Aparato que comprende un eje y un manguito de equilibrado.
Un aparato que comprende un eje (21 ó 51 u 81) montado para la rotación y un manguito de equilibrado (23 ó 53 u 83) para equilibrar el eje durante la rotación,
caracterizado porque el manguito de equilibrado tiene un primer (25 ó 55 u 85) y segundo (29 ó 59 u 89) extremos separados axialmente, en donde el primer extremo está fijado al eje, de forma que el manguito de equilibrado sea substancialmente concéntrico con el eje y pueda girar con el eje, en donde el segundo extremo incorpora un peso de equilibrado para equilibrar el eje en las velocidades inferiores de rotación del eje en donde no existe substancialmente la flexión del eje, y en donde la rigidez en sentido longitudinal del manguito de equilibrado está adaptada a la rigidez en sentido longitudinal del eje para mantener el equilibrado del eje a velocidades más altas de rotación del eje, en donde existe una flexión del eje.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E09154259.
Solicitante: SIEMENS AKTIENGESELLSCHAFT.
Nacionalidad solicitante: Alemania.
Dirección: WITTELSBACHERPLATZ 2 80333 MUNCHEN ALEMANIA.
Inventor/es: Knowles,Grahame.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- F16F15/32 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F16 ELEMENTOS O CONJUNTOS DE TECNOLOGIA; MEDIDAS GENERALES PARA ASEGURAR EL BUEN FUNCIONAMIENTO DE LAS MAQUINAS O INSTALACIONES; AISLAMIENTO TERMICO EN GENERAL. › F16F RESORTES; AMORTIGUADORES; MEDIOS PARA AMORTIGUAR LAS VIBRACIONES. › F16F 15/00 Supresión de las vibraciones en los sistemas (dispositivos de suspensión de los asientos de vehículos B60N 2/50 ); Medios o dispositivos para evitar o reducir las fuerzas de desequilibrio, p. ej. debidas al movimiento (ensayo estático o equilibrado dinámico de máquinas o estructuras G01M 1/00). › Pesos de reglaje o masas de equilibrado o medios equivalentes para equilibrar la piezas rotativas, p. ej. las ruedas de vehículo.
- G01M1/32 FISICA. › G01 METROLOGIA; ENSAYOS. › G01M ENSAYO DEL EQUILIBRADO ESTATICO O DINAMICO DE MAQUINAS O ESTRUCTURAS; ENSAYO DE ESTRUCTURAS O APARATOS, NO PREVISTOS EN OTRO LUGAR. › G01M 1/00 Ensayo del equilibrado estático o dinámico de máquinas o estructuras. › por adición de material al objeto a ensayar, p. ej. por pesos correctores.
PDF original: ES-2384749_T3.pdf
Fragmento de la descripción:
Aparato que comprende un eje y un manguito de equilibrado Esta invención está relacionada con un aparato que comprende un eje y un manguito de equilibrado, tal como se conoce por ejemplo a partir del documento US-A1645323.
La invención encuentra su aplicación en un aparato motriz mecánico que comprende un eje de acoplamiento para acoplar una unidad motriz en un primer extremo del eje a una unidad accionada en un segundo extremo del eje, en utilización del aparato de la unidad motriz que hace girar el eje para accionar la unidad accionada.
Puede ser difícil el equilibrado del eje de acoplamiento para unas velocidades menores y para las superiores de rotación debido a la flexibilidad del eje. Esto se expondrá con referencia a las figuras 1 y 2.
En la figura 1, el disco 1 está montado sobre un eje 3, y las bridas de equilibrado 5, 7 están montadas sobre los extremos del eje. El eje está montado para la rotación alrededor de un eje Z. La distancia entre el disco 1 y las bridas 5, 7 es a y b respectivamente. El centro de gravedad cgdisc del disco 1 está desplazado verticalmente hacia arriba desde el eje A del disco 1 mediante una distancia edics (la excentricidad del disco 1) . El centro gravedad cabal de la brida 5 de equilibrado está desplazado verticalmente hacia abajo desde el eje A2 de la brida 5 mediante una distancia ebal (la excentricidad de la brida 5) . El desplazamiento del centro de gravedad de la brida 5 está debido a la adición de la brida del pero de equilibrado 9.
Para el equilibrado del eje 3, la fuerza centrífuga Cabal en la brida 5 (como resultado de su excentricidad) por la distancia a+b desde la brida 5 a la brida 7 tiene que ser igual a la fuerza centrífuga CFdisc que actúa sobre el disco 1 (como resultado de su excentricidad) por la distancia b desde el disco 1 a la brida 7, es decir CFball. (a+b) = CF disc.b (Ecuación 1) , o bien Mbal.w2 (a+b) = (Mdisc.edisc.w2.b (Ecuación 2) , en donde Mbal es la masa de la brida 5, Mdisc es la masa del disco 1, y w2 es la velocidad angular de rotación al cuadrado. Esto proporciona: Mbal.ebal = (b/ (a+b) ) .Mdisc.edisc (Ecuación 3) , es decir, para el equilibrado de la masa de la brida de equilibrado 5 multiplicado por la excentricidad de la brida 5 tiene que ser igual a b/ (a+b) por la masa del disco 1 multiplicado por la excentricidad del disco 1.
La Ecuación 3 mantiene el equilibrado a velocidades menores de rotación, pero en las altas velocidades un incremento del CFdisc (debido a un incremento de la velocidad) provoca el flexado del eje 3 tal como se muestra en la figura 2, que da lugar a una elevación en el desplazamiento d del disco 1 desde el eje A de rotación (el eje del eje 3 se denomina A3 en la figura 2) . La excentricidad del disco 1 incrementa realmente por tanto mediante d, creando una fuerza adicional que actúa sobre el disco, que es igual a Mdisc.d.w2, dando lugar en la Ecuación 3 que no puede mantener el equilibrado (se observará que existe un desplazamiento despreciable de las bridas de equilibrado 5, 7 a unas velocidades mas altas, de forma que el único incremento en las fuerzas centrifugas que actúan en las bridas 5, 7 a altas velocidades se debe al incremento de la velocidad. Asi pues, En las altas velocidades tiene lugar un error de equilibrado, el cual es proporcional al desplazamiento d del disco 1. No es posible equilibrar el eje 3 totalmente tanto a bajas como a altas velocidades del funcionamiento debido al flexado del eje.
De acuerdo con la presente invención se proporciona un aparato que comprende un eje montado para la rotación y un manguito de equilibrado para equilibrar el eje durante la rotación, caracterizado por el manguito de equilibrado que tiene un primer y segundo extremos separados axialmente, en donde el primer extremo está asegurado al eje de forma que el menguito de equilibrado sea substancialmente concéntrico con el eje y que gire con el eje, en donde el segundo extremo incorpora un peso de equilibrado para equilibrar el eje a velocidades inferiores de rotación del eje, en donde no existe substancialmente flexado del eje, en donde la rigidez en sentido longitudinal del manguito de equilibrado es proporcional a la rigidez en sentido longitudinal del eje para mantener el equilibrado del eje a altas velocidades de rotación del eje, en donde existe un flexado del eje.
Se describirá a continuación la invención, a modo de ejemplo, con referencia a los dibujos adjuntos en donde:
La figura 1, ya expuesta, ilustra un eje de acoplamiento sobre el cual está montado un disco parcialmente a lo largo del eje y las bridas de equilibrado que están montadas sobre los extremos del eje;
La figura 2, y expuesta, ilustra el eje de la figura 1 que se deflexiona a velocidades más altas de rotación del eje;
La figura 3 ilustra el concepto de la presente invención mediante el desarrollo de lo mostrado en las figuras 1 y 2;
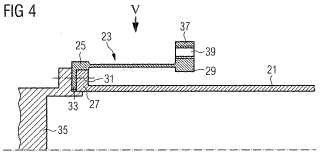
La figura 4 es una sección longitudinal parcial a través de un primer aparato motriz mecánico de acuerdo con la presente invención;
La figura 5 es una vista en la flecha V en la figura 4;
La figura 6 es una sección longitudinal parcial a través de un segundo aparato motriz mecánico de acuerdo con la presente invención;
La figura 7 es una sección transversal en la línea VII-VII en la figura 6;
La figura 8 es una sección longitudinal parcial a través de un tercer aparato motriz mecánico de acuerdo con la presente invención; y La figura 9 es una vista de la flecha IX en la figura 8.
Con referencia a la figura 3, la presente invención consigue el equilibrado del eje 3 tanto en las bajas como en las altas velocidades de rotación, mediante el uso del manguito 11 de equilibrado, en donde un extremo del mismo está fijado a la brida 5 de equilibrado. El peso de equilibrado 9 ya no se añade a la brida 5 sino al extremo libre del manguito 11, de nuevo verticalmente hacia abajo desde el eje A4 del manguito 11. De nuevo, el peso de equilibrado se selecciona para equilibrar el eje 3 a velocidades bajas de rotación en donde pueda existir un flexado despreciable del eje.
Al igual que antes, a altas velocidades, existirá un desplazamiento d del disco 1, pero esta vez, debido al flexado del manguito 11 de equilibrado, existirá también un desplazamiento y del peso de equilibrado en el extremo libre del manguito 11 en la direccion opuesta al desplazamiento d. Esto compensa el desplazamiento d tal como se expondrá a continuación.
Para mantener el equilibrado a velocidades más altas, CFball. (a+b) = CFdisc.b (Ecuación 4) , o Mbal. (ebal + y) .w2. (a+b) = Mdisc. (edisc +d) .w2.b (Ecuación 5) . La resta de la Ecuación 2 de la Ecuación 5 proporciona: Mbal.y.w2. (a+b) = Mdisc.d.w2.b (Ecuación 6) , o Mbal.y = (b/ (a+b) ) .Mdisc.d (Ecuación 7) . Ahora CFball = Sbal.y (Ecuación 8, en donde SBal es la rigidez del manguito 11 de equilibrado, y CFdisc = Sshaft.d (Ecuación 9) , en donde Sshaft es la rigidez del eje 3. La utilización de las Ecuaciones 8 y 9 para la substitución de CFball 7 CFdics en la Ecuación 1 proporciona: Sbal.y. (a+b) = Sshaft.d.b (Ecuación 10) , o bien (Sbal.y) / (Schaft) = (b/ (a+b) ) .d (Ecuación 11) . Utilizando la Ecuación 11 para sustituir en (b/a+b) ) .d En la Ecuación 7 proporciona: Mbal.y = Mdisc. (Sbal.y) /Sshaft) (Ecuación 12) , o bien Sbal = Sshaft. (Mbal/Misc) (Ecuación 13) . Asi pues, para mantener el equilibrado a altas velocidades, la rigidez del manguito 11 de equilibrado tiene que acoplarse al eje 3 de acuerdo con la Ecuación 13.
Tal como puede verse a partir de la Ecuación 13, en el caso simple de las figuras 1 y 3, la relación entre Sbal y Sshaft es independiente de la velocidad de rotación, y por tanto la adaptación de Sbal a Sshaft de acuerdo con la Ecuación 13 consigue el equilibrado del eje 3 para todas las velocidades de rotación. En los casos más complejos la adaptación de Sbal a Sshaft es más difícil. El eje A de rotación puede no pasar a través del eje 3 debido al flexado de los ejes de adaptación adicionales conectados a estos extremos. Esto tiene el efecto del incremento del desplazamiento d del disco 1. Asi pues, al adaptar la rigidez, el desplazamiento radial total de los centros de gravedad tiene que estar considerado. Esto puede ser complejo. A la vista de la dificultad en la rigidez de adaptación será ventajoso el tener disponible los manguitos de equilibrado de pruebas de distintas rigideces.
La selección de la rigidez del manguito de equilibrado se consigue de forma tal que el... [Seguir leyendo]
Reivindicaciones:
1. Un aparato que comprende un eje (21 ó 51 u 81) montado para la rotación y un manguito de equilibrado (23 ó 53 u 83) para equilibrar el eje durante la rotación, caracterizado porque el manguito de equilibrado tiene un primer (25 ó 55 u 85) y segundo (29 ó 59 u 89) extremos separados axialmente, en donde el primer extremo está fijado al eje, de forma que el manguito de equilibrado sea substancialmente concéntrico con el eje y pueda girar con el eje, en donde el segundo extremo incorpora un peso de equilibrado para equilibrar el eje en las velocidades inferiores de rotación del eje en donde no existe substancialmente la flexión del eje, y en donde la rigidez en sentido longitudinal del manguito de equilibrado está adaptada a la rigidez en sentido longitudinal del eje para mantener el equilibrado del eje a velocidades más altas de rotación del eje, en donde existe una flexión del eje.
2. Un aparato de acuerdo con la reivindicación 1 en donde: el aparato es un aparato motriz mecánico; el eje es un eje de acoplamiento (21 ó 51 u 81) para el acoplamiento a una unidad motriz (35 o 65 o 115) en un primer extremo (27 ó 57 u 87) del eje a una unidad accionada en un segundo extremo del eje, en uso del aparato de la unidad motriz haciendo rotar el eje para accionar la unidad accionada; en donde el manguito de equilibrado (23 ó 53 u 83) rodea el eje; el primer extremo (25 ó 55 u 85) del manguito está fijado al primer extremo o al segundo extremo del eje, y en donde el manguito se extiende parcialmente a lo largo del eje hacia el segundo extremo (29 ó 59 u 89) del manguito.
3. Un aparato de acuerdo con la reivindicación 2 en donde el primer/segundo extremo (27) del eje (21) al cual el primer extremo (25) del manguito (23) está fijado, incluyendo una brida circunferencial (31) que se extiende radialmente hacia fuera, en donde el primer extremo del manguito incluye una brida circunferencial (33) que se extiende radialmente hacia dentro, y en donde la brida circunferencial del manguito está adaptada para fijarse entre la brida circunferencial del eje y la unidad motriz/accionada (35) .
4. Un aparato de acuerdo con la reivindicación 3, en donde el segundo extremo (29) del manguito incluye una brida circunferencial (37) que se extiende radialmente hacia fuera, y en donde el segundo extremo del manguito incorpora un peso de equilibrado mediante la incorporación del peso de equilibrado en la brida circunferencial del segundo extremo del manguito.
5. Un aparato de acuerdo con la reivindicación 3 ó 4, en donde el manguito incluye axialmente unas ranuras que se extienden (41) para reducir la rigidez en sentido longitudinal del manguito.
6. Un aparato de acuerdo con la reivindicación 2, en donde el primer/segundo extremo (57) del eje (51) al cual el primer extremo (55) del manguito (53) está fijado incluye una brida circunferencial (61) que se extiende radialmente hacia fuera, en donde el primer extremo del manguito incluye una brida circunferencial (63) , en donde la brida circunferencial del eje está adaptada para fijarse entre la brida circunferencial del manguito y la unidad motriz/accionada (65) , y en donde el manguito está dividido en sentido longitudinal en un par de semi-manguitos (53a, 53b) de una sección transversal semicircular.
7. Un aparato de acuerdo con la reivindicación 6, en donde un perno de fijación (67) se extiende entre el par de semimanguitos en cada división en sentido longitudinal para ajustar (i) la concentricidad de los semimanguitos con respecto al eje, y (ii) la dimensión en la direccion circunferencial de las divisiones.
8. Un aparato de acuerdo con la reivindicación 6 ó 7, en donde el manguito que comprende el par de semimanguitos incluye en su segundo extremo (59) un anillo de bloqueo unitario (69) que bloquea conjuntamente el par de semi-manguitos, y el segundo extremo del manguito que incorpora el peso de equilibrado por la incorporación del peso de equilibrado en el anillo de bloqueo.
9. Un aparato de acuerdo con la reivindicación 6 ó 7 ó 8 en donde los semi-manguitos que comprenden el manguito incluyen unas ranuras que se extienden axialmente, y el posicionamiento de las ranuras con respecto a las divisiones en sentido longitudinal entre los semi-manguitos es tal que la rigidez en sentido longitudinal del manguito es el mismo en todas las direcciones radiales.
10. Un aparato de acuerdo con la reivindicación 2 en donde el primer/segundo extremos (87) del eje (81) al cual está fijado el primer extremo (85) del manguito (83) incluye una brida circunferencial (91) que se extiende radialmente hacia fuera, y en donde el manguito comprende una placa (93) adaptadora para estar fijada entre la brida circunferencial del eje y la unidad motriz/accionada (115) , un disco anular flexible (95) fijado a la placa adaptadora, y un tubo de equilibrado rígido (97) en cuyo extremo (99) está fijado al disco anular, en donde el otro extremo (101) del tubo de equilibrado comprende el segundo extremo (89) del manguito, en donde la rigidez en sentido longitudinal del manguito está determinada por la resiliencia del disco anular.
11. Un aparato de acuerdo con la reivindicación 10, en donde un lado (103) de la placa adaptadora incluye un primer numero de salientes separados circunferencialmente en forma axial (105) , en donde un lado (107) del disco
anular resiliente está fijado a los extremos de los primeros salientes, en donde un extremo del tubo de equilibrado incluye un segundo numero de salientes (109) separados circunferencialmente, en que el otro lado (111) del disco anular resiliente esta asegurado a los extremos de los segundos salientes, y las posiciones de fijación de los primeros salientes al disco anular son intermedios circunferencialmente en las posiciones de la fijación de los segundos salientes en el disco anular.
12. Un aparato de acuerdo con la reivindicación 10 o la reivindicación 11 en donde el segundo extremo del manguito incorpora un peso de equilibrado por la incorporación del peso de equilibrado en el otro extremo del tubo de equilibrado.
13. Un aparato de acuerdo con la reivindicación 10 ú 11 o la reivindicación 12, en donde la placa de adaptación 10 anular está dividida por la mitad en un par de placas adaptadoras semicirculares.
14. Un aparato de acuerdo con cualquiera de las reivindicaciones 2 a 13, en donde el eje comprende un tubo hueco (21 ó 51, ú 81) .
15. Un aparato de acuerdo con cualquiera de las reivindicaciones anteriores en donde el centro de gravedad del eje está desplazado del eje del eje en una primera direccion radial, y por el peso de equilibrado el centro de gravedad
del segundo extremo del manguito está desplazado del eje del manguito en una segunda direccion radial opuesta a la primera direccion radial de forma tal que se pueda equilibrar el eje a velocidades bajas de rotación del eje, en donde no exista flexión substancial del eje, y en donde la adaptación de la rigidez en sentido longitudinal del manguito con respecto del eje es tal que el desequilibrado potencial de eje a altas velocidades de rotación del eje debida al flexado del eje está desplazada por la flexión del manguito.
Patentes similares o relacionadas:
Dispensador de pesos en bobina adhesiva con doble sistema de carga, del 29 de Julio de 2020, de WEGMANN automotive GmbH: Dispositivo para entregar pesos de equilibrado para ruedas, comprendiendo el dispositivo al menos una unidad de partición configurada para entregar un peso de equilibrado […]
Conjunto de equilibrado con anillos de equilibrado para misil y misil provisto de dicho conjunto de equilibrado, del 22 de Mayo de 2019, de MBDA FRANCE: Un misil, caracterizado por que está provisto de un conjunto de equilibrado que incluye dos anillos de equilibrado (4A, 4B) destinados a ser montados […]
Peso de equilibrado autoadhesivo para una rueda de vehículo, del 3 de Abril de 2019, de WEGMANN automotive GmbH: Un peso de equilibrado autoadhesivo para una rueda de vehículo que tiene un cuerpo principal y una extensión del mismo, […]
Distribuidor automático de pesos de equilibrado, del 20 de Marzo de 2019, de WEGMANN automotive GmbH: Distribuidor automático de pesos de equilibrado que comprende una sección de transporte y una sección de corte , caracterizado […]
Aplicador de peso para rueda y método para su utilización, del 26 de Febrero de 2019, de ANDROID INDUSTRIES LLC: Aplicador de peso para una rueda (W) de un conjunto de neumático-rueda (TW), que comprende: una parte de brazo ; y una parte de […]
Peso de equilibrio autoadhesivo para una rueda de vehículo, del 30 de Enero de 2019, de WEGMANN automotive GmbH: Un peso de equilibrio autoadhesivo para una rueda de vehículo que tiene una superficie superior y una superficie inferior , siendo la superficie […]
DISPOSITIVO DE PEGADO DE CONTRAPESOS, del 14 de Diciembre de 2018, de VEGA 21 S.L: La presente invención se refiere a un dispositivo portátil de pegado de plomos que permite su fijación duradera y eficaz cuando se lleva a cabo el equilibrado […]
Un método para pronosticar el desbalance inicial en un anillo o disco con álabes, del 17 de Enero de 2018, de ROLLS-ROYCE PLC: Un método para pronosticar el desbalance inicial en un anillo o disco con álabes que comprende uno o más componentes de perfil aerodinámico, el método que comprende: definir […]