridad (1448) es generalmente cilíndrico e incluye un cuerpo (1152) que presenta un primer diámetro y una segunda sección (1154, 1156) que presenta un segundo diámetro que es menor que el primer diámetro, en el que con la aplicación de la fuerza predeterminada el pasador de seguridad (1448) se rompe a lo largo del segundo diámetro.
4. Aparato según la reivindicación 1, en el que la barra de bloqueo (1106) está desplazada por un resorte (1100) y está alojada entre un techo y un suelo del canal de soporte de grapas (1102), en el que el dispositivo de empuje de grapas (1118) mueve la barra de bloqueo (1106) distalmente, y en el que cuando la barra de bloqueo
(1106) está en alineación sustancial con la ventana distal (1100), la barra de bloqueo (1106) se mueve a través de la ventana distal (1122) a la segunda posición desviada.
5. Aparato (1010) según la reivindicación 4, en el que la barra de alimentación (1120) presenta una aleta (1119) proximal, estando configurada la aleta (1119) para evitar que el accionador (1132) se mueva proximalmente en la segunda posición desviada.
6. Aparato (1010) según la reivindicación 4, en el que la barra de alimentación (1120) presenta un par de aletas (1119) proximales, estando por lo menos una configurada para evitar que el accionador (1132) se mueva proximalmente en la segunda posición.
7. Aparato (1010) según la reivindicación 4, en el que la barra de alimentación (1120) presenta un par de aletas (1119) proximales estando el par conectado y presentando una forma de “U”, estando por lo menos una configurada para evitar que el accionador (1132) se mueva proximalmente en la segunda posición.
8. Aparato (1010) según la reivindicación 5, en el que el accionador (1132) presenta una ventana proximal (1134), acoplándose la aleta (1119) con la ventana (1134) para evitar que el accionador (1132) se mueva proximalmente en la segunda posición desviada.
9. Aparato (1010) según la reivindicación 4, en el que el resorte (1100) y la barra de bloqueo (1106) están dispuestos en un canal (1117) del dispositivo de empuje de grapas (1118), estando situado el resorte (1100) debajo de la barra de bloqueo (1106).
**(Ver fórmula)**
10. Aparato (1010) según la reivindicación 4, en el que la barra de bloqueo (1106) es un elemento elástico.
11. Aparato (1010) según la reivindicación 4, en el que la cremallera (1140) y el fiador (1146) están situados en la parte de asidero (1158).
12. Aparato (1010) según la reivindicación 4, en el que la cremallera (1110) que presenta la pluralidad de dientes de trinquete (44) está conectada a la parte de asidero (1158), y en el que el fiador (1146) está conectado al accionador (1132).
13. Aparato (1010) según la reivindicación 4, en el que la ventana distal (1122) está situada en un extremo del canal de soporte de grapas (1102).
14. Aparato (1010) según la reivindicación 4, en el que el fiador (1146) está acoplado con la cremallera (1140), y en el que el fiador (1146) y la cremallera (1140) evitan que el accionador (1132) se mueva longitudinalmente cuando no hay grapas (300) en el canal de soporte de grapas (1102).
15. Aparato (1010) según la reivindicación 5, en el que el fiador (1146) está acoplado con la cremallera (1140) y el fiador (1146) y la cremallera (1140) evitan que el accionador (1132) se mueva longitudinalmente cuando hay dos grapas de la pluralidad de grapas (300) en el canal de soporte de grapas (1102).
16. Aparato (1010) según la reivindicación 4, en el que la barra de alimentación (1120) está en la segunda posición desviada, y en el que la barra de alimentación (1120) evita que el accionador (1132) se mueva proximalmente manipulando de ese modo el fiador (1146) para que se acople con los dientes (44) de la cremallera (1140) en una posición sustancialmente intermedia de la cremallera (1140), estando acoplados el fiador (1146) y la cremallera (1140), evitando de ese modo el acoplamiento que el accionador (1132) se mueva longitudinalmente.
17. Aparato (1010) según la reivindicación 4, en el que en la segunda posición desviada la barra de alimentación (1120) no es paralela al eje longitudinal.
18. Aparato (1010) según la reivindicación 4, en el que la barra de alimentación (1120) se mueve desde una posición inicial a la segunda posición, siendo la segunda posición una posición que está desviada del eje longitudinal.
19. Aparato (1010) según la reivindicación 1, en el que el accionador (1132) comprende un husillo (1132).
20. Aparato (1010) según la reivindicación 5, en el que el resorte (1100) es un resorte de hojas (1100), en el que el resorte de hojas (1100) y la barra de bloqueo (1106) están dispuestos en un canal (1117) situado de manera distal del dispositivo de empuje de grapas (1118), en el que el resorte de hojas (1100) está dispuesto debajo de la barra de bloqueo (1106) y configurado para desplazar la barra de bloqueo (1106) hacia arriba con respecto al suelo del canal de soporte de grapas (1102).
21. Aparato (1010) según la reivindicación 20, en el que la barra de bloqueo (1106) presenta un extremo proximal en gancho (1116) que se acopla con una parte del dispositivo de empuje de grapas (1118) en el canal, de
manera que la barra de bloqueo (1106) se mueva distalmente con el dispositivo de empuje de grapas (1118).
22. Aparato (1010) según la reivindicación 21, en el que el extremo proximal en gancho (1116) se acopla con una abertura (1114) en el suelo para manipular la barra de bloqueo (1106) hacia arriba con respecto al suelo del
**(Ver fórmula)**
5 canal de soporte de grapas (1102), y en el que cuando la barra de bloqueo (1106) está en alineación con la ventana distal (1110) del canal de soporte de grapas (1102), el extremo proximal en gancho (1116) se acopla con una abertura dispuesta en el suelo del canal de soporte de grapas (1102).
23. Aparato (1010) según la reivindicación 22, en el que la aleta proximal (1119) se apoya en la ventana proximal (1134) y no interfiere con el movimiento del accionador (1132) cuando el accionador (1132) presenta un movimiento alternativo longitudinal durante un recorrido de disparo.
24. Aparato (1010) según la reivindicación 1, en el que el aparato (1010) está configurado para
aplicaciones quirúrgicas endoscópicas.15
25. Aparato (1010) según la reivindicación 24, en el que el aparato (1010) presenta el cuerpo (14) que está configurado para cirugía bariátrica.
26. Aparato (1010) según la reivindicación 24, en el que el cuerpo (14) presenta una longitud de por lo 20 menos treinta centímetros.
Patentes similares o relacionadas:
APLICADOR DE CLIPS QUIRÚRGICOS, del 28 de Diciembre de 2011, de ETHICON ENDO-SURGERY, INC.: Un aplicador de clips quirúrgicos, que comprende: un alojamiento que tiene un gatillo acoplado de forma amovible al mismo y un eje alargado que se extiende […]
DISPOSITIVOS Y PROCEDIMIENTO PARA LA INVAGINACIÓN DE TEJIDO, del 2 de Diciembre de 2011, de BOSTON SCIENTIFIC LIMITED: Un dispositivo quirúrgico adaptado para sujetar el tejido esofágico durante un procedimiento de fundoplicatura, que comprende: - un miembro proximal que tiene un puerto […]
APLICADOR DE CLIPS DE LIGADURA, del 1 de Diciembre de 2011, de TYCO HEALTHCARE GROUP LP: Un clip de ligadura para ocluir un vaso, que comprende: al menos un clip de ligadura que tiene miembros primero y segundo de fijación, […]
 PINZA DE LIGADURA QUIRÚRGICA, del 14 de Junio de 2011, de AESCULAP AG: Pinza de ligadura quirúrgica con dos brazos de sujeción , que están unidos entre sí cada uno por uno de sus extremos mediante un punto […]
PINZA DE LIGADURA QUIRÚRGICA, del 14 de Junio de 2011, de AESCULAP AG: Pinza de ligadura quirúrgica con dos brazos de sujeción , que están unidos entre sí cada uno por uno de sus extremos mediante un punto […]
 APLICADOR DE GRAPAS QUIRURGICAS CON MORDAZAS DE ALTO APRIETE, del 4 de Noviembre de 2010, de TYCO HEALTHCARE GROUP LP: Una hoja de mordaza para la utilización en un aplicador de grapas quirúrgicas, que comprende: una primera pata y una segunda pata, cada pata con una mordaza […]
APLICADOR DE GRAPAS QUIRURGICAS CON MORDAZAS DE ALTO APRIETE, del 4 de Noviembre de 2010, de TYCO HEALTHCARE GROUP LP: Una hoja de mordaza para la utilización en un aplicador de grapas quirúrgicas, que comprende: una primera pata y una segunda pata, cada pata con una mordaza […]
 CONJUNTO DE PINZA DE FORCIPRESION DE ORGANOS TUBULARES PARA UTILIZAR EN CIRUGIA ENDOSCOPICA, del 16 de Septiembre de 2010, de UNIVERSIDAD DE ZARAGOZA.: Conjunto de pinza de forcipresión de órganos tubulares para utilizar en cirugía endoscópica.
Comprende una pinza con un primer brazo , un segundo […]
CONJUNTO DE PINZA DE FORCIPRESION DE ORGANOS TUBULARES PARA UTILIZAR EN CIRUGIA ENDOSCOPICA, del 16 de Septiembre de 2010, de UNIVERSIDAD DE ZARAGOZA.: Conjunto de pinza de forcipresión de órganos tubulares para utilizar en cirugía endoscópica.
Comprende una pinza con un primer brazo , un segundo […]
 DISPOSITIVOS ENDOSCOPICOS DE PLEGADO, del 13 de Agosto de 2010, de BAROSENSE, INC: Aparato (12g, 200) para formar pliegues en tejidos, cuyo aparato (12g, 200) comprende:
un elemento tubular alargado (16g, 204); y
una cabeza de plegado (14g, […]
DISPOSITIVOS ENDOSCOPICOS DE PLEGADO, del 13 de Agosto de 2010, de BAROSENSE, INC: Aparato (12g, 200) para formar pliegues en tejidos, cuyo aparato (12g, 200) comprende:
un elemento tubular alargado (16g, 204); y
una cabeza de plegado (14g, […]
Pieza de boca para un instrumento quirúrgico de vástago tubular, del 13 de Mayo de 2020, de AESCULAP AG: Pieza de boca para un instrumento quirúrgico de vástago tubular con un componente de sujeción , una primera rama con una primera zona de actuación […]