Aparato y método de carril flexible reconfigurable.
Un aparato que comprende:
un sistema (304) de carril flexible,
que comprende un carril flexible y que es capaz de ser fijado a unasuperficie de trabajo;
un carro (306) multieje acoplado al sistema de carril flexible, en el que el carro multieje es capaz demoverse a lo largo del sistema de carril flexible y es capaz de mover una herramienta en unos ejes conrespecto a la superficie de trabajo;
un módulo (308) de herramienta capaz de ser acoplado, de manera desmontable, al carro multieje, en elque el módulo de herramienta comprende un bastidor y la herramienta, en el que la herramienta estámontada sobre el bastidor y está ubicada en un primer lado del módulo de herramienta, y el módulo deherramienta incluye una unidad (328) de reacción situada en un segundo lado del módulo de herramienta yes capaz de estabilizar el carro multieje durante el funcionamiento de la herramienta;
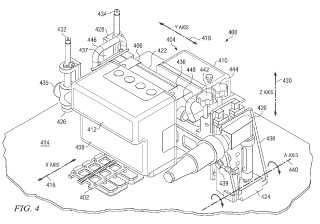
una pata (424) de presión situada en el primer lado y capaz de aplicar presión a la superficie de trabajo; y
caracterizado por
un conjunto de rodillos (348) asociados con la pata de presión para proporcionar una estabilidad adicional alcarro multieje cuando es movido a lo largo del carril flexible.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2009/048294.
Solicitante: THE BOEING COMPANY.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 100 NORTH RIVERSIDE PLAZA CHICAGO, IL 60606-2016 ESTADOS UNIDOS DE AMERICA.
Inventor/es: MURPHY, JAMES, C., MERKLEY,ALAN,R, REID,ERIC M.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B23Q9/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B23 MAQUINAS-HERRAMIENTAS; TRABAJO DE METALES NO PREVISTO EN OTRO LUGAR. › B23Q PARTES CONSTITUTIVAS, DISPOSITIVOS O ACCESORIOS DE MAQUINAS HERRAMIENTAS, p. ej. DISPOSITIVOS PARA COPIAR O CONTROLAR (herramientas del tipo utilizado en tornos o máquinas de agujerear B23B 27/00 ); MAQUINAS HERRAMIENTAS DE UTILIZACION GENERAL, CARACTERIZADAS POR LA ESTRUCTURA DE CIERTAS PARTES CONSTITUTIVAS O DISPOSITIVOS; COMBINACIONES O ASOCIACIONES DE MAQUINAS PARA TRABAJAR EL METAL NO DESTINADAS A UN TRABAJO EN PARTICULAR. › Dispositivos para el soporte o el guiado de aparatos o máquinas portátiles para el trabajo del metal (para el aterrajado de tubos B23B 41/08; especialmente concebidos para la perforación B23B 45/14).
PDF original: ES-2401542_T3.pdf
Fragmento de la descripción:
Aparato y método de carril flexible reconfigurable.
INFORMACIÓN DE ANTECEDENTES
1. Campo: La presente descripción se refiere, en general, a la fabricación y, en particular, a herramientas de fabricación y automatización. Todavía más particularmente, la presente descripción se refiere a herramientas montadas sobre carriles usadas para la fabricación.
2. Antecedentes: La fabricación de aeronaves puede implicar el alineamiento de diferentes componentes sobre estructuras y/u otros componentes. Pueden perforarse orificios a través de estas partes alineadas para prepararlas para fijar las partes entre sí. Las piezas pueden ser fijadas usando elementos de fijación tales como, por ejemplo, sin limitación, remaches, tornillos, pernos y otros elementos de fijación adecuados. La creación de estos orificios puede ser realizada manualmente o por medio de máquinas herramientas.
Estas máquinas herramientas pueden comprender un aparato robótico que puede moverse con respecto a las partes alineadas y puede taladrar los orificios deseados. Frecuentemente, estos tipos de herramientas pueden requerir un espacio de suelo considerable y grandes costos de inversión, y pueden tener límites sobre la eficiencia, ya que estos tipos de herramientas sólo pueden perforar un orificio cada vez. Además, la cantidad y/o los tipos de trabajo que se pueden realizar usando estos tipos de herramientas pueden reducirse en base a las zonas de seguridad requeridas.
Otros tipos de máquinas herramientas incluyen herramientas flexibles más pequeñas, tales como, por ejemplo, sin limitación, herramientas sobre carriles flexibles. Estos tipos de herramientas pueden incluir carriles fijados a las partes. Por ejemplo, con el fuselaje, un sistema de carril puede ser fijado al fuselaje con una herramienta de perforación que se mueve a lo largo del carril para taladrar los orificios deseados. Estos tipos de sistemas de carril flexible pueden proporcionar costos de equipo y de implementación más bajos. Además, estos tipos de sistemas pueden permitir también un tiempo de configuración más corto y la capacidad de perforar orificios con muchos tipos de contornos superficiales.
Los sistemas de carril disponibles actualmente pueden tener la forma de un sistema de doble carril. Con el sistema de doble carril, la fijación y el mantenimiento de los carriles usando una configuración en paralelo con unas dimensiones de separación deseadas entre los carriles puede ser difícil dependiendo de la curvatura de la superficie del objeto sobre la que pueden realizarse las operaciones de perforación.
Además, una vez realizada una operación de perforación, puede aplicarse un sellador y/o elementos de fijación a los orificios usados para sujetar los componentes entre sí. Este tipo de operación puede requerir la retirada de los carriles y de la unidad y la colocación de un nuevo conjunto de carriles y una unidad sobre el fuselaje. En algunos sistemas, la unidad antigua puede ser sacada fuera del carril y una nueva unidad con la herramienta adecuada puede ser acoplada al carril. Este tipo de procedimiento puede requerir mucho tiempo, y puede ser también más costoso si se duplican los sistemas de carril y/o las unidades para operaciones diferentes.
Por consiguiente, existe una necesidad de un método y un aparato para minimizar las limitaciones descritas anteriormente.
El documento US 2005/265798A1 se refiere a una máquina herramienta con carril flexible que se acopla temporalmente a una estructura mediante copas de vacío y posiciona un cabezal de herramienta en cualquier punto deseado sobre una zona. El cabezal de herramienta puede realizar operaciones tales como perforación, inserción de pernos y adquisición de datos dimensionales. El carril flexible puede conformarse a la curvatura de la superficie en uno o más ejes. La perpendicularidad del cabezal de herramienta con respecto a la estructura puede detectarse y ajustarse según sea necesario. La posición fijada del carril puede ser compensada mediante una transformación de coordenadas, lo que permite que los orificios, por ejemplo, sean colocados con precisión considerable. Este documento forma la base para el preámbulo de las reivindicaciones 1 y 10.
La presente invención se expone en las reivindicaciones independientes, con algunas características opcionales expuestas en las reivindicaciones dependientes de las mismas.
COMPENDIO Las realizaciones ventajosas de la presente invención pueden proporcionar un método y un aparato para realizar operaciones sobre una pieza de trabajo. En una realización, un aparato puede comprender un sistema de carril flexible y un carro multieje. El sistema de carril flexible puede ser capaz de ser fijado a una superficie de trabajo. El carro multieje puede ser acoplado al sistema de carril flexible. El carro multieje puede ser capaz de moverse a lo largo del sistema de carril flexible y puede ser capaz de mover una herramienta en unos ejes con respecto a la superficie de trabajo.
En otra realización ventajosa, un aparato puede estar presente para realizar operaciones sobre una pieza de trabajo. Un carril de vacío, flexible, puede ser capaz de ser fijado a una superficie de trabajo curvada de la pieza de trabajo. Un carro multieje puede ser acoplado, de manera desmontable, al sistema de carril flexible. El carro multieje puede ser capaz de moverse a lo largo del sistema de carril flexible y puede ser capaz de mover una herramienta en unos ejes con respecto a la superficie de trabajo curvada. El carro multieje puede comprender un primer motor capaz de mover el carro multieje sobre el carril flexible a lo largo de un eje X en los ejes. Un segundo motor puede ser capaz de mover la herramienta en el módulo de herramienta a lo largo de un eje Y de los ejes. Un módulo de herramienta puede ser capaz de ser acoplado, de manera desmontable, al carro multieje y puede comprender un bastidor. La herramienta puede estar montada sobre el bastidor. La herramienta puede estar situada en un primer lado del módulo de herramienta. La herramienta puede ser seleccionada de al menos uno de entre un taladro, una sonda de medición, una remachadora, una fresadora, una sierra de corte, una rueda de esmeril y un elemento de fijación. Una pata de presión puede estar situada en el primer lado y puede ser capaz de aplicar presión a la superficie de trabajo curvada. La pata de presión puede ser giratoria alrededor de un eje A paralelo al eje X, y puede ser capaz de proporcionar una fuerza que es normal a la superficie de trabajo curvada. Una unidad de reacción puede estar situada en un segundo lado del módulo de herramienta, y puede ser capaz de estabilizar el carro multieje durante el funcionamiento de la herramienta y mientras el carro multieje se mueve a lo largo del carril flexible. La unidad de reacción puede comprender al menos uno de entre un conjunto de patas fijas y un conjunto de rodillos.
En todavía otra realización ventajosa de la presente invención, un método está presente para realizar una operación sobre una pieza de trabajo. Un carril de vacío puede ser fijado con un carro multieje acoplado, de manera desmontable, al carril
de vacío a una superficie de una pieza de trabajo. Un módulo de herramienta puede ser acoplado al carro multieje. El módulo de herramienta puede tener una herramienta capaz de realizar la operación. El carro multieje puede moverse a lo largo del carril de vacío, flexible, a una ubicación sobre la pieza de trabajo. La operación puede ser realizada en la ubicación.
En todavía otra realización ventajosa, un método para realizar una operación sobre una pieza de trabajo de una aeronave puede comprender un carril de vacío, flexible, y un módulo de herramienta. El carril de vacío, flexible, con un carro multieje acoplado, de manera desmontable, al carril de vacío, flexible, puede ser fijado a una superficie de la pieza de trabajo de una aeronave. El módulo de herramienta puede ser acoplado al carro multieje y puede tener una herramienta capaz de realizar la operación. El carro multieje puede moverse a lo largo del carril de vacío, flexible, a una ubicación sobre la pieza de trabajo de una aeronave. Puede aplicarse una fuerza contra la superficie con una pata de presión situada en un primer lado del módulo de herramienta. La pata de presión puede ser giratoria alrededor de un eje paralelo a un eje de movimiento del carro multieje. La fuerza puede ser normal a la superficie. Una fuerza de reacción puede ser proporcionada a la fuerza con una unidad de reacción localizada en un segundo lado del módulo de herramienta. La operación puede ser realizada una vez aplicadas la fuerza y la fuerza de reacción. La operación puede seleccionarse de entre al menos una operación de... [Seguir leyendo]
Reivindicaciones:
1. Un aparato que comprende:
un sistema (304) de carril flexible, que comprende un carril flexible y que es capaz de ser fijado a una superficie de trabajo; un carro (306) multieje acoplado al sistema de carril flexible, en el que el carro multieje es capaz de moverse a lo largo del sistema de carril flexible y es capaz de mover una herramienta en unos ejes con respecto a la superficie de trabajo;
un módulo (308) de herramienta capaz de ser acoplado, de manera desmontable, al carro multieje, en el que el módulo de herramienta comprende un bastidor y la herramienta, en el que la herramienta está montada sobre el bastidor y está ubicada en un primer lado del módulo de herramienta, y el módulo de herramienta incluye una unidad (328) de reacción situada en un segundo lado del módulo de herramienta y es capaz de estabilizar el carro multieje durante el funcionamiento de la herramienta;
una pata (424) de presión situada en el primer lado y capaz de aplicar presión a la superficie de trabajo; y
caracterizado por
un conjunto de rodillos (348) asociados con la pata de presión para proporcionar una estabilidad adicional al carro multieje cuando es movido a lo largo del carril flexible.
2. El aparato según la reivindicación 1, en el que la unidad de reacción es capaz de estabilizar el carro multieje mientras el carro multieje se mueve a lo largo del carril flexible.
3. El aparato según la reivindicación 1, en el que la unidad de reacción comprende al menos uno de entre un conjunto de patas y un conjunto de rodillos. 25
4. El aparato según la reivindicación 1, en el que el carro multieje comprende:
un primer motor que es capaz de mover el carro multieje sobre el carril flexible a lo largo de un eje X en los ejes. 30
5. El aparato según la reivindicación 4, en el que el carro multieje comprende además:
un segundo motor capaz de mover la herramienta en el módulo de herramienta a lo largo de un eje Y.
6. El aparato según la reivindicación 5, en el que la pata de presión es giratoria alrededor de un eje A que es paralelo al eje X y puede ser movido para hacer contacto con la superficie de trabajo.
7. El aparato según la reivindicación 1, en el que la pata de presión es capaz de proporcionar una fuerza que es normal a la superficie de trabajo. 40
8. El aparato según la reivindicación 1, en el que la pata de presión está dispuesta para acoplarse a la superficie de trabajo usando un vacío.
9. El aparato según la reivindicación 1, en el que la superficie de trabajo comprende una superficie curvada, y en el
que el sistema de carril flexible está dispuesto sobre la superficie curvada, la pata de presión está dispuesta para su fijación a un carro de pata de presión, y la unidad de reacción comprende rodillos de reacción; y en el que el carro de pata de presión y los rodillos de reacción forman un ángulo para adaptarse a los contornos en la superficie curvada.
10. Un método para realizar una operación sobre una pieza de trabajo, comprendiendo el método:
fijar un carril de vacío flexible, con un carro multieje acoplado al carril de vacío, a una superficie de una pieza de trabajo; acoplar un módulo (308) de herramienta al carro multieje, en el que el módulo de herramienta tiene una 55 herramienta capaz de realizar la operación; mover el carro (306) multieje a lo largo del carril de vacío, flexible, a una ubicación sobre la pieza de trabajo; aplicar una fuerza contra la superficie con una unidad (424) de presión situada sobre un primer lado del módulo de herramienta; proporcionar una fuerza de reacción contraria a la fuerza con una unidad (328) de reacción situada en un 60 segundo lado del módulo de herramienta, y realizar la operación en la ubicación, estando caracterizado por que la unidad de presión comprende un conjunto de rodillos (348) asociados con la unidad de presión.
11. El método según la reivindicación 10, en el que la unidad de presión es giratoria alrededor de un eje paralelo a un eje de movimiento del carro multieje y en el que la fuerza es normal a la superficie, y 5 la operación se realiza una vez aplicadas la fuerza y la fuerza de reacción.
12. El método según la reivindicación 11, en el que la operación se selecciona de entre al menos uno de una operación de perforación, una operación de sellado, una operación de medición y una operación de fijación.
Patentes similares o relacionadas:
Máquina y método de procesamiento de superficies herméticas, del 22 de Abril de 2020, de Mitsubishi Hitachi Power Systems, Ltd: Una máquina de procesamiento de superficies herméticas (1; 1A; 1B; 1C) para realizar el corte de una superficie de unión de un miembro hermético en un cuerpo […]
Sistema de oruga de marco pequeño, del 20 de Noviembre de 2019, de THE BOEING COMPANY: Aparato que comprende: un sistema de herramienta configurado para realizar una operación en una ubicación en una estructura […]
Unidad de mecanización con carro móvil, del 7 de Agosto de 2019, de Watch Out SA: Unidad de mecanización que comprende por lo menos un módulo de mecanización , comprendiendo dicho módulo de mecanización […]
Métodos y aparatos para operaciones de fabricación, del 22 de Mayo de 2019, de THE BOEING COMPANY: Un aparato para realizar una operación de fabricación de una pieza de trabajo, comprendiendo el aparato: un conjunto de oruga adaptado […]
Robot oruga y plataforma de soporte, del 15 de Mayo de 2019, de THE BOEING COMPANY: Aparato que comprende un sistema de oruga y un robot oruga, comprendiendo el robot oruga: un primer sistema de movimiento configurado para […]
Equipo de fresado así como procedimiento para llevar a cabo un mecanizado de fresado en el interior de una ranura, del 15 de Mayo de 2019, de SIEMENS AKTIENGESELLSCHAFT: Equipo de fresado con una herramienta de fresado que rota alrededor de un eje de giro de herramienta , presentando el equipo de fresado un cuerpo […]
Herramienta eléctrica, del 25 de Abril de 2019, de POWER BOX AG: Una herramienta eléctrica que incluye una carcasa y una base , dicha carcasa montada para ser móvil con respecto y separarse de la base, dicha […]
Dispositivo y procedimiento para rectificar un segmento de torre de hormigón de una turbina eólica, del 11 de Marzo de 2019, de Wobben Properties GmbH: Dispositivo de rectificado para el rectificado de un borde de segmento superior de un segmento de torre de una torre de hormigón para preparar el segmento de torre […]