APARATO Y METODO PARA INSPECCION DE SUPERFICIES.
Un aparato para inspección de una superficie que comprende:
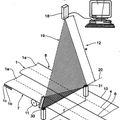
una cámara (11) que comprende un sensor lineal (13) que escanea un objeto para inspección (10) en una dirección principal de escaneo para obtener datos de la imagen (21);
un medio de subescaneo para mover la cámara (11) y el objeto para inspección (10) entre sí en una dirección de subescaneo que cruza en ángulos rectos a la dirección principal de escaneo; y
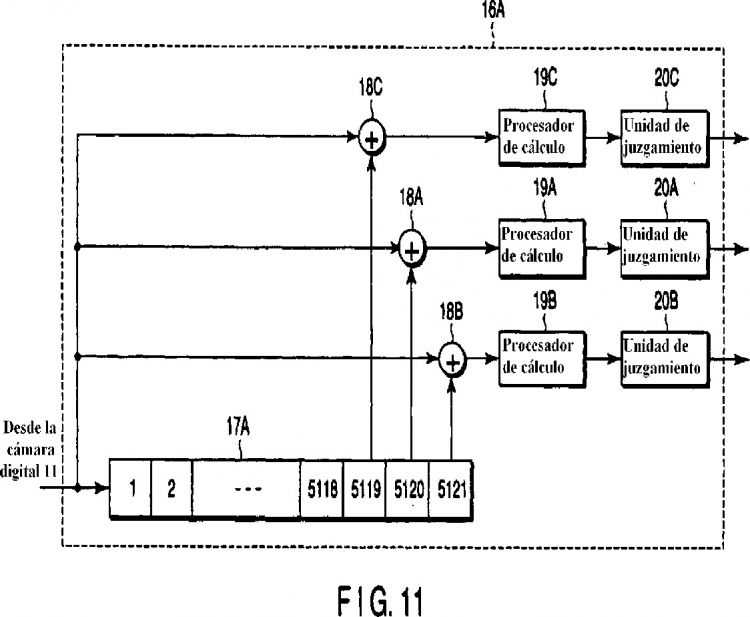
un medio de cálculo (19) para someter los datos de la imagen (21) salidos de la cámara (11) a un proceso de cálculo para inspeccionar el estado de una superficie del objeto para inspección (10),
un medio de generación de una cadena de datos de una imagen para generar una cadena de datos de una imagen (22); y
medios de juzgamiento (20, 20A - 20C) para utilizar la cadena de datos de la imagen (22) para inspeccionar el estado de la superficie del objeto para inspección (10),
en donde los medios de juzgamiento (20, 20A - 20C) comprenden
medios de acumulación (33, 34) para añadir los datos de la imagen (21) en un bloque que incluye una pluralidad de píxeles continuos en la dirección principal de escaneo en la cadena de datos de la imagen (22) para calcular los datos añadidos en el bloque;
un medio de correlación (35) para calcular un valor correlacionado de los datos añadidos en bloque de los bloques adyacentes entre sí en la dirección principal de escaneo, en donde se obtiene el valor correlacionado obteniendo una diferencia o una relación entre los datos adyacentes añadidos en bloque, y
medios para juzgar el valor correlacionado con un valor de umbral, y
en donde los medios de juzgamiento (20, 20A - 20C) cambian el bloque en la dirección principal de escaneo para que cada píxel repita la adición en bloque y el cálculo de correlación,
caracterizada porque
el medio de generación de la cadena de datos de la imagen se adapta para añadir los datos de la imagen (21) de dos líneas principales de escaneo adyacentes entre sí en la dirección de subescaneo, y
para añadir los datos de la imagen (21) de píxeles en la misma posición en la dirección principal de escaneo en los datos de la imagen (21) de dos líneas principales de escaneo adyacentes entre sí en la dirección de subescaneo
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/JP02/06856.
Solicitante: YAMADA, YOSHIRO.
Nacionalidad solicitante: Japón.
Dirección: 2-5-13, KAKINOKIZAKA, MEGURO-KU,TOKYO 152-0022.
Inventor/es: YAMADA, YOSHIRO.
Fecha de Publicación: .
Fecha Concesión Europea: 27 de Enero de 2010.
Clasificación Internacional de Patentes:
- G01N21/89B
Clasificación PCT:
- G01N21/88 FISICA. › G01 METROLOGIA; ENSAYOS. › G01N INVESTIGACION O ANALISIS DE MATERIALES POR DETERMINACION DE SUS PROPIEDADES QUIMICAS O FISICAS (procedimientos de medida, de investigación o de análisis diferentes de los ensayos inmunológicos, en los que intervienen enzimas o microorganismos C12M, C12Q). › G01N 21/00 Investigación o análisis de los materiales por la utilización de medios ópticos, es decir, utilizando rayos infrarrojos, visibles o ultravioletas (G01N 3/00 - G01N 19/00 tienen prioridad). › Investigación de la presencia de grietas, de defectos o de manchas.
- G01N21/89 G01N 21/00 […] › en un material móvil, p. ej. del papel, de tejidos (G01N 21/90, G01N 21/91, G01N 21/94 tienen prioridad).
Clasificación antigua:
- G01N21/88 G01N 21/00 […] › Investigación de la presencia de grietas, de defectos o de manchas.
Fragmento de la descripción:
Aparato y método para inspección de superficies.
Campo técnico
La invención se relaciona con un aparato y con un método para inspección de superficies en la cual se utiliza una cámara que incluye un sensor de imagen para llevar a cabo la inspección de defectos presentes en una superficie, incluidos daños, polvo y similares de diferentes objetos para inspección tal como artículos moldeados.
Estado del Arte
En el estado del arte relacionado, por ejemplo, en la inspección de defectos de superficie de objetos para inspección tales como artículos comprimidos, artículos estirados, y artículos laminados, se han utilizado previamente cámaras tales como la cámara CCD. La cámara CCD incluye un sensor de imágenes en línea constituido por dispositivos de conversión fotoeléctricos dispuestos en una dimensión (sensor de imágenes en línea). La cámara escanea en una dimensión el objeto para inspección, y los datos de las imágenes obtenidas en esta forma se someten a proceso de cálculo y se inspeccionan.
En un sensor bidimensional de imágenes para uso en cámaras de vídeo, en general, existen únicamente varios cientos de píxeles que recogen la imagen en dirección a lo ancho del campo de visión. Por otro lado, en un sensor de imágenes en línea, es posible integrar varios miles de píxeles que recogen la imagen en dirección a lo ancho del campo de visión. Por lo tanto, un sensor de imágenes en línea puede llevar a cabo la inspección de la superficie de objetos anchos para inspección tales como acero, papel, y película, lo cual es imposible con un sensor bidimensional de imágenes.
En el sensor de imágenes del dispositivo fotoeléctrico de conversión de este tipo de cámara, existe una variación en la precisión de la lectura. Esta variación es causada por una diferencia en la sensibilidad de cada dispositivo fotoeléctrico de conversión que constituye el sensor de imágenes, y se conoce como dispersión del dispositivo, este valor s generalmente aproximadamente del 3%. En el aparato para inspección de superficies relacionado con el arte descrito anteriormente, a menos que exista un cambio de brillo que exceda la dispersión del dispositivo, no se pueden detectar los defectos finos. Se dice que la precisión de la detección visual luz/sombra está en un rango de 1/1500 a 1/2000, por consiguiente un aparato para inspección de superficies que utiliza el sensor de imágenes en línea tiene una precisión únicamente de 1/60 con respecto a aquella de la inspección visual, y se ha asumido que es imposible remplazar las inspecciones visuales.
Por lo tanto, se han considerado diferentes métodos para compensar la dispersión del dispositivo del sensor de imágenes. Un ejemplo de una técnica es conocido como compresión: la adición de datos de la imagen de un bloque que incluye una pluralidad de píxeles que son continuos en la dirección principal de escaneo en una cadena de datos de la imagen obtenida por el sensor de imágenes en línea; y llevar a cabo un cálculo de correlación de los datos añadidos de bloques adyacentes.
Sin embargo, se puede detectar en este método un defecto que se extiende sobre los píxeles adyacentes entre sí en una línea principal de escaneo, pero es imposible detectar un defecto que se extiende sobre líneas principales adyacentes de escaneo, y un defecto que se extiende sobre los píxeles adyacentes entre sí sobre la línea principal de escaneo y que se extiende también sobre las líneas adyacentes principales de escaneo. Por lo tanto, ha existido una limitación en la mejora de la precisión de la inspección.
El documento US-B1-6 208 417 describe un método y un aparato para inspeccionar una superficie de un artículo objetivo capaz de detectar en forma precisa manchas o defectos en miniatura presentes en la superficie objetivo. El método comprende las etapas de: obtener informaciones de brillo para una pluralidad de píxeles distribuidos en dos dimensiones tomando una imagen de la superficie del artículo; encontrar manchas sobre la superficie del artículo en respuesta a cada información obtenida en la etapa de ganancia de información de brillo para producir una primera salida; encontrar defectos miniatura menores en tamaño que un píxel unitario en respuesta a cada información obtenida en la etapa de ganancia de información de brillo para generar una segunda salida; conmutar la primera salida y la segunda salida dentro de las señales eléctricas apropiadas en una forma controlada; y mostrar las señales eléctricas conmutadas sobre una pantalla en una forma observable.
El documento US-A-5 990 468 describe un dispositivo para la detección automática e inspección de defectos sobre una red en ejecución, que incluye un motor que mueve la red y la cámara eléctrica que alimenta una señal que representa una imagen de la red formada sobre un sensor de imágenes que tiene puntos sensibles a la luz. El dispositivo tiene sincronización de la duración de un número predeterminado de campos sucesivos de pasos de la red a través del campo óptico de la cámara y la duración que separa el inicio de dos operaciones sucesivas de formación de imágenes de la cámara. De este modo, se lleva a cabo un filtrado óptico. De una imagen a la siguiente, el mismo punto fotosensible del sensor corresponde a porciones idénticas de filamentos e intersticios de la red, de modo que se detecta cualquier variación óptica de los filamentos o intersticios. Las señales que representan las imágenes producidas por cada punto fotosensible durante disparos sucesivos corresponden a zonas de material con diseño similar.
El documento US-A-5 068 799 describe un método y un aparato para detectar fallas en un material de red continua iluminado por una fuente de luz y escaneado ópticamente para producir una imagen electrónica digitalizada de dicho material. Los datos de la imagen digitalizada representativos del material de red continua se almacenan en la memoria. Los datos de la imagen se aplican también a un procesador digital de señal que identifica áreas de la imagen que representan áreas imperfectas potenciales del material de red continua. Se emplean una variedad de filtros que coinciden en el espacio para detectar las imperfecciones. La información relacionada con la ubicación de las imperfecciones potenciales se transfiere a un ordenador que analiza en detalle porciones de la imagen almacenada en la vecindad de las áreas identificadas.
Un objetivo de la presente invención es el de proporcionar un aparato y un método para inspección de superficies en los cuales es posible detectar defectos sobre un objeto para inspección, tal como un defecto que se extiende sobre líneas adyacentes principales de escaneo o un defecto que se extiende sobre píxeles adyacentes entre sí sobre la línea principal de escaneo y que se extiende también sobre las líneas adyacentes principales de escaneo, y en las cuales el estado de una superficie se puede inspeccionar con buena precisión.
El objetivo se resuelve por medio de las características de las reivindicaciones independientes. Las reivindicaciones dependientes están dirigidas a modalidades preferidas de la invención.
Breve descripción de los dibujos
La Fig. 1 es un diagrame de bloques que muestra la constitución de un aparato para inspección de una superficie de acuerdo con una primera modalidad de la presente invención;
La Fig. 2 es una vista explicativa de una operación para añadir los datos de una imagen de dos líneas principales de escaneo adyacentes entre sí en una dirección de subescaneo para generar una cadena de datos de una imagen en la primera modalidad;
La Fig. 3 es un diagrama de bloques que muestra la constitución de un procesador de cálculo en la primera modalidad;
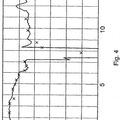
La Fig. 4 es una vista explicativa de una operación del procesador de cálculo mostrado en la Fig. 3;
Las Figs. 5A, 5B y 5C son vistas explicativas de diferentes defectos sobre un objeto para inspección;
Las Figs. 6A y 6B son diagramas que muestran una relación del defecto que existe únicamente en una línea principal de escaneo y los correspondientes datos de la imagen y los datos añadidos en un bloque;
Las Figs. 7A y 7B son diagramas que muestran una relación del defecto que existe sobre dos líneas adyacentes principales de escaneo y los correspondientes datos añadidos en el bloque;
Las Figs. 8A y 8B son diagramas que muestran una relación del defecto que se extiende sobre píxeles adyacentes entre sí sobre la línea principal de escaneo y se extiende también sobre...
Reivindicaciones:
1. Un aparato para inspección de una superficie que comprende:
2. El aparato para inspección de una superficie de acuerdo con la reivindicación 1, en donde el medio para generación de una cadena de datos de la imagen añade los datos de la imagen (21) de cuatro píxeles adyacentes entre sí en la dirección de subescaneo y en la dirección principal de escaneo en los datos de la imagen (21) de dos líneas principales de escaneo adyacentes entre sí en la dirección de subescaneo para obtener la cadena de datos de la imagen (22A).
3. El aparato para inspección de una superficie de acuerdo con cualquiera de las reivindicaciones 1 a 2, en donde el medio para generación de una cadena de datos de la imagen comprende:
4. El aparato para inspección de una superficie de acuerdo con la reivindicación 1, en donde el medio para generación de la cadena de datos de la imagen añade los datos de la imagen (21) de píxeles en la misma posición en la dirección principal de escaneo en los datos de la imagen (21) de dos líneas principales de escaneo adyacentes entre sí en la dirección de subescaneo para generar una primera cadena de datos de la imagen (2), añadir los datos de la imagen (21) de dos píxeles adyacentes entre sí en una primera dirección que es oblicua con respecto a la dirección de subescaneo en los datos de la imagen (21) de dos líneas principales de escaneo adyacentes entre sí en la dirección de subescaneo para generar una segunda cadena de datos de la imagen (22), y añade los datos de la imagen (21) de dos píxeles adyacentes entre sí en una segunda dirección que es oblicua con respecto a la dirección de subescaneo en los datos de la imagen (21) de dos líneas principales de escaneo adyacentes entre sí en la dirección de subescaneo para generar una tercera cadena de datos de la imagen (22).
5. El aparato para inspección de una superficie de acuerdo con la reivindicación 4, en donde el medio para generación de la cadena de datos de la imagen comprende:
6. El aparato para inspección de una superficie de acuerdo con cualquiera de las reivindicaciones 1 a 5, en donde el medio de subescaneo mueve al objeto para inspección (10) en la dirección de subescaneo con respecto a la cámara (11).
7. El aparato para inspección de una superficie de acuerdo con cualquiera de las reivindicaciones 1 a 5, en donde el medio de subescaneo mueve la cámara (11) en la dirección de subescaneo con respecto al objeto para inspección (10).
8. El aparato para inspección de una superficie de acuerdo con cualquiera de las reivindicaciones 1 a 5, en donde el medio de subescaneo mueve una lente de la cámara (11) en la dirección de subescaneo con respecto al sensor en línea (13).
9. El aparato para inspección de una superficie de acuerdo con cualquiera de las reivindicaciones 1 a 5, en donde el medio de subescaneo mueve una lente y el sensor de imágenes de la cámara (11) en la dirección de subescaneo con respecto al objeto para inspección (10).
10. Un método para inspección de una superficie utilizando una cámara (11) que comprende un sensor en línea (13) que escanea un objeto para inspección en una dirección principal de escaneo para obtener datos de la imagen, comprendiendo el método:
Patentes similares o relacionadas:
 DISPOSITIVO PARA DETERMINAR LA PRECISIÓN DEL FORMATO DE UNA BANDA DE CARTÓN ONDULADO, del 20 de Enero de 2011, de BHS CORRUGATED MASCHINEN- UND ANLAGENBAU GMBH: Dispositivo para la determinación de la precisión del formato de una banda de cartón ondulado que se desplaza en una dirección de transporte , […]
DISPOSITIVO PARA DETERMINAR LA PRECISIÓN DEL FORMATO DE UNA BANDA DE CARTÓN ONDULADO, del 20 de Enero de 2011, de BHS CORRUGATED MASCHINEN- UND ANLAGENBAU GMBH: Dispositivo para la determinación de la precisión del formato de una banda de cartón ondulado que se desplaza en una dirección de transporte , […]
 DISPOSITIVO PARA LA EMISION DE LUZ DE TIPO LINEAL, del 9 de Diciembre de 2010, de TEXMAG GMBH VERTRIEBSGESELLSCHAFT: Dispositivo para la emisión de luz, que comprende: un travesaño , y unidades dispuestas de manera lineal para la irradiación de luz, presentando […]
DISPOSITIVO PARA LA EMISION DE LUZ DE TIPO LINEAL, del 9 de Diciembre de 2010, de TEXMAG GMBH VERTRIEBSGESELLSCHAFT: Dispositivo para la emisión de luz, que comprende: un travesaño , y unidades dispuestas de manera lineal para la irradiación de luz, presentando […]
 PROCEDIMIENTO DE CARACTERIZACION EN LINEA DE UNA SUPERFICIE EN MOVIMIENTO Y DISPOSITIVO PARA SU PUESTA EN PRACTICA, del 18 de Marzo de 2010, de CENTRE DE RECHERCHES METALLURGIQUES - CENTRUM VOOR DE RESEARCH IN DE METALLURGIE: Procedimiento de caracterización en línea de una superficie (S) en movimiento, preferentemente una chapa galvanizada, que utiliza principalmente:
- […]
PROCEDIMIENTO DE CARACTERIZACION EN LINEA DE UNA SUPERFICIE EN MOVIMIENTO Y DISPOSITIVO PARA SU PUESTA EN PRACTICA, del 18 de Marzo de 2010, de CENTRE DE RECHERCHES METALLURGIQUES - CENTRUM VOOR DE RESEARCH IN DE METALLURGIE: Procedimiento de caracterización en línea de una superficie (S) en movimiento, preferentemente una chapa galvanizada, que utiliza principalmente:
- […]
Método y dispositivo de medida de planicidad de un producto metálico, del 3 de Junio de 2020, de Primetals Technologies Austria GmbH: Metodo de medida de planicidad de un producto metalico, en forma o bien de una banda o bien de una placa de una linea de tratamiento metalurgico, dicho producto […]
Dispositivo de disco contador, del 6 de Mayo de 2020, de GTS GmbH: Dispositivo para el procesamiento de hojas dispuestas en una fila que comprende - un dispositivo base para acoplar a un dispositivo de vacío para la generación de […]
Sistema de detección de defectos en uniones encoladas y procedimiento de detección de defectos en uniones encoladas, del 18 de Diciembre de 2019, de YOSHINO GYPSUM CO., LTD: Un sistema de detección de defecto de la unión encolada, que se proporciona en un aparato de producción de placas de yeso y que detecta el defecto […]
MARCADOR DE DESGASTE PARA OBJETOS, del 17 de Diciembre de 2019, de NAYCO MANAGEMENT, S.L: 1. Marcador de desgaste para objetos susceptibles a desgastarse por el uso y/o lavado y liberando elementos al medio ambiente que, comprendiendo un elemento con una estructura […]
SISTEMA PARA LA VERIFICACIÓN DE BOLSAS, MÁQUINA DE INSPECCIÓN VISUAL DE BOLSAS Y MÁQUINA TRANSPORTADORA DE BOLSAS, del 20 de Junio de 2019, de LAPEYRA Y TALTAVULL COMERCIAL, S.L: Sistema de verificación de bolsas, máquina de inspección visual de bolsas y máquina transportadora de bolsas, que comprende una primera fase en la que […]