APARATO DE FRENO ANTIBLOQUEO PARA UNA MOTOCICLETA.
Un aparato de freno antibloqueo (1) para una motocicleta, incluyendo:
una unidad de obtención de velocidad de rueda (2) que obtiene la velocidad de rueda de las ruedas delantera y trasera (TF, TR), respectivamente; una unidad de cálculo de velocidad estimada del vehículo (32C) que calcula una velocidad estimada del vehículo en base a las velocidades de rueda obtenidas; y una unidad de cálculo de aceleración de rueda delantera (32A) que calcula una aceleración de rueda de la rueda delantera en base a la velocidad de rueda de la rueda delantera, donde se realiza control antibloqueo en base a las velocidades de rueda y la velocidad estimada del vehículo en las ruedas delantera y trasera, respectivamente, caracterizándose el aparato de freno antibloqueo porque: la unidad de cálculo de velocidad estimada del vehículo (32C) incluye además una unidad de determinación de fin de encabritamiento (32D) que determina que el encabritamiento ha terminado cuando se cumplen las siguientes condiciones de determinación (1) a (3): (1) la rueda delantera (TF) está bajo control no antibloqueo; (2) la velocidad de rueda de la rueda trasera (TR) es un valor de velocidad umbral (alpha) o superior más alta que la velocidad estimada del vehículo; y y (3) la aceleración de rueda de la rueda delantera (TF) es igual a o más alta que un valor umbral de aceleración (ß) cuando la unidad de determinación de fin de encabritamiento (32D) determina que el encabritamiento ha terminado, la velocidad estimada del vehículo se calcula en base solamente a la velocidad de rueda de la rueda trasera (TR) al menos durante un tiempo predeterminado
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E07002236.
B60T8/172TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60VEHICULOS EN GENERAL. › B60T SISTEMAS DE CONTROL DE FRENOS PARA VEHICULOS O PARTES DE ESOS SISTEMAS; SISTEMAS DE CONTROL DE FRENOS O PARTES DE ESOS SISTEMAS, EN GENERAL (control de sistemas de frenado electrodinámico B60L 7/00; control conjugado de frenos y otras unidades de accionamiento de vehículos B60W ); DISPOSICION DE ELEMENTOS DE FRENADO DE VEHICULOS EN GENERAL; DISPOSITIVOS PORTATILES PARA EVITAR EL MOVIMIENTO INDESEADO DE VEHICULOS; MODIFICACIONES REALIZADAS EN VEHICULOS PARA FACILITAR LA REFRIGERACION DE LOS FRENOS. › B60T 8/00 Disposiciones para adaptar la fuerza de frenado sobre la rueda a las condiciones propias del vehículo o al estado del suelo, p. ej. por limitación o variación de la fuerza de frenado (cambiando el número de cilindros de freno en acción en el sistema de frenado B60T 17/10). › Determinación de los parámetros de control utilizados para la regulación, p.ej. por cálculos que implican parámetros medidos o detectados.
B60T8/173B60T 8/00 […] › Eliminación o reducción del efecto de señales indeseadas, p.ej. debidas a ruidos eléctricos o a vibraciones.
B60T8/17P7
Clasificación PCT:
B60T8/17B60T 8/00 […] › Utilización de medios de regulación eléctricos o electrónicos para el control de la frenada.
B60T8/172B60T 8/00 […] › Determinación de los parámetros de control utilizados para la regulación, p.ej. por cálculos que implican parámetros medidos o detectados.
B60T8/173B60T 8/00 […] › Eliminación o reducción del efecto de señales indeseadas, p.ej. debidas a ruidos eléctricos o a vibraciones.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
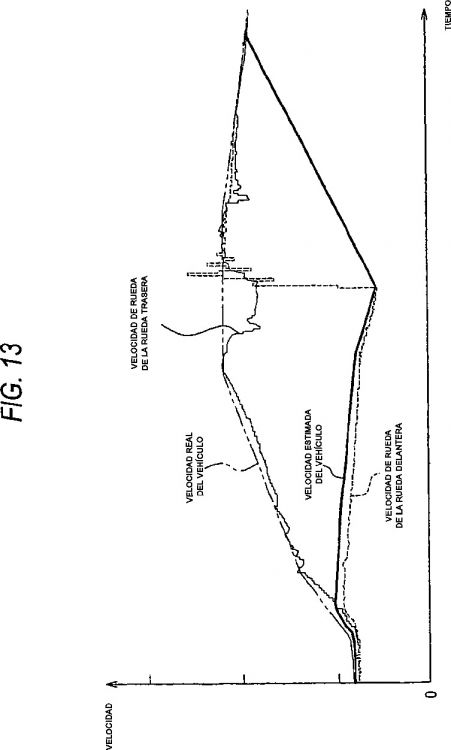
La presente invención se refiere a un aparato de freno antibloqueo para una motocicleta capaz de evitar el bloqueo de cada rueda de la motocicleta. 2. Descripción de la técnica relacionada Se conocen recientemente aparatos de freno antibloqueo para motocicletas en los que se evita que cada rueda se bloquee controlando adecuadamente una presión del freno aplicada a cada rueda usando una relación de deslizamiento, que se calcula a partir de una velocidad estimada del vehículo en base a la velocidad de rueda de una rueda delantera o una rueda trasera y la velocidad de rueda de una rueda que se desea controlar. Generalmente, el aparato de freno antibloqueo para una motocicleta calcula una velocidad estimada del vehículo en base a la velocidad de rueda de la rueda delantera. Dado que la rueda delantera es una rueda no accionada en un estado de control no antibloqueo, la velocidad estimada del vehículo puede ser calculada exactamente en base a la velocidad de rueda de una rueda no accionada aunque la velocidad de rueda de la rueda trasera sea más alta que una velocidad real del vehículo (velocidad real del vehículo) debido a un giro loco (giro de rueda) de la rueda trasera que es una rueda accionada. En el aparato general de freno antibloqueo antes descrito para una motocicleta, cuando la motocicleta está en un estado de encabritamiento (es decir, la motocicleta avanza con una rueda delantera elevada en el aire) por aceleración repentina, la motocicleta siempre está en un estado de control no antibloqueo dado que no se realiza una operación de frenado, y consiguientemente, una velocidad estimada del vehículo se calcula en base a la velocidad de rueda de la rueda delantera. En este caso, dado que la rueda delantera se eleva en el aire en el encabritamiento, la velocidad de rueda de la rueda delantera es muy baja, pero después de que la rueda delantera aterriza en tierra, la rueda delantera gira de repente según una velocidad real del vehículo, y así la velocidad de rueda de la rueda delantera aumenta rápidamente (a continuación, también denominado un salto de frecuencia). Así, existe el problema de que el salto de frecuencia se mal interpreta como ruido cuando la altura del salto de frecuencia es un valor inviable para una aceleración real. En el aparato general de freno antibloqueo, cuando se determina que el salto de frecuencia es ruido, la velocidad de rueda de la rueda delantera antes de la detección del ruido se fija como una velocidad baja, y la velocidad estimada del vehículo se calcula en base a la velocidad de rueda de la rueda delantera. Consiguientemente, cuando el salto de frecuencia antes descrito se mal interpreta como ruido, cuando se realiza control antibloqueo después del aterrizaje de la rueda delantera, la velocidad estimada del vehículo es más baja que la velocidad real del vehículo, y consiguientemente, existe el problema de que no se puede llevar a cabo un control antibloqueo apropiado. Para resolver el problema antes descrito en la técnica relacionada, se conoce una tecnología en la que se comparan unos con otros datos predeterminados (para ser más específicos, la velocidad de rueda de la rueda delantera antes de un proceso de filtración digital y la velocidad de rueda de la rueda trasera después del proceso de filtración digital) para identificar un salto de frecuencia de ruido, de modo que se pueda evitar la fijación de la velocidad de rueda de la rueda delantera a una velocidad baja anterior (patente japonesa examinada publicada número JP-A-10-203344). Para ser más específicos, en este aparato de freno antibloqueo, como se representa en la figura 13, cuando el encabritamiento se inicia acelerando la rueda trasera accionada, la rueda delantera no accionada se eleva en el aire para hacer que la velocidad de rueda de la rueda delantera tenga un valor bajo. Consiguientemente, la velocidad estimada del vehículo se calcula de modo que sea un valor más bajo que la velocidad real del vehículo. A continuación, cuando la rueda delantera aterriza en tierra, la velocidad de rueda de la rueda delantera hace un salto de frecuencia (aumento rápido hasta la velocidad real). En el aparato de freno antibloqueo antes descrito, el salto de frecuencia no se mal interpreta como ruido, y consiguientemente, el cálculo de la velocidad estimada del vehículo en base a la velocidad de rueda de la rueda delantera continúa. Sin embargo, generalmente, el cálculo de la velocidad estimada del vehículo está configurado para realizarse teniendo en cuenta el límite de la aceleración de la velocidad real del vehículo, y cuando la velocidad estimada del vehículo aumenta con una aceleración más alta que este límite de aceleración, como se representa en la figura, la velocidad estimada del vehículo está configurada para aumentar siguiendo una pendiente que tiene un ángulo correspondiente a la aceleración máxima. En esta tecnología descrita anteriormente, la velocidad estimada del vehículo aumenta siguiendo la pendiente que tiene un ángulo predeterminado después de que la rueda delantera aterriza en tierra. Consiguientemente, la velocidad estimada del vehículo puede ser adaptada a la velocidad real del vehículo cuando transcurre un tiempo predeterminado después del aterrizaje de la rueda delantera, en comparación con un caso donde el salto de frecuencia se mal interpreta como ruido para fijar la velocidad estimada del vehículo a un valor bajo anterior. Por lo tanto, es posible realizar un control antibloqueo apropiado a continuación. Sin embargo, en la técnica relacionada antes descrita, la velocidad estimada del vehículo aumenta siguiendo la pendiente que se establece considerando el limite de aceleración real de la velocidad del vehículo, y la velocidad estimada del vehículo tarda tiempo en llegar a la velocidad real del vehículo, y como resultado, se tarda tiempo en realizar un control antibloqueo apropiado después del encabritamiento. 2 ES 2 335 536 T3 DE 195 32521 también describe un aparato de freno antibloqueo que implica la detección de las velocidades de rotación de las ruedas delantera y trasera. Resumen de la invención En vista del problema anterior, un objeto de la presente invención es proporcionar un aparato de freno antibloqueo para una motocicleta capaz de realizar rápidamente un control antibloqueo apropiado incluso después del encabritamiento. Según una realización de la presente invención, se facilita un aparato de freno antibloqueo para una motocicleta, incluyendo: una unidad de obtención de velocidad de rueda que obtiene la velocidad de rueda de las ruedas delantera y trasera, respectivamente; una unidad de cálculo de velocidad estimada del vehículo que calcula una velocidad estimada del vehículo en base a las velocidades de rueda obtenidas; y una unidad de cálculo de aceleración de rueda delantera que calcula una aceleración de rueda de la rueda delantera en base a la velocidad de rueda de la rueda delantera, donde se realiza control antibloqueo en base a las velocidades de rueda y la velocidad estimada del vehículo en las ruedas delantera y trasera, respectivamente, caracterizándose el aparato de freno antibloqueo porque: la unidad de cálculo de velocidad estimada del vehículo incluye además una unidad de determinación de fin de encabritamiento que determina que el encabritamiento ha terminado cuando se cumplen las siguientes condiciones de determinación (1) a (3): (1) la rueda delantera está bajo control no antibloqueo; (2) la velocidad de rueda de la rueda trasera es más alta que la velocidad estimada del vehículo en un valor de velocidad umbral o más; y (3) la aceleración de rueda de la rueda delantera es igual o superior a un valor umbral de aceleración, y cuando la unidad de determinación de fin de encabritamiento determina que el encabritamiento ha terminado, la velocidad estimada del vehículo se calcula en base solamente a la velocidad de rueda de la rueda trasera al menos durante un tiempo predeterminado. Aquí, la velocidad de rueda de la rueda trasera es más alta que la velocidad estimada del vehículo en un valor de velocidad umbral o más no tiene la finalidad de limitar el método de procesado y significa que, como resultado, se cumple la relación antes descrita. En otros términos, como un método de determinar si la velocidad de rueda de la rueda trasera es más alta que la velocidad estimada del vehículo en un valor de velocidad umbral o más, se puede usar, por ejemplo, un método de determinar si la diferencia entre la velocidad de rueda de la rueda trasera y la velocidad estimada del vehículo es igual o mayor que un valor de velocidad umbral, un método de determinar si la velocidad de rueda de la rueda trasera es igual o más alta que la suma del valor de velocidad umbral y la velocidad estimada del vehículo, o un método de determinar si (velocidad de rueda de rueda trasera - valor de velocidad...
Reivindicaciones:
1. Un aparato de freno antibloqueo (1) para una motocicleta, incluyendo: una unidad de obtención de velocidad de rueda (2) que obtiene la velocidad de rueda de las ruedas delantera y trasera (TF, TR), respectivamente; una unidad de cálculo de velocidad estimada del vehículo (32C) que calcula una velocidad estimada del vehículo en base a las velocidades de rueda obtenidas; y una unidad de cálculo de aceleración de rueda delantera (32A) que calcula una aceleración de rueda de la rueda delantera en base a la velocidad de rueda de la rueda delantera, donde se realiza control antibloqueo en base a las velocidades de rueda y la velocidad estimada del vehículo en las ruedas delantera y trasera, respectivamente, caracterizándose el aparato de freno antibloqueo porque: la unidad de cálculo de velocidad estimada del vehículo (32C) incluye además una unidad de determinación de fin de encabritamiento (32D) que determina que el encabritamiento ha terminado cuando se cumplen las siguientes condiciones de determinación (1) a (3): (1) la rueda delantera (TF) está bajo control no antibloqueo; (2) la velocidad de rueda de la rueda trasera (TR) es un valor de velocidad umbral () o superior más alta que la velocidad estimada del vehículo; y y (3) la aceleración de rueda de la rueda delantera (TF) es igual a o más alta que un valor umbral de aceleración (ß) cuando la unidad de determinación de fin de encabritamiento (32D) determina que el encabritamiento ha terminado, la velocidad estimada del vehículo se calcula en base solamente a la velocidad de rueda de la rueda trasera (TR) al menos durante un tiempo predeterminado. 2. El aparato de freno antibloqueo para motocicleta según la reivindicación 1, donde a la condición de determinación de la unidad de determinación de fin de encabritamiento (32D) se añade, como una condición adicional, una condición en la que la velocidad de rueda de la rueda trasera (TR) aumenta más después de alcanzar un estado en el que la velocidad de rueda de la rueda trasera (TR) es el valor de velocidad umbral () o más más alta que la velocidad estimada del vehículo. 3. El aparato de freno antibloqueo según la reivindicación 1 o 2, incluyendo además una unidad de medición de tiempo (34E) que mide una duración en un estado en que la velocidad de rueda de la rueda trasera (TR) es el valor de velocidad umbral () o más más alta que la velocidad estimada del vehículo, donde a la condición de determinación de la unidad de determinación de fin de encabritamiento (34D) se añade, como una condición adicional, una condición en la que la duración medida por la unidad de medición de tiempo (34E) es mayor que un valor de tiempo umbral (Tb). 4. El aparato de freno antibloqueo según cualquiera de las reivindicaciones 1 a 3, incluyendo además una unidad de cálculo de aceleración de rueda trasera (35F) que calcula una aceleración de rueda de la rueda trasera (TF) en base a la velocidad de rueda de la rueda trasera, donde a la condición de determinación de la unidad de determinación de fin de encabritamiento (32D) se añade, como una condición adicional, una condición en la que la aceleración de rueda de la rueda trasera (TF) disminuye un valor predeterminado o más después de alcanzar un estado en el que la velocidad de rueda de la rueda trasera es el valor de velocidad umbral () o más más alta que la velocidad estimada del vehículo. 12 ES 2 335 536 T3 13 ES 2 335 536 T3 14 ES 2 335 536 T3 ES 2 335 536 T3 16 ES 2 335 536 T3 17 ES 2 335 536 T3 18 ES 2 335 536 T3 19 ES 2 335 536 T3 ES 2 335 536 T3 21 ES 2 335 536 T3 22 ES 2 335 536 T3 23 ES 2 335 536 T3 24 ES 2 335 536 T3
Patentes similares o relacionadas:
Estimación de rigidez de neumático y estimación de fricción de carretera, del 29 de Enero de 2020, de NIRA DYNAMICS AB: Procedimiento de determinación de al menos uno de entre un potencial de fricción y una rigidez de neumático de una rueda de un vehículo, comprendiendo […]
Método de derivación y aparato de derivación de aceleración lateral, y controlador de freno de vehículo de manillar, del 1 de Enero de 2020, de NISSIN KOGYO CO., LTD.: Un método de control de freno antibloqueo para un vehículo de manillar (V), incluyendo el método:
detectar una aceleración (S15) del vehículo de […]
Sistema de accionamiento eléctrico de un vehículo ferroviario con acumulador de energía electroquímica y eléctrica, del 14 de Noviembre de 2019, de Siemens Mobility GmbH: Sistema de accionamiento eléctrico de un vehículo ferroviario, donde el sistema de accionamiento comprende un acumulador de energía eléctrica y un acumulador de energía […]
Método para controlar y recuperar la adherencia de las ruedas de un eje controlado de un vehículo ferroviario, del 6 de Noviembre de 2019, de Faiveley Transport Italia S.p.A: Método para controlar y posiblemente recuperar la adherencia de las ruedas (W) de un eje (A) controlado de un vehículo ferroviario, que comprende las etapas de
[…]
Dispositivo de control de freno para vehículos con manillar, del 2 de Octubre de 2019, de NISSIN KOGYO CO., LTD.: Un dispositivo de control de freno para vehículos con manillar , incluyendo el dispositivo de control de freno:
una unidad […]
SISTEMA DE CONTROL DE UN VEHÍCULO, del 12 de Septiembre de 2019, de ALVAREZ TRONCOSO, Pablo: Sistema de control de un vehículo que comprende: - una célula inteligente con capacidad de almacenaje y transmisión de información del estado del […]
Un método para el método de ajuste dinámico de los parámetros de funcionamiento de un vehículo, del 24 de Mayo de 2019, de PIAGGIO & C. S.P.A.: Un método de ajuste dinámico mientras se conduce un vehículo de al menos un parámetro de funcionamiento del vehículo, el vehículo […]
Procedimiento para frenar un vehículo, del 9 de Abril de 2019, de Siemens Mobility GmbH: Procedimiento para operar un vehículo, el cual presenta los siguientes pasos del procedimiento:
- determinación de la masa total del vehículo en función […]
Utilizamos cookies para mejorar nuestros servicios y mostrarle publicidad relevante. Si continua navegando, consideramos que acepta su uso. Puede obtener más información aquí. .
 Estimación de rigidez de neumático y estimación de fricción de carretera, del 29 de Enero de 2020, de NIRA DYNAMICS AB: Procedimiento de determinación de al menos uno de entre un potencial de fricción y una rigidez de neumático de una rueda de un vehículo, comprendiendo […]
Estimación de rigidez de neumático y estimación de fricción de carretera, del 29 de Enero de 2020, de NIRA DYNAMICS AB: Procedimiento de determinación de al menos uno de entre un potencial de fricción y una rigidez de neumático de una rueda de un vehículo, comprendiendo […]