Aparato tolerante a fallos y procedimiento para determinar una velocidad de revolución de un engranaje.
Aparato para determinar una velocidad de revolución para un engranaje,
que comprende:
un detector (710) de flancos, configurado el detector (710) de flancos para recibir una señal de entrada procedente de un sensor (110) y una contraseñal, la señal de entrada correspondiente a una señal asociada con un engranaje (10) giratorio que tiene una pluralidad de dientes del engranaje, cada diente del engranaje de la pluralidad de dientes del engranaje correspondiente a una transición de flanco de la señal de entrada, el detector de flancos configurado además para enviar una pluralidad de valores de tiempo en base a la señal de entrada y la contraseñal, estando cada valor de tiempo de la pluralidad de valores de tiempo asociado únicamente con una transición de flanco detectada a partir de la señal de entrada;
una memoria (720) acoplada al detector de flancos, configurada la memoria para recibir desde el detector de flancos la pluralidad de valores de tiempo, estando la memoria configurada para almacenar la pluralidad de valores de tiempo;
un motor (730) de impulsos de entrada acoplado a la memoria (720), configurado el motor (730) de impulsos de entrada para calcular una pluralidad de demoras de impulso a impulso en base a la pluralidad de valores de tiempo almacenados en la memoria (720), y
un procesador (150, 160, 170) principal configurado para determinar la velocidad de revolución para el engranaje mediante el cálculo de una tasa de impulsos en base a las demoras de impulso a impulso.
caracterizado por
un módulo (130) de impulsos de entrada que comprende el detector (710) de flancos, la memoria (720) y el motor (730) de impulsos de entrada, y
un dispositivo (180) de entrada acoplado al módulo (130) de impulsos de entrada, configurado el dispositivo (180) de entrada para proporcionar la información del sensor recibida desde un usuario al módulo (130) de impulsos de entrada, comprendiendo la información del sensor uno o más de un indicador del tipo de sensor, un indicador de del número de dientes del engranaje, un indicador del tipo de flanco y un indicador del campo de tensión de sensor activo.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2003/013579.
Solicitante: INVENSYS SYSTEMS, INC.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 15345 BARRANCA PKWY IRVINE, CA 92618-2501 ESTADOS UNIDOS DE AMERICA.
Inventor/es: BROWN,DAVID R, MEYER,MATTHEW C, MISHRA,AJAY P, NORRIS,JEFFREY A, RASMUSSEN,DAVID C.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01P3/489 FISICA. › G01 METROLOGIA; ENSAYOS. › G01P MEDIDA DE VELOCIDADES LINEALES O ANGULARES, DE LA ACELERACION, DECELERACION O DE CHOQUES; INDICACION DE LA PRESENCIA, AUSENCIA DE MOVIMIENTO; INDICACION DE DIRECCIÓN DE MOVIMIENTO (midiendo la velocidad angular utilizando efectos giroscópicos G01C 19/00; dispositivos de medida combinados para medir dos o más variables de un movimiento G01C 23/00; medida de la velocidad del sonido G01H 5/00; medida de la velocidad de la luz G01J 7/00; medida de la dirección o de la velocidad de objetos sólidos por reflexión o reradiación de ondas radio u otras ondas basada en los efectos de propagación, p. ej. el efecto Doppler, el tiempo de propagación, la dirección de propagación, G01S; medida de la velocidad de radiaciones nucleares G01T). › G01P 3/00 Medida de la velocidad lineal o angular; Medida de diferencias de velocidades lineales o angulares (G01P 5/00 - G01P 11/00 tienen prioridad; midiendo la velocidad angular utilizando efectos giroscópicos G01C 19/00). › Circuitos digitales a este efecto.
- G01R25/00 G01 […] › G01R MEDIDA DE VARIABLES ELECTRICAS; MEDIDA DE VARIABLES MAGNETICAS (indicación de la sintonización de circuitos resonantes H03J 3/12). › Dispositivos para realizar medidas del ángulo de fase entre una corriente y una tensión, o entre tensiones o entre corrientes.
- G06F19/00
PDF original: ES-2525874_T3.pdf
Fragmento de la descripción:
Aparato tolerante a fallos y procedimiento para determinar una velocidad de revolución de un engranaje La invención se refiere en general a mediciones de alta precisión y, más particularmente, a un sistema tolerante a fallos y procedimiento para determinar con precisión una velocidad de revolución de un engranaje giratorio. Los sistemas de medición conocidos pueden medir la velocidad de revolución de un engranaje giratorio en base al tiempo transcurrido para un punto en que el engranaje pasa por encima de un sensor durante un giro completo. Un engranaje giratorio de este tipo puede ser, por ejemplo, una turbina o compresor.
Estos sistemas de medición, sin embargo, presentan desafíos especiales cuando se utilizan en aplicaciones que implican alta fiabilidad. Por ejemplo, el ruido transitorio, si no se rechaza correctamente, puede causar errores de medición. Tal ruido transitorio puede introducir en el sistema de medición, por ejemplo, señales de baja amplitud y entrada lenta o; transitorios de compatibilidad electromagnética (EMC) ; o insertos calientes modulares o sustracciones de repuestos. Del mismo modo, las sobrecargas de energía, si no se abordan adecuadamente, pueden causar que el sistema de medición falle. Además, cualquier fallo en el sensor (por ejemplo, en relación con un sensor roto o cable roto en el sensor) se debe detectar rápidamente para que puedan realizarse las reparaciones y asegurarse el correcto desempeño del sistema de medición.
Por lo tanto, existe la necesidad de un sistema tolerante a fallos y procedimiento para determinar con precisión una velocidad de revolución de un engranaje giratorio.
El documento de patente alemana DE 3925889 describe un sistema para el cálculo de la velocidad de rueda de un vehículo de motor mediante el uso de un rotor dentado.
Sumario de la invención Un aparato para determinar una velocidad de revolución de un engranaje de acuerdo con la reivindicación 1 y un procedimiento correspondiente de acuerdo con la reivindicación 2
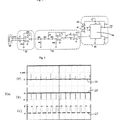
Breve descripción de los dibujos La Figura 1 muestra un diagrama de bloques del sistema de un sistema de medición, de acuerdo con una realización de la invención. La Figura 2 muestra un engranaje y una porción del sistema de medición que se muestra en la Figura 1. La Figura 3 muestra un ejemplo de una señal producida por el sensor en base al engranaje que se muestra en la Figura 2. La Figura 4 muestra un diagrama de bloques del sistema del módulo de impulsos de entrada que se muestra en las Figuras 1 y 2. La Figura 5 muestra un diagrama de bloques del sistema de la red de filtro de la pata de impulsos de entrada que se muestra en la Figura 4. La Figura 6 muestra un diagrama de bloques del sistema de la red del comparador de la pata de impulsos de entrada que se muestra en la Figura 4. La Figura 7 muestra un diagrama de bloques del sistema de un ASIC de impulsos de entrada, de acuerdo con una realización de la invención. La Figura 8 muestra un diagrama de flujo del funcionamiento de un motor de captura de un detector de flancos, de acuerdo con una realización de la invención. La Figura 9 muestra un ejemplo de una señal de datos de entrada y una señal de datos filtrada en base a un filtro de estabilización adaptivo, de acuerdo con una realización de la invención. La Figura 10 muestra un diagrama de flujo del funcionamiento de los procesadores principales, de acuerdo con una realización de la invención.
Descripción detallada Un sistema de medición comprende un detector de flancos, una memoria y un motor de impulsos de entrada. El detector de flancos recibe una señal de entrada que tiene impulsos correspondientes a los dientes de un engranaje giratorio que se miden. El detector de flancos recibe también una contraseñal. El detector de flancos detecta las transiciones de flancos de la señal de entrada y envía un conjunto de valores de tiempo en base a la señal de entrada y a la contraseñal. Cada valor de tiempo del conjunto de valores de tiempo está asociado únicamente con la transición de flanco detectada de la señal de entrada. La memoria recibe desde el detector de flancos el conjunto de valores de tiempo, y almacena el conjunto de valores de tiempo. El motor de impulsos de entrada calcula un conjunto de demoras de impulso a impulso en base al conjunto de valores de tiempo almacenados en la memoria. Un conjunto de procesadores principales puede calcular las revoluciones por minuto (RPM) del engranaje medido en base a las demoras de impulso a impulso.
En una realización, el sistema de medición es un sistema redundante triple que tiene tres canales de entrada independientes dentro del módulo de impulsos de entrada, estando cada uno asociado únicamente con uno de los tres procesadores principales. Los tres canales de entrada pueden funcionar en paralelo y aislados unos de otros.
Por lo tanto, si se produce un fallo de hardware en un canal, los otros canales pueden anularlo. Además, el módulo de fallos se puede retirar y reemplazar fácilmente sin interrumpir el funcionamiento de los módulos restantes. Los tres procesadores principales pueden utilizar una votación de dos de tres para proporcionar operaciones de proceso ininterrumpido y sin errores de alta integridad sin un solo punto de fallo.
La Figura 1 muestra un diagrama de bloques del sistema de un sistema de medición, de acuerdo con una realización de la invención. Como se muestra en la Figura 1, el sistema 100 de medición incluye un sensor 110, una placa 120 de base, un módulo 130 de impulsos de entrada, bus 140 de entrada/salida (E/S) triplicado, los procesadores 150, 160 y 170 principales y el dispositivo 180 de entrada del módulo. El módulo 130 de impulsos de entrada incluye un conjunto de patas 132 de impulsos de entrada y un conjunto de controladores 135 de E/S. Cada controlador 135 de E/S incluye un circuito 137 integrado de aplicación específica de impulsos de entrada (ASIC) y un transceptor 138 de bus aislado. El sensor 110 se acopla a la placa 120 de base, que se acopla al módulo 130 de impulsos de entrada. El módulo 130 de impulsos de entrada se acopla al bus 140 de E/S triplicado, que se acopla a los procesadores 150, 160 y 170 principales.
El sensor 110 mide el giro de un engranaje giratorio dispuesto de forma adyacente. El sensor 110 puede ser, por ejemplo, un sensor magnético pasivo o un sensor de velocidad activo. Un sensor magnético pasivo puede tener, por ejemplo, un imán permanente envuelto con una bobina de alambre. Cualquier cambio en la inductancia a la entrada del sensor produce un cambio en el flujo y da como resultado una tensión de salida. La salida de un sensor de tipo magnético de este tipo es proporcional a la velocidad de y la proximidad a los dientes del engranaje giratorio. Un sensor de velocidad activo puede tener, por ejemplo, una fuente de energía y sensores de efecto Hall, y emitir una señal conectada a tierra. Un sensor de velocidad activo de este tipo puede incluir una fuente de alimentación, por ejemplo, una fuente de alimentación de 5V, 12V o 24V, etc. adecuada para el sensor de velocidad activo particular. Aunque no se describe explícitamente en la presente memoria, en una realización, el sistema de medición se puede configurar para controlar el funcionamiento de la fuente de alimentación.
La placa 120 de base proporciona las conexiones de campo de potencia y de E/S para el sensor 110, y conecta el sensor 110 al módulo 130 de impulsos de entrada. La placa 120 de base puede tener una red de cabezales, puentes y resistencias para que cualquiera de los diversos tipos de sensores se puedan acoplar a la placa 120 de base y operable con el módulo 130 de impulsos de entrada.
El módulo 130 de impulsos de entrada recibe una señal desde el sensor 110 a través de la placa 120 de base. La señal recibida indica las transiciones de tensión procedentes del sensor 110 y corresponde a los dientes del engranaje que giran en la proximidad del sensor 110. Cada transición de entrada se muestrea y se mide el tiempo para un número optimizado de impulsos engranaje de entrada. Los valores de tiempo resultantes se utilizan para generar demoras de impulso a impulso, que se proporcionan en los procesadores 150, 160 y 170 principales a través del bus 140 de E/S triplicado.
Más específicamente, el módulo 130 de impulsos de entrada incluye un conjunto de canales de entrada independientes, cada uno de los que incluye su propia pata 132 de impulsos de entrada y controlador 135 de E/S. Por ejemplo, el módulo 130 de impulsos de entrada puede incluir tres canales A, B y C de entrada independientes. Cada uno de estos tres canales A, B y C de entrada independientes pueden incluir su propia pata 132 de impulsos de entrada, también denominada en el presente documento como patas A,... [Seguir leyendo]
Reivindicaciones:
1. Aparato para determinar una velocidad de revolución para un engranaje, que comprende:
un detector (710) de flancos, configurado el detector (710) de flancos para recibir una señal de entrada procedente de un sensor (110) y una contraseñal, la señal de entrada correspondiente a una señal asociada con un engranaje (10) giratorio que tiene una pluralidad de dientes del engranaje, cada diente del engranaje de la pluralidad de dientes del engranaje correspondiente a una transición de flanco de la señal de entrada, el detector de flancos configurado además para enviar una pluralidad de valores de tiempo en base a la señal de entrada y la contraseñal, estando cada valor de tiempo de la pluralidad de valores de tiempo asociado únicamente con una transición de flanco detectada a partir de la señal de entrada; una memoria (720) acoplada al detector de flancos, configurada la memoria para recibir desde el detector de flancos la pluralidad de valores de tiempo, estando la memoria configurada para almacenar la pluralidad de valores de tiempo; un motor (730) de impulsos de entrada acoplado a la memoria (720) , configurado el motor (730) de impulsos de entrada para calcular una pluralidad de demoras de impulso a impulso en base a la pluralidad de valores de tiempo almacenados en la memoria (720) , y un procesador (150, 160, 170) principal configurado para determinar la velocidad de revolución para el engranaje mediante el cálculo de una tasa de impulsos en base a las demoras de impulso a impulso.
caracterizado por un módulo (130) de impulsos de entrada que comprende el detector (710) de flancos, la memoria (720) y el motor (730) de impulsos de entrada, y un dispositivo (180) de entrada acoplado al módulo (130) de impulsos de entrada, configurado el dispositivo (180) de entrada para proporcionar la información del sensor recibida desde un usuario al módulo (130) de impulsos de entrada, comprendiendo la información del sensor uno o más de un indicador del tipo de sensor, un indicador de del número de dientes del engranaje, un indicador del tipo de flanco y un indicador del campo de tensión de sensor activo.
2. Aparato de acuerdo con la reivindicación 1, que comprende además un conjunto de procesadores (150, 160, 170) principales que está configurado para determinar la velocidad de revolución del engranaje mediante el cálculo de una tasa de impulsos en base a las demoras de impulso a impulso.
3. Aparato de acuerdo con la reivindicación 2, incluyendo el módulo (130) de impulsos de entrada un conjunto de patas (132) de impulsos de entrada.
4. Aparato de acuerdo con la reivindicación 3, en el que cada pata (132) impulsos de entrada incluye una red (133) de filtro y una red (134) del comparador.
5. Aparato de acuerdo con cualquiera de las reivindicaciones anteriores, en el que:
el detector de flancos incluye además un filtro de entrada, el filtro de entrada incluye un contador de datos válido y un selector de umbral, el filtro de entrada está configurado para proporcionar una indicación válida cuando el contador de datos válido supera un umbral predeterminado, el selector de umbral del filtro de entrada está configurado para seleccionar el umbral predeterminado en base a una frecuencia de entrada asociada con la señal de entrada.
6. Aparato de acuerdo con cualquiera de las reivindicaciones anteriores, que comprende además:
un probador (740) de velocidad cero acoplado al detector de flancos y al motor (730) de impulsos de entrada, estando el comprobador (740) de velocidad cero configurado para recibir una señal de prueba desde el detector de flancos y para enviar una señal de prueba de impulsos a un comparador acoplado al detector de flancos, el detector de flancos configurado para enviar la señal de prueba al probador de velocidad cero cuando el detector de flancos mide una frecuencia de la señal de entrada por debajo de un umbral predeterminado.
7. Aparato de acuerdo con cualquiera de las reivindicaciones anteriores, en el que el módulo (130) de impulsos de entrada está configurado para comprobar para un intervalo de tiempo entre los impulsos de la señal de entrada en una base por impulsos, el módulo (130) de impulsos de entrada está configurado para enviar una indicación de ausencia de impulsos si el intervalo de tiempo excede de un umbral predeterminado, estando el umbral predeterminado en base a una frecuencia de la señal de entrada.
8. Aparato de acuerdo con cualquiera de las reivindicaciones anteriores, en el que el detector (710) de flancos incluye además:
un filtro anti-rebote adaptivo que tiene una longitud de filtro anti-rebote asociada mayor que una longitud de una transición de flanco espuria, el filtro anti-rebote adaptativo configurado para ajustar la longitud del filtro anti-rebote asociado en base a una frecuencia de la señal de entrada.
9. Aparato de acuerdo con cualquiera de las reivindicaciones anteriores, en el que:
la memoria (720) incluye un puerto de entrada y un puerto de salida, estando el puerto de entrada de la memoria acoplado al detector de flancos, estando el puerto de salida de la memoria acoplado al motor (730) de impulsos de entrada, la memoria (720) configurada para almacenar el valor de tiempo para cada transición de flanco detectada de manera circular.
10. Aparato de acuerdo con cualquiera de las reivindicaciones anteriores, en el que la señal de entrada tiene una pluralidad de impulsos que tienen una frecuencia entre sustancialmente 0, 5 Hz y 32.000 Hz.
11. Aparato de acuerdo con cualquiera de las reivindicaciones 2 a 10, que comprende además:
un segundo detector de flancos, configurado el segundo detector de flancos para recibir la señal y la señal del temporizador sincronizado, configurado además el segundo detector de flancos para enviar su propio valor de tiempo para cada transición de flanco detectada a partir de la señal de entrada; una segunda memoria acoplada al segundo detector de flancos, configurada la segunda memoria para recibir desde el segundo detector de flancos su propio valor de tiempo para cada transición de flanco detectada de la señal de entrada, estando la segunda memoria configurada para almacenar el valor de tiempo para cada transición de flanco detectada para el segundo detector de flancos; un segundo motor de impulsos de entrada acoplado a la segunda memoria, el segundo motor de impulsos de entrada configurado para calcular un demora de impulso a impulso en base al valor de tiempo para cada transición de flanco detectada almacenada en la segunda memoria; un tercer detector de flancos, configurado el tercer detector de flancos para recibir la señal y la señal del temporizador sincronizado, el tercer detector de flancos configurado además para enviar su propio valor de tiempo para cada transición de flanco detectada a partir de la señal de entrada; una tercera memoria acoplada al tercer detector de flancos, configurada la tercera memoria para recibir desde el tercer detector de flancos su propio valor de tiempo para cada transición de flanco detectada a partir de la señal de entrada, estando la tercera memoria configurada para almacenar el valor de tiempo para cada transición de flanco detectada para el tercer detector de flancos; y un tercer motor de impulsos de entrada acoplado a la tercera memoria, configurado el tercer motor de impulsos de entrada para calcular un demora de impulso a impulso en base al valor de tiempo para cada transición de flanco detectada almacenada en la tercera memoria.
12. Aparato de acuerdo con la reivindicación 11, que comprende:
al menos tres motores de impulsos de entrada, un primer procesador (150) acoplado al primer motor de impulsos de entrada, calculando el primer procesador (150) una tasa de impulsos en base al demora de impulso a impulso desde el primer motor de impulsos de entrada; un segundo procesador (160) acoplado al segundo motor de impulsos de entrada y al primer procesador (150) , calculando el segundo procesador (160) una tasa de impulsos en base a la demora de impulso a impulso desde el segundo motor de impulsos de entrada; y un tercer procesador (170) acoplado al tercer motor de impulsos de entrada, al primer procesador (150) y al segundo procesador (160) , calculando el tercer procesador (170) una tasa de impulsos en base a la demora de impulso a impulso desde el tercer motor de impulsos de entrada, el primer procesador (150) , el segundo procesador (160) y el tercer procesador (170) calculando una tasa de impulsos votada en base a la frecuencia del impulso calculada por el primer procesador (150) , la frecuencia del impulso calculada por el segundo procesador (160) , y la frecuencia del impulso calculada por el tercer procesador (170) .
13. Procedimiento para determinar una velocidad de revolución para un engranaje que tiene una pluralidad de dientes de engranaje que incluye un primer diente del engranaje y un segundo diente del engranaje que es diferente del primer diente del engranaje, que comprende:
detectar una pluralidad de transiciones de flancos dentro de una señal de entrada, incluyendo la pluralidad de transiciones de flancos una primera transición de flanco y una segunda transición de flanco, estando la primera transición de flanco asociada con el primer diente del engranaje, estando la segunda transición de flanco asociada al segundo diente del engranaje; almacenar un valor de tiempo para cada transición de flanco de la pluralidad de transiciones de flancos; recibir información del sensor que comprende uno o más de un indicador del tipo de sensor, un indicador del número de dientes del engranaje, un indicador del tipo de flanco y un indicador del campo de tensión de sensor activo de un usuario que utiliza un dispositivo (180) de entrada; calcular una pluralidad de demoras de impulso a impulso en función del valor de tiempo para cada transición de flanco de la pluralidad de transiciones de flancos, estando el cálculo de la pluralidad de las demoras de impulso a impulso en base a la información recibida del sensor; y determinar la velocidad de revolución para el engranaje mediante el cálculo de una tasa de impulsos en base a las demoras de impulso a impulso.
14. Procedimiento de acuerdo con la reivindicación 13, en el que la etapa de detección, la etapa de almacenamiento y la etapa de cálculo se realizan por separado para cada uno de al menos tres subsistemas que funcionan en paralelo.
15. Procedimiento de acuerdo con la reivindicación 14, en el que cada subsistema realiza además:
la medición de un intervalo de tiempo entre una primera transición de flanco y una segunda transición de flanco a partir de la pluralidad de transiciones de flancos; y el envío de una indicación de ausencia de impulsos si el intervalo de tiempo excede de un umbral predeterminado.
16. Procedimiento de acuerdo con la reivindicación 14 o 15, en el que cada subsistema realiza además:
la detección de una señal de prueba que tiene una frecuencia por debajo de una frecuencia predeterminada; el envío de un impulso de prueba de velocidad cero a un comparador antero-posterior cuando se detecta la señal de prueba; y la suspensión de la etapa de almacenamiento para el impulso de prueba de velocidad cero cuando se detecta la señal de prueba.
17. Procedimiento de acuerdo con cualquiera de las reivindicaciones 14 a 16, en el que cada subsistema realiza además:
la medición de un intervalo de tiempo entre una primera transición de flanco y una segunda transición de flanco a partir de la pluralidad de transiciones de flancos; y el filtrado de la primera transición del flanco cuando el intervalo de tiempo está por debajo de un umbral predeterminado, estando el umbral predeterminado en base a una frecuencia de la señal de entrada.
18. Procedimiento de acuerdo con cualquiera de las reivindicaciones 14 a 17, que comprende además:
recibir un indicador de campo de tensión cuando el indicador del tipo de sensor indica un sensor activo.
Patentes similares o relacionadas:
 Sensor de velocidad, del 13 de Enero de 2016, de Lesikar, A.S: Un sensor de velocidad para medir la velocidad de una rueda dentada o una rueda provista de marcas ferromagnéticas, montada en el interior de una caja de cambios , […]
Sensor de velocidad, del 13 de Enero de 2016, de Lesikar, A.S: Un sensor de velocidad para medir la velocidad de una rueda dentada o una rueda provista de marcas ferromagnéticas, montada en el interior de una caja de cambios , […]
SENSOR DE VELOCIDAD ANGULAR., del 16 de Marzo de 2007, de LUCAS INDUSTRIES LIMITED: Un sensor de velocidad angular para detectar la velocidad angular de un rotor , comprendiendo el sensor: al menos dos medios de generación […]
METODO Y SISTEMA PARA PRUEBAS DE RENDIMIENTO DE MAQUINAS ROTATIVAS., del 16 de Noviembre de 2005, de M.E.A. MOTOR INSPECTION LTD.: Método para realizar pruebas en un motor eléctrico o en un componente del mismo, caracterizado dicho método por las siguientes etapas: (a) se mide una […]
PROCEDIMIENTO PARA CALIBRAR UN DISPOSITIVO DE MEDIDA DE LA VELOCIDAD O DISTANCIA., del 1 de Julio de 2003, de TVI EUROPE LIMITED: Un procedimiento para calibrar un dispositivo de medida de velocidad o distancia para un vehículo que está provisto de un generador de impulsos de emisor para generar […]
DISPOSITIVO SENSOR., del 16 de Febrero de 2003, de VOLKSWAGEN AKTIENGESELLSCHAFT: LA INVENCION SE REFIERE A UN SISTEMA SENSOR PARA LA DETERMINACION CUANTITATIVA DE UNA MAGNITUD DE MEDIDA Y POR LO MENOS UN VALOR UMBRAL DE LA MAGNITUD DE MEDIDA, COMPRENDIENDO […]
DISPOSITIVO DE MEDICION DE LA VELOCIDAD DE ROTACION DE UN MOTOR TERMICO, PARTICULARMENTE PARA VEHICULO AUTOMOVIL, del 1 de Junio de 1998, de VALEO EQUIPEMENTS ELECTRIQUES MOTEUR: LA INVENCION SE REFIERE A UN DISPOSITIVO DE MEDICION DE LA VELOCIDAD DE ROTACION DE UN MOTOR TERMICO, PARTICULARMENTE PARA VEHICULOS AUTOMOVILES, […]
DISPOSITIVO PARA LA MEDIDA ELECTRONICA DE LA VERACIDAD DE MAQUINAS MOTRICES DE COMBUSTION Y PROCEDIMIENTO PARA LA SUPERVISION DEL MOTOR CON ESTE DISPOSITIVO., del 1 de Julio de 1994, de SCHOEGGL, PETER: EL DISPOSITIVO POSEE UN CALCULADOR PARA EL CALCULO DE LA VELOCIDAD QUE ESTA CONECTADO CON LOS RECEPTORES PARA EL REGISTRO DE LOS CICLOS O PASADAS CON REFERENCIA […]
 METODO PARA MEDIR LA VELOCIDAD DE UN MOTOR, del 16 de Abril de 2009, de JOHNSON ELECTRIC S.A.: Un método para producir una señal indicativa de la velocidad rotacional de un motor PMDC que tiene un rotor bobinado, que comprende las etapas […]
METODO PARA MEDIR LA VELOCIDAD DE UN MOTOR, del 16 de Abril de 2009, de JOHNSON ELECTRIC S.A.: Un método para producir una señal indicativa de la velocidad rotacional de un motor PMDC que tiene un rotor bobinado, que comprende las etapas […]