Aparato y procedimiento para derivar una información direccional y sistemas.
Un aparato (100) para derivar información direccional (101, d(k,
n)) a partir de una pluralidad de señales de micrófono (1031 a 103N, P1a PN) o a partir de una pluralidad de componentes (Pi(k, n)) de una señal de micrófono (103i, Pi), en donde se asocian diferentes direcciones de orientación efectiva de micrófono con señales de micrófono (1031 a 103N, P1 a PN) o componentes (Pi(k, n)), el aparato (100) que comprende:
un medio de combinación (105) configurado para obtener un valor de magnitud a partir de una señal de micrófono (Pi) o un componente (Pi(k, n)) de la señal de micrófono (Pi), y para combinar elementos de información de dirección (b1 a bN) que describen las direcciones de orientación efectiva de micrófono, tal que un elemento de información de dirección (bi) que describe una dada dirección de orientación efectiva de micrófono en ponderado en dependencia del valor de magnitud de la señal de micrófono (Pi), o del componente (Pi(k, n)) de la señal de micrófono (Pi), asociada con la dirección de orientación efectiva de micrófono dada, para derivar la información direccional (101, d(k, n)).
en donde el elemento de información de dirección (bi) que describe la dirección de orientación efectiva de micrófono dada es un vector que apunta a la dirección de orientación efectiva de micrófono dada.
en el que el combinador está configurado para derivar la información direccional d(k, n) para una región de tiempo y frecuencia (k, n) correspondiente a una combinación lineal de los elementos de información de dirección (b1 a bN) ponderados en función de valores de magnitud asociados a la región de tiempo y frecuencia (k, n) dada, y en el que los elementos de información de dirección (b1 a bN) son independientes de las regiones de tiempo y frecuencia (k, n).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2011/068805.
Solicitante: FRAUNHOFER-GESELLSCHAFT ZUR FORDERUNG DER ANGEWANDTEN FORSCHUNG E.V..
Nacionalidad solicitante: Alemania.
Dirección: HANSASTRASSE 27C 80686 MUNCHEN ALEMANIA.
Inventor/es: AHONEN, JUKKA, DEL GALDO,Giovanni, PULKKI,Ville, THIERGART,OLIVER, KÜCH,FABIAN.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- H04R3/00 ELECTRICIDAD. › H04 TECNICA DE LAS COMUNICACIONES ELECTRICAS. › H04R ALTAVOCES, MICROFONOS, CABEZAS DE LECTURA PARA GRAMOFONOS O TRANSDUCTORES ACUSTICOS ELECTROMECANICOS ANALOGOS; APARATOS PARA SORDOS; SISTEMAS PARA ANUNCIOS EN PUBLICO (producción de sonidos cuya frecuencia no está determinada por la frecuencia de alimentación G10K). › Circuitos para transductores (disposiciones para producir una reverberación sonora o un eco G10K 15/08; amplificadores H03F).
PDF original: ES-2526785_T3.pdf
Fragmento de la descripción:
Aparato y procedimiento para derivar una información direccional y sistemas
1. Campo técnico
[1] Las realizaciones del presente invento se refieren a un aparato para derivar una información direccional desde una pluralidad de señales de micrófono o desde una pluralidad de componentes de una señal de micrófono. Otras realizaciones se refieren a sistemas que comprenden tal aparato. Otras realizaciones se refieren a un procedimiento para derivar una información direccional desde una pluralidad de señales de micrófono.
2. Antecedentes del Invento
[2] La grabación de sonido espacial apunta a captar un campo de sonido con una pluralidad de micrófonos de modo que en el lado de reproducción un oyente percibe la imagen de sonido tal como se presentó en el lugar de grabación. Los enfoques estándar para la grabación de sonido espacial usan micrófonos de estéreo convencionales o combinaciones más sofisticadas de micrófonos direccionales, por ejemplo, tales como micrófonos de formato B usados en Ambisonics (M.A. Gerzon. Periphony, Reproducción de sonido de ancho y altura {Widthheight sound reproduction), J. Audio Eng. Soc., 21(1 ):21, 1973). En general, se refiere a la mayoría de estos procedimientos como técnicas de micrófono coincidente.
[3] De manera alternativa, se pueden aplicar unos procedimientos, que se basan sobre la representación de campos de sonido, a los cuales se refiere como codificadores de audio paramétricos espaciales. Estos procedimientos determinan una o más señales de audio mezcladas en forma descendente junto con la información lateral espacial correspondiente que es importante para la percepción del sonido espacial. Ejemplos son la Codificación de Audio Direccional (DirAC (Directional Audio Coding)), como se discute en V. Pulkki, Reproducción de sonido espacial con codificación de audio direccional (Spatial sound reproduction with directional audio coding), J. Audio Eng. Soc., 55(6):53516, June 27, o el tal denominado enfoque de micrófonos de audio espaciales (SAM) propuesto en C. Faller, Micrófonos como dispositivo frontales para codificadores de audio espacial (Microphone frontends for spatial audio coders). En 125a Convención de AES (125th AES Convention), Publicación 758, San Francisco, Oct. 28. La información de referencia espacial es determinada en subbandas de frecuencia y consiste básicamente en la dirección de llegada (DOA) del sonido y, de vez en cuando, del grado de difusión del campo de sonido u otras medidas estadísticas. En un estado de síntesis, se determinan las señales de altoparlante deseadas sobre la base de las señales mezcladas en forma descendente y la información lateral paramétrica.
[4] Además de la grabación de audio espacial, se han usado los enfoques paramétricos a representaciones de campos de sonido en aplicaciones tales como el filtrado direccional (M. Kallinger, H. Ochsenfeld, G. Del Galdo, F. Kuech, D. Mahne, R. SchultzAmling y O. Thiergart, Un enfoque de filtrado espacial para la codificación de audio espacial (A spatial filtering approach for directional audio coding), en 126a Convención de AES (126th AES Convention), Publicación 7653, Munich, Germany, Mayo 29) o localización de fuentzes (O. Thiergart, R. Schultz Amling, G. Del Galdo, D. Mahne y F. Kuech, Localización de fuentes de sonido en entornos reverberantes sobre la base de parámetros de codificación de audio direccional (Localization of sound sources in reverberant environments based on directional audio coding parameters), en 128a Convención de AES (128th AES Convention), Publicación 7853, Ciudad de Nueva York, NY, USA, Oct. 29). Estas técnicas se basan también en parámetros tales como la DOA de sonido o el grado de difusión del campo de sonido.
[5] Una forma para estimar la información del campo de sonido, a saber, la dirección de llegada del sonido, es medir el campo en diferentes puntos con un arreglo de micrófonos. En la literatura se propusieron varios enfoques que usan estimaciones de retardo de tiempo relativo entre las señales de micrófonos: J. Chen, J. Benesty e Y. Huang, Estimación de retardo de tiempo en entornos de acústica de salas: Una reseña general (Time delay estimation in room acoustic environments: An OverView), en EURASIP Journal on Applied Signal Processing, Artículo ID 2653, 26. Sin embargo, estos enfoques hacen uso de la información de fase de las señales de micrófono que inevitablemente conducen a un efecto de aliasing espacial. De hecho, cuando se analizan frecuencias más altas, las longitudes de onda son más cortas. Al llegar a una cierta frecuencia, con el nombre frecuencia de aliasing, la longitud de onda es tal que las lecturas de fases idénticas corresponden a dos o más direcciones de modo que no sea posible una estimación no ambigua (por lo menos no sin una información adicional a priori).
[6] Existe una gran variedad de procedimientos para estimar la DOA de sonido usando un arreglo de micrófonos. Un resumen de los enfoques comunes se encuentra en J. Chen, J. Benesty e Y. Huang, Estimación de retardo de tiempo en entornos de acústica de salas: Una reseña general (Time delay estimation in room acoustic environments: An OverView), en EURASIP Journal on Applied Signal Processing, Artículo ID 2653, 26. Estos enfoques tienen en común que explotan la relación de fase de las señales de micrófono para estimar la DOA de sonido. Frecuentemente, se determina primero la diferencia de tiempo entro los diferentes sensores y luego se explota el conocimiento de la geometría del arreglo para calcular la correspondiente DOA. Otros enfoques evalúan la
correlación entre las diferentes señales de micrófono en las subbandas para estimar la DOA de sonido (C. Faller, Micrófonos como dispositivo frontales para codificadores de audio espacial (Microphone frontends for spatial audio coders), en 125a Convención de AES (125th AES Convention), Publicación 758, San Francisco, Oct. 28 y J. Chen, J. Benesty e Y. Fluang, Estimación de retardo de tiempo en entornos de acústica de salas: Una reseña general (Time delay estimation in room acoustic environments: An OverView), en EURASIP Journal on Applied Signal Processing, Artículo ID 2653, 26).
[7] En la DirAC se determina la DOA para cada banda de frecuencia sobre la base del vector de intensidad de sonido activo medido en el campo de sonido observado. En lo sigue se sintetizará brevemente los parámetros direccionales en la DirAC. Si P(k, n) denota la presión de sonido y U(k, n) el vector de velocidad de partícula vector con el índice de frecuencia k y el índice de tiempo n, entonces el vector de intensidad de soinido activo se obtienen como
Ia(k,n) = -^R t{P(k,n)U*(k,ri)} (D
2p<>
[8] El superíndice * denota el complejo conjugada y Re{} es la parte real de un número complejo, po representa la densidad promedia de aire. Finalmente, la dirección opuesta de la(k, n) apunta a la DOA del sonido:
eDOA (fc,n)
Iz(k,n)
Ia{k,n)
(2)
[9] Además se puede determinar el grado de difusión del campo de sonido, por ejemplo, de acuerdo con
$(k,n)
||E{ia(fc,n)}||
E{||Ia(*,n)ll}
(3)
[1] En la práctica, se calcula el vector de velocidad de partícula a partir del gradiente de presión de cápsulas de micrófonos omnidireccionales con poca separación entre sí a lo cual se refiere frecuentemente como un arreglo de micrófonos. Considerando la Figura 2, el componente x del vector de velocidad de partícula puede ser calculado, p. ej,., usando un par de micrófonos de acuerdo con
Ux{k,n) = K(k) [Pi(k,n) - P2(&,n)], (4)
donde k(k) representa un factor de normalización que depende de la frecuencia. Su valor depende en la configuración de micrófonos, por ejemplo, de la distancia entre los micrófonos y/o sus patrones de directividad. Los componentes restantes Uy(k, n) (y Uz(k, n)) de U(kn) pueden ser determinados análogamente combinando pares adecuados de micrófonos.
[11] Como se muestra en M. Kalllnger, F. Kuech, R. SchultzAmling, G. Del Galdo, J. Añonen y V. Pulkki, Análisis y ajuste de arreglos planos de micrófonos para la aplicación en la codificación de audio direccional (Analysis and Adjustment of Planar Microphone Arrays for Application ¡n Dlrectlonal Audio Codlng), en 124a Convención de AES (124th AES Convention), Publicación 7374, Amsterdam, los Países Bajos, Mayo 28, el allaslng espacial afecta la información de fase del vector de velocidad de partícula, lo cual Impide el uso de los gradientes de presión para la estimación activa de intensidad de sonido de las frecuencias altas. El allaslng espacial produce ambigüedades en las estimaciones de DOA. Como se puede mostrar, se determina la frecuencia máxima fmax, donde se pueden obtener las estimaciones... [Seguir leyendo]
Reivindicaciones:
1. Un aparato (100) para derivar información direccional (101, d (k, n) ) a partir de una pluralidad de señales de micrófono (1031 a 103N, P1a PN) o a partir de una pluralidad de componentes (Pi (k, n) ) de una señal de micrófono (103i, Pi) , en donde se asocian diferentes direcciones de orientación efectiva de micrófono con señales de micrófono 5 (1031 a 103N, P1 a PN) o componentes (Pi (k, n) ) , el aparato (100) que comprende:
un medio de combinación (105) configurado para obtener un valor de magnitud a partir de una señal de micrófono (Pi) o un componente (Pi (k, n) ) de la señal de micrófono (Pi) , y para combinar elementos de información de dirección (b1 a bN) que describen las direcciones de orientación efectiva de micrófono, tal que un elemento de información de 10 dirección (bi) que describe una dada dirección de orientación efectiva de micrófono en ponderado en dependencia del valor de magnitud de la señal de micrófono (Pi) , o del componente (Pi (k, n) ) de la señal de micrófono (Pi) , asociada con la dirección de orientación efectiva de micrófono dada, para derivar la información direccional (101, d (k, n) ) .
en donde el elemento de información de dirección (bi) que describe la dirección de orientación efectiva de micrófono 15 dada es un vector que apunta a la dirección de orientación efectiva de micrófono dada.
en el que el combinador está configurado para derivar la información direccional d (k, n) para una región de tiempo y frecuencia (k, n) correspondiente a una combinación lineal de los elementos de información de dirección (b1 a bN) ponderados en función de valores de magnitud asociados a la región de tiempo y frecuencia (k, n) dada, y en el que los elementos de información de dirección (b1 a bN) son independientes de las regiones de tiempo y frecuencia (k, 20 n) .
2. Un aparato (100) de acuerdo con la reivindicación 1, en el que la información de dirección para la región de tiempo y frecuencia dada es una estimación de un vector dt (k, n) que apunta hacia la dirección desde la que un sonido se propaga a la frecuencia y los índices de tiempo de la 25 región de tiempo y frecuencia dada.
3. Un aparato (100) de acuerdo con una cualquiera de las reivindicaciones precedentes, en donde una dirección de orientación efectiva de micrófono asociada a una señal de micrófono (Pi) describe la dirección donde tiene su máxima respuesta a micrófono del cual se deriva la señal de micrófono (Pi) . 30
4. Un aparato (100) de acuerdo con una cualquiera de las reivindicaciones precedentes,
en donde el medio de combinación (105) está configurado para obtener el valor de magnitud tal que el valor de magnitud describe una magnitud de un coeficiente espectral (Pi (k, n) ) que representa una subâ?"región espectral (k) de la señal de micrófono (Pi) . 35
5. Un aparato (100) de acuerdo con una cualquiera de las reivindicaciones precedentes,
en donde el medio de combinación (105) está configurado para derivar la información direccional (101, d (k, n) ) sobre la base de una representación de tiempoâ?"frecuencia de las señales de micrófono (P1 a PN) o de los componentes.
6. Un aparato (100) de acuerdo con una cualquiera de las reivindicaciones precedentes,
en donde el medio de combinación (105) es configurado para combinar los elementos de información de dirección (b1 a bN) ponderados en dependencia de valores de magnitud que están asociados a una pequeña región dada de tiempo y frecuencia (k, n) a fin de derivar la información direccional d (k, n) para la pequeña región dada de tiempo y frecuencia (k, n) . 45
7. Un aparato (100) de acuerdo con una cualquiera de las reivindicaciones precedentes,
en donde el medio de combinación (105) está configurado para combinar para una pluralidad de diferentes pequeñas regiones de tiempoâ?"frecuencia los mismos elementos de información de dirección (b1 a bN) , siendo ponderados de manera diferente dependiendo de valores de magnitud asociados a las diferentes pequeñas regiones 50 de tiempoâ?"frecuencia.
8. Un aparato de acuerdo con una cualquiera de las reivindicaciones precedentes,
en donde una primera dirección de orientación efectiva de micrófono está asociada con una primera señal de micrófono de la pluralidad de señales de micrófono; 55
en donde una segunda dirección de orientación efectiva de micrófono está asociada con una segunda señal de micrófono de una pluralidad de señales de micrófono;
en donde la primera dirección de orientación efectiva de micrófono es diferente de la segunda dirección de orientación efectiva de micrófono; y
en donde el medio de combinación está configurado para obtener un primer valor de magnitud a partir de la primera 60 señal de micrófono o un componente de la primera señal de micrófono, para obtener un segundo valor de magnitud a partir de la segunda señal de micrófono o un componente de la segunda señal de micrófono, y para combinar un primer elemento de información de dirección que describe la primera dirección de orientación efectiva de micrófono y un segundo elemento de información de dirección que describe la segunda dirección de orientación efectiva de micrófono, tal que el primer elemento de información de dirección es ponderado por el primer valor de magnitud y el segundo elemento de información de dirección es ponderado por el segundo valor de magnitud, para derivar la información direccional.
9. Un aparato de acuerdo con una cualquiera de las reivindicaciones precedentes, 5
en donde el medio de combinación está configurado para obtener el cuadrado de un valor de magnitud en base al valor de magnitud, el cuadrado del valor de magnitud que describe una potencia de la señal de micrófono (Pi) o del componente (Pi (k, n) ) de la señal de micrófono, y en donde el medio de combinación está configurado para combinar los elementos de información de dirección (b1 a bN) tal que un elemento de información de dirección (bi) es ponderado dependiendo del cuadrado del valor de magnitud de la señal de micrófono (Pi) o del componente (Pi (k, 10 n) ) de la señal de micrófono (Pi) asociada con la dirección de orientación efectiva de micrófono dada.
10. Un aparato (100) de acuerdo con una cualquiera de las reivindicaciones precedentes,
en donde el medio de combinación (105) está configurado para derivar la información direccional (d (k, n) ) de acuerdo con la siguiente ecuación: 15
(6)
en la cual d (k, n) denota la información direccional para una dada pequeña región de tiempoâ?"frecuencia (k, n) , Pi (k, n) denota un componente de la señal de micrófono (Pi) de un iâ?"ésimo micrófono para la pequeña región de tiempoâ?"frecuencia dada (k, n) , κ denota un valor de exponente y bi denota un elemento de información de dirección que describe la dirección de orientación efectiva de micrófono del iâ?"ésimo micrófono. 20
11. Un aparato de acuerdo con la reivindicación 10, en donde κ > 0.
12. Un aparato de acuerdo con una cualquiera de las reivindicaciones precedentes,
en donde el medio de combinación está configurado para derivar la información direccional (d (k, n) ) sobre la base de 25 los valores de magnitud e independiente de las fases de las señales de micrófono (P1 a PN) o de los componentes (Pi (k, n) ) de la señal de micrófono (Pi) en un primer rango de frecuencia; y
en donde el medio de combinación está configurado además para derivar la información direccional en dependencia de las fases de las señales de micrófono (P1 a PN) o de los componentes (Pi (k, n) ) de la señal de micrófono (Pi) en un segundo rango de frecuencia. 30
13. Un aparato de acuerdo con una cualquiera de las reivindicaciones precedentes, en donde el medio de combinación está configurado tal que el elemento de información de dirección (bi) es ponderado solamente en dependencia del valor de magnitud.
14. Un aparato (100) de acuerdo con una cualquiera de las reivindicaciones precedentes, en donde el medo de combinación (105) está configurado para combinar linealmente los elementos de información de dirección (b1 a bN) .
15. Un sistema (900) que comprende:
un aparato (100) de acuerdo con una cualquiera de las reivindicaciones precedentes,
un primer micrófono direccional (9011) que tiene una primera dirección de orientación efectiva de micrófono (9031) para derivar una primera señal de micrófono (1031) de la pluralidad de señales de micrófono, siendo asociada la primera señal de micrófono (1031) con una primera dirección de orientación efectiva de micrófono (9031) ; y
un segundo micrófono direccional (9012) que tiene una segunda dirección de orientación efectiva de micrófono 45 (9032) para derivar una segunda señal de micrófono (1032) de la pluralidad de señales de micrófono, siendo asociada la segunda señal de micrófono (1032) con la segunda dirección de orientación efectiva de micrófono (9032) ; y
en donde la primera dirección de orientación (9031) es diferente de la segunda dirección de orientación (9032) .
16. Un sistema (1000) que comprende:
un aparato de acuerdo con una cualquiera de las reivindicaciones 1 a 14,
un primer micrófono omnidireccional (10011) para derivar una primera señal de micrófono (1031, ) de la pluralidad de señales de micrófono; 55
un segundo micrófono omnidireccional (10012) para derivar una segunda señal de micrófono (1032) ; y
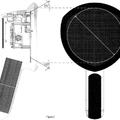
un objeto de apantallamiento (1005) ubicado entre el primer micrófono omnidireccional (10011) y el segundo micrófono omnidireccional (10012) para formar patrones de respuesta efectiva del primer micrófono omnidireccional (10011) y del segundo micrófono omnidireccional (10012) , tal que un patrón de respuesta efectiva formado del primer micrófono omnidireccional (10011) comprende una primera dirección de orientación efectiva de micrófono (10031) y 60 un patrón de respuesta efectiva formado del segundo micrófono omnidireccional (10012) comprende una segunda dirección de orientación efectiva de micrófono (10032) , que es diferente de la primera dirección de orientación efectiva de micrófono (10031) .
17. Un sistema de acuerdo con una cualquiera de las reivindicaciones 15 o 16, en donde los micrófonos direccionales (9011, 9012) o los micrófonos omnidireccionales (10011, 10012) están acomodados tal que una suma 5 de elementos de información de dirección que son vectores apuntando en las direcciones de orientación efectiva de micrófono (9031, 9032, 10031, 10032) es igual a cero dentro de un rango de tolerancia de ± 30 % de la normal de uno de los elementos de información de dirección.
18. Un procedimiento (800) para derivar una información direccional desde una pluralidad de señales de micrófono o 10 desde una pluralidad de componentes de una señal de micrófono, en el cual se asocian las diferentes direcciones efectivas de orientación de micrófonos con las señales de micrófono o con los componentes, el procedimiento que comprende:
obtener (801) un valor de magnitud a partir de la señal de micrófono o un componente de la señal de micrófono; y 15
combinar (803) elementos de información de dirección que describen direcciones efectivas de orientación de micrófono de modo que se pondere un elemento de informaciones de dirección que describe la dirección efectiva de orientación de micrófono en dependencia del valor de magnitud de la señal de micrófono o del componente de la señal de micrófono asociado con la dirección efectiva dada de orientación de micrófono para derivar la información direccional; 20
en donde el elemento de información de dirección que describe la dirección de orientación efectiva de micrófono dada es un vector que apunta a la dirección de orientación efectiva de micrófono dada.
En el que la información direccional para una región de tiempo y frecuencia se deriva correspondiente a una combinación lineal de los elementos de información de dirección ponderados en función de valores de magnitud asociados a la región de tiempo y frecuencia dada, y 25
en el que los elementos de información de dirección (b1 a bN) son independientes de las regiones de tiempo y frecuencia (k, n) .
19. Un programa de computadora que tiene un código de programa para ejecutar, cuando corre en una computadora, el procedimiento de la reivindicación 18. 30
Patentes similares o relacionadas:
 Una cámara acústica y un método para revelar emisiones acústicas de varios lugares y dispositivos, del 24 de Junio de 2020, de Noiseless Acoustics Oy: Una cámara acústica, que comprende:
- una carcasa ;
- un conjunto de micrófonos configurados para recopilar información de sonido acústico y para […]
Una cámara acústica y un método para revelar emisiones acústicas de varios lugares y dispositivos, del 24 de Junio de 2020, de Noiseless Acoustics Oy: Una cámara acústica, que comprende:
- una carcasa ;
- un conjunto de micrófonos configurados para recopilar información de sonido acústico y para […]
Procedimiento para eliminar el polvo en orificio de salida de sonido de altavoz, del 20 de Mayo de 2020, de Guangdong OPPO Mobile Telecommunications Corp., Ltd: Un procedimiento para eliminar el polvo en un orificio de salida de sonido de un altavoz , que comprende: leer un archivo de audio almacenado previamente […]
Renderización mejorada de contenido de audio inmersivo, del 13 de Mayo de 2020, de DOLBY INTERNATIONAL AB: Método de renderización de audio de entrada para su reproducción en un entorno de reproducción, en donde el audio de entrada incluye por lo menos un […]
Dispositivo para generar salida de audio, del 15 de Abril de 2020, de QUALCOMM INCORPORATED: Un dispositivo de auriculares que comprende: un primer auricular configurado para: recibir un sonido de referencia en un […]
Encadenamiento en forma de margarita de controladores de audio de torneo, del 29 de Enero de 2020, de Voyetra Turtle Beach, Inc: Un sistema para procesar señales de audio, comprendiendo el sistema: unos auriculares y un primer controlador de audio de torneo (TAC) , comprendiendo dicho TAC […]
Aparato y procedimiento para la adquisición espacialmente selectiva del sonido mediante triangulación acústica, del 8 de Enero de 2020, de FRAUNHOFER-GESELLSCHAFT ZUR FORDERUNG DER ANGEWANDTEN FORSCHUNG E.V.: Un aparato para capturar sonido desde una ubicación objetivo ubicada en un entorno de grabación, que comprende: un primer formador de haces que […]
Método y aparato para la mejora multisensorial del habla en un dispositivo móvil, del 13 de Noviembre de 2019, de Zhigu Holdings Limited: Un dispositivo móvil de mano, que comprende: un micrófono de conducción de aire que está configurado para convertir ondas acústicas en una señal […]
 Aparato, procedimiento o programa informático para generar una descripción de campo de sonido, del 28 de Agosto de 2019, de FRAUNHOFER-GESELLSCHAFT ZUR FORDERUNG DER ANGEWANDTEN FORSCHUNG E.V.: Aparato para generar una descripción de campo de sonido que tiene una representación de componentes de campo de sonido, que comprende:
un determinador de dirección […]
Aparato, procedimiento o programa informático para generar una descripción de campo de sonido, del 28 de Agosto de 2019, de FRAUNHOFER-GESELLSCHAFT ZUR FORDERUNG DER ANGEWANDTEN FORSCHUNG E.V.: Aparato para generar una descripción de campo de sonido que tiene una representación de componentes de campo de sonido, que comprende:
un determinador de dirección […]