APARATO PARA LA MEDICIÓN DE FUERZAS QUE SE PRODUCEN MEDIANTE UN DESEQUILIBRIO DE UN ELEMENTO ROTATIVO.
Aparato para medir fuerzas que se producen por un desequilibrio de un elemento rotativo,
que comprende - un árbol de medición (2) que está soportado en un soporte rotativo (26) de manera rotativa alrededor de su eje (23) y al que el elemento rotativo (1) está fijado para la operación de medición, y unos medios de soporte (3) que tienen sensores de medición de fuerza (4, 5) para soportar el árbol de medición (2) en un marco estacionario (6), en el que - los medios de soporte (3) tienen un marco intermedio (7) en el que se apoya el árbol de medición (2) en un plano de soporte que tiene un sensor de medición de fuerza (4), - el marco intermedio (7) se apoya en el marco estacionario (6) mediante una sensor de medición de fuerza adicional (5) y mediante de un primer par (11, 12) de palancas de soporte y pivotes (15 a 18), - el soporte rotativo (26) está conectado de manera fija a un dispositivo de sujeción rígido (29) en una separación axial respecto al plano de soporte (8) en el que están colocados los sensores de medición de fuerza (5, 4), - el dispositivo de sujeción (29) se apoya en el marco intermedio (7) mediante un segundo par (13, 14) de palancas de soporte y pivotes (19 a 22), - el dispositivo de sujeción (29) tiene en una vista en planta una forma triangular y comprende un elemento de soporte angular (34) conectado de manera fija a una placa de sujeción (33) que se extiende perpendicularmente respecto al eje (23) del árbol de medición (2), - las palancas de soporte (11 a 14) están formadas por elementos planos rígidos situados entre los pivotes asociados (15 a 22), y - los pivotes (15 a 22) son en forma de posiciones débiles que se extienden linealmente con una sección transversal cóncava, que tienen ejes que se extienden de manera substancialmente perpendicular respecto a la dirección en la que las fuerzas aplicadas a los sensores de medición de fuerza (4, 5) son operativos, y - además el árbol de medición (2) se apoya en el marco intermedio (7) y el marco intermedio (7) en el marco estacionario (6) en una posición de soporte virtual respectiva (24, 25) formada mediante palancas de soporte (11, 12, 13, 14), caracterizado por el hecho de que - un primer segmento (42) de cada uno de los dos pivotes (20, 21) que conecta el segundo par de palancas de soporte (13, 14) al dispositivo de sujeción (29) está formado en el material del dispositivo de sujeción (29) y el segundo segmento restante (43) del pivote está formado en el material de la palanca de soporte respectiva (13, 14), - el primer segmento (42) del pivote (20, 21) está formado en el material de la placa de sujeción (33), - el primer segmento (42) del pivote (20, 21) forma el borde lateral de la placa de sujeción (33), en el que la superficie del primer segmento (42) del pivote (21, 22) se dirige substancialmente al plano de soporte (8) en el que los sensores de medición de fuerza (5, 6) están colocados, y - las superficies de los pivotes cóncavos (15 a 22) están dispuestos en las superficies laterales externas de los medios de soporte (3)
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E08012037.
Solicitante: SNAP-ON EQUIPMENT SRL A UNICO SOCIO..
Nacionalidad solicitante: Italia.
Dirección: Via Provinciale per Carpi, 33 42015 Correggio (RE) ITALIA.
Inventor/es: SOTGIU,PAOLO, Gucciardino,Lillo.
Fecha de Publicación: .
Fecha Solicitud PCT: 3 de Julio de 2008.
Clasificación Internacional de Patentes:
- G01M1/04B
Clasificación PCT:
- G01M1/04 FISICA. › G01 METROLOGIA; ENSAYOS. › G01M ENSAYO DEL EQUILIBRADO ESTATICO O DINAMICO DE MAQUINAS O ESTRUCTURAS; ENSAYO DE ESTRUCTURAS O APARATOS, NO PREVISTOS EN OTRO LUGAR. › G01M 1/00 Ensayo del equilibrado estático o dinámico de máquinas o estructuras. › Adaptación de conjuntos de soporte destinados a recibir el objeto a ensayar.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
PDF original: ES-2359111_T3.pdf
Fragmento de la descripción:
La invención se refiere a aparatos tal como se indica en el preámbulo de la reivindicación 1, tal como se conoce a partir de la patente EP 1 108 204 B1. El aparato conocido para medir fuerzas que se producen mediante un desequilibrio de un elemento rotatorio, comprende un árbol de medición que está soportado en un soporte giratorio de manera rotativa alrededor de su eje y a cuyo elemento rotatorio se fija para la operación de medición, y unos medios de soporte que tienen sensores de medición de fuerza para soportar el árbol de medición en un marco estacionario, en el que los medios de soporte tienen un marco intermedio en el que se soporta el árbol de medición en un plano de soporte que tiene sensores de medición de fuerza y, además, el árbol de medición se apoya en el marco intermedio y el marco intermedio en el marco estacionario en una respectiva posición de soporte virtual formada por palancas de soporte.
El aparato conocido proporciona la medición de resultados con una alta precisión.
El problema a resolver por la invención es proporcionar un aparato del tipo indicado en la parte introductoria de esta memoria, que tenga una estructura compacta y que se pueda producir fácilmente.
Ese problema se resuelve mediante las características de la reivindicación 1. Las reivindicaciones dependientes describen modificaciones ventajosas de la invención.
El marco intermedio se apoya en un marco estacionario mediante un par de palancas de soporte y pivotes en los respectivos extremos de las palancas de soporte. El árbol de medición también se apoya en el marco intermedio mediante un par de palancas de soporte y pivotes en los extremos de la palanca. Los ejes de los respectivos pivotes se extienden perpendicularmente respecto al plano en el que están colocadas las fuerzas aplicadas a los sensores de medición de fuerza y el eje del árbol de medición. El par de palancas de soporte que soportan el marco intermedio sobre el marco estacionario al mismo tiempo proporcionan una guía paralela del marco intermedio sobre el marco estacionario. Para ese propósito, las palancas de soporte se extienden en relación mutuamente paralelas. Sin embargo, es también posible que las palancas de soporte se coloquen en un ángulo entre sí, en el que el vértice del ángulo está preferentemente en el eje del árbol de medición o en la proximidad de ese eje del árbol de medición. Los pivotes de las palancas de soporte están entonces en las esquinas de un trapecio de la disposición en una vista en planta de las palancas de soporte. Esa disposición proporciona la posición virtual de soporte en el lado externo del elemento rotatorio. La posición virtual de soporte del árbol de medición en el marco intermedio, que está dentro del elemento rotatorio, en particular entre los planos de equilibrio, también se puede formar mediante palancas de soporte que están en un ángulo relativo entre sí y cuyos pivotes están en las esquinas de un trapecio en una vista en planta de la disposición de las palancas de soporte. Preferiblemente, las palancas de soporte son en forma de elementos planos de flexión rígida, por ejemplo elementos laminares de metal, elementos de fundición, elementos laminados planos y similares, que junto con los pivotes garantizan que las fuerzas se aplican a los sensores de medición de la manera deseada, por ejemplo de manera substancialmente lineal y coaxial. La disposición de soporte para el árbol de medición, es decir, un soporte rotativo en el que el árbol de medición está soportado de manera rotativa, un dispositivo de sujeción que conecta el soporte rotativo a las palancas de soporte, las palancas de soporte, pivotes asociados y el marco intermedio se pueden hacer de una sola pieza, especialmente en una pieza de fundición. Los elementos planos son de flexión rígida y sólo los pivotes interpuestos que se extienden de manera substancialmente lineal son de flexión elástica y forman muelles de pivote. Los pivotes están formados por posiciones débiles, por ejemplo constricciones, entre los elementos planos de flexión rígida. Eso forma ejes de pivote de flexión elástica entre los elementos planos de flexión rígida. Entonces, tal como se ha mencionado anteriormente, la disposición correspondiente en paralelo o en ángulo, consigue las posiciones de soporte virtual deseados que forman los ejes de soporte se extienden linealmente en los respectivos planos de soporte.
Las posiciones de soporte virtual son también las posiciones de medición que se tienen en consideración en el ordenador del marco principal de la máquina de equilibrio y que representa las posiciones de soporte virtuales.
Cada uno de los dos pivotes que conectan la par de palancas de soporte al soporte rotativo está formado parcialmente como un segmento en la estructura del dispositivo de sujeción que está fijamente conectado al soporte rotativo y el segmento restante del pivote está formado en la estructura de la palanca de soporte asociada.
Cada pivote actúa como un muelle de pivote y tiene una sección transversal cóncava, particularmente semicircular. Los dos segmentos de pivote que se forman en las estructuras del dispositivo de sujeción y de la palanca de soporte asociada pueden estar provistos de las mismas dimensiones y pueden tener una sección transversal de aproximadamente un cuarto de círculo.
La invención se describirá en mayor detalle a continuación mediante realizaciones con referencia a las figuras, en las que:
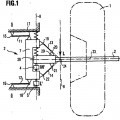
La figura 1 muestra esquemáticamente una primera realización, en la que se puede implementar la invención,
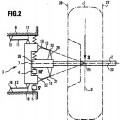
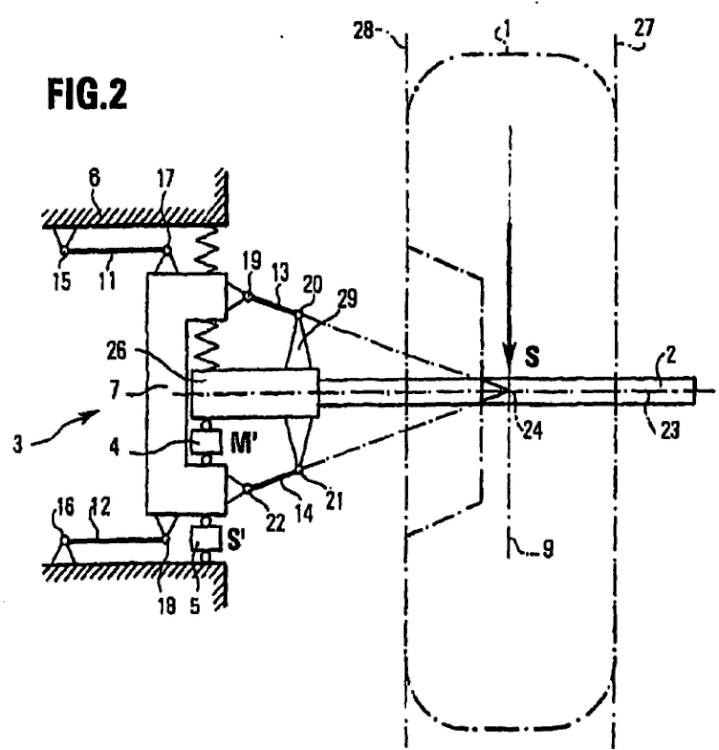
La figura 2 muestra esquemáticamente una segunda realización, en la que se puede implementar la invención,
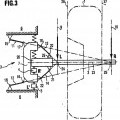
La figura 3 muestra esquemáticamente, en la que se puede implementar la invención,
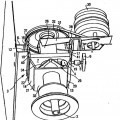
La figura 4 es una vista en perspectiva de la disposición de medición vista desde arriba, en la que está implementada la invención,
La figura 5 muestra una vista en planta de una disposición de soporte para el árbol de medición que incluye la invención, y
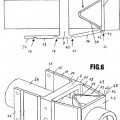
La figura 6 es una vista en perspectiva de la disposición de soporte de la figura 5 anterior.
Las figuras muestran vistas esquemáticas de un elemento rotatorio 1 que para la medición de desequilibrios está fijado a un árbol de medición 2 de forma conocida mediante medios de sujeción (no representados). El árbol de medición 2 está soportado de manera rotativa en un marco estacionario 6. Esto puede implicar el marco de la máquina de una máquina de equilibrado de ruedas. El soporte se consigue mediante unos medios de soporte 3 que se describirán en mayor detalle a continuación y que también tienen sensores de medición de fuerza 4, 5. Los medios de soporte 3 puede tener un soporte rotativo tubular 26 en el que el árbol de medición 2 está soportado de manera rotativa. El soporte rotativo 26 que recibe el árbol de medición 2 está rígidamente soportado en un primer plano de soporte 8 en un marco intermedio 7 mediante el sensor de medición de fuerza 4. Además, unas palancas de soporte 13, 14, que forman un par de palancas de soporte y que se extienden en un ángulo entre sí proporcionan una posición virtual de soporte 24 en un plano de soporte adicional 9. La posición de soporte 24 actúa como un eje de pivote que se extiende perpendicularmente respecto al eje 23 del árbol de medición 2 y perpendicularmente respecto a la dirección de aplicación de las fuerzas de reacción resultantes de la medición de desequilibrio, al sensor de medición de fuerza 4. En sus extremos, las palancas de soporte 13 y 14 están conectadas al marco intermedio 7 de manera pivotante (pivote 19 y 22) y al soporte rotativo 26 para el árbol de medición 2 de manera pivotante (pivotes 20, 21). Los ejes de pivote 19 a 22 se extienden paralelos respecto al eje de pivote que se forma en la posición virtual de soporte 24. La posición virtual de soporte 24 puede estar entre el elemento rotativo 1 y el plano de soporte 8, en el que los sensores de medición de fuerza 4 y 5 están dispuestos (figura 1). La posición virtual de soporte 24, sin embargo, también puede colocarse en la región del elemento rotativo, en particular entre planos de equilibrado 27 y 28 en los que se realiza el procedimiento de equilibrado, por ejemplo, colocando pesos de equilibrado (figura 2).
El marco intermedio 7 está soportado en el marco estacionario 6 mediante el sensor de medición de fuerza
5. El sensor de medición de fuerza 5 se pueden colocar en el plano de soporte 8, que es perpendicular... [Seguir leyendo]
Reivindicaciones:
1. Aparato para medir fuerzas que se producen por un desequilibrio de un elemento rotativo, que comprende
- un árbol de medición (2) que está soportado en un soporte rotativo (26) de manera rotativa alrededor de su eje (23) y al que el elemento rotativo (1) está fijado para la operación de medición, y unos medios de soporte (3) que tienen sensores de medición de fuerza (4, 5) para soportar el árbol de medición (2) en un marco estacionario (6), en el que
- los medios de soporte (3) tienen un marco intermedio (7) en el que se apoya el árbol de medición (2) en un plano de soporte que tiene un sensor de medición de fuerza (4),
- el marco intermedio (7) se apoya en el marco estacionario (6) mediante una sensor de medición de fuerza adicional (5) y mediante de un primer par (11, 12) de palancas de soporte y pivotes (15 a 18),
- el soporte rotativo (26) está conectado de manera fija a un dispositivo de sujeción rígido (29) en una separación axial respecto al plano de soporte (8) en el que están colocados los sensores de medición de fuerza (5, 4),
- el dispositivo de sujeción (29) se apoya en el marco intermedio (7) mediante un segundo par (13, 14) de palancas de soporte y pivotes (19 a 22),
- el dispositivo de sujeción (29) tiene en una vista en planta una forma triangular y comprende un elemento de soporte angular (34) conectado de manera fija a una placa de sujeción (33) que se extiende perpendicularmente respecto al eje (23) del árbol de medición (2),
- las palancas de soporte (11 a 14) están formadas por elementos planos rígidos situados entre los pivotes asociados (15 a 22), y
- los pivotes (15 a 22) son en forma de posiciones débiles que se extienden linealmente con una sección transversal cóncava, que tienen ejes que se extienden de manera substancialmente perpendicular respecto a la dirección en la que las fuerzas aplicadas a los sensores de medición de fuerza (4, 5) son operativos, y
- además el árbol de medición (2) se apoya en el marco intermedio (7) y el marco intermedio (7) en el marco estacionario (6) en una posición de soporte virtual respectiva (24, 25) formada mediante palancas de soporte (11, 12, 13, 14), caracterizado por el hecho de que
- un primer segmento (42) de cada uno de los dos pivotes (20, 21) que conecta el segundo par de palancas de soporte (13, 14) al dispositivo de sujeción (29) está formado en el material del dispositivo de sujeción (29) y el segundo segmento restante (43) del pivote está formado en el material de la palanca de soporte respectiva (13, 14),
- el primer segmento (42) del pivote (20, 21) está formado en el material de la placa de sujeción (33),
- el primer segmento (42) del pivote (20, 21) forma el borde lateral de la placa de sujeción (33), en el que la superficie del primer segmento (42) del pivote (21, 22) se dirige substancialmente al plano de soporte (8) en el que los sensores de medición de fuerza (5, 6) están colocados, y
- las superficies de los pivotes cóncavos (15 a 22) están dispuestos en las superficies laterales externas de los medios de soporte (3).
2. Aparato según la reivindicación 1, caracterizado por el hecho de que los segmentos (42, 43) tienen aproximadamente las mismas dimensiones.
3. Aparato según la reivindicación 1 ó 2, caracterizado por el hecho de que cada pivote (15 a 22) tiene una sección transversal semicircular.
4. Aparato según cualquiera de las reivindicaciones 1 a 3, caracterizado por el hecho de que los sensores de medición de fuerza (5, 4) están dispuestos de tal manera que las fuerzas aplicadas durante una medición se extienden a los sensores de medición de fuerza (5, 4) que tienen la misma dirección, particularmente a lo largo de una línea operativa.
5. Aparato según cualquiera de las reivindicaciones 1 a 4, caracterizado por el hecho de que el soporte rotativo (26), el dispositivo de sujeción (29), las palancas de soporte (11 a 14) y los pivotes asociados (15 a 22) están formados a partir de una pieza, en especial una pieza de fundición.
6. Aparato según cualquiera de las reivindicaciones 1 a 5, caracterizado por el hecho que los pivotes (15 a 22) están configurados para actuar como muelles de pivote.
Patentes similares o relacionadas:
DISPOSITIVO DE BLOQUEO DE UNA LLANTA DE RUEDA, del 16 de Noviembre de 2011, de CORGHI S.P.A.: Dispositivo de bloqueo de una llanta de rueda sobre una placa de soporte rotativa de llantas de rueda que presenta un orificio central de una máquina […]
 DISPOSITIVO PARA EL EMPLAZAMIENTO ANGULAR RELATIVO ENTRE UNA LLANTA Y UN NEUMATICO, del 2 de Diciembre de 2010, de SNAP-ON EQUIPMENT S.R.L.: Dispositivo para el emplazamiento angular relativo entre una llanta y un neumático que comprende: - al menos una herramienta de destalonado […]
DISPOSITIVO PARA EL EMPLAZAMIENTO ANGULAR RELATIVO ENTRE UNA LLANTA Y UN NEUMATICO, del 2 de Diciembre de 2010, de SNAP-ON EQUIPMENT S.R.L.: Dispositivo para el emplazamiento angular relativo entre una llanta y un neumático que comprende: - al menos una herramienta de destalonado […]
Aparato y método para suministrar a una persona información para ajustar de manera estática un vehículo motorizado equipado con ruedas acopladas con neumáticos, del 12 de Febrero de 2020, de NEXION S.p.A: Un aparato para suministrar información a una persona de servicio de neumáticos para ajustar de manera estática las ruedas o los neumáticos […]
Dispositivo para el soporte rotativo de piezas de trabao, en particular cigüeñales, del 11 de Octubre de 2018, de SCHENCK ROTEC GMBH: Dispositivo para recibir unas piezas de trabajo a ser equilibradas en una máquina de corrección de desequilibrio, con un dispositivo de cojinete dispuesto […]
Mecanismo de adaptación de maquinas monocilíndricas para la aplicación de esfuerzos multipunto de manera cuasiestática, del 20 de Junio de 2017, de UNIVERSIDADE DE VIGO: Mecanismo de adaptación de máquinas monocilíndricas para la aplicación de esfuerzos multipunto de manera cuasiestática, que consiste en dos conjuntos […]
Tuerca de sujeción rápida, en particular para la fijación de una rueda de vehículo al árbol de sujeción de una máquina equilibradora, del 23 de Noviembre de 2016, de Haweka AG: Tuerca de sujeción rápida , particularmente configurada para el montaje de una rueda de vehículo sobre el árbol de sujeción de una máquina equilibradora, con una parte […]
Máquina de equilibrado, del 23 de Noviembre de 2016, de CORGHI S.P.A.: Una máquina de servicio de ruedas, en particular una máquina de equilibrado, para llevar a cabo operaciones en una rueda que tiene una llanta y un neumático, […]
Dispositivo de sujeción con centrado de buje, del 5 de Octubre de 2016, de Haweka AG: Dispositivo de sujeción con centrado de buje para la fijación de una rueda de vehículo a un eje de una máquina de equilibrado con una brida de contacto con varios elementos […]