Disposición para el almacenamiento inteligente de embarcaciones y proceso que desarrolla.
El estacionamiento de los barcos en los amarres y fondeaderos fuera de temporada,
contribuye a un deterioramiento progresivo, tanto del casco como de las partes exteriores del barco, así como que el mismo en su conjunto puede ser objeto de acciones vandálicas al guardarse al aire libre. Estos inconvenientes quedan solucionados con la disposición preconizada, la cual con una tarjeta de identificación electrónica colocada en la embarcación y con la ayuda de un pallet y una plataforma elevadora robotizada, se traslada hasta un módulo de almacenamiento, situado en una estantería, todo ello en colaboración con un robot Forklift construido a base de una estructura tubular tipo Schroeder.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201430319.
Solicitante: INGENIERIA DE APLICACIONES, S.A..
Nacionalidad solicitante: España.
Inventor/es: SERIOLA RODAS,MIQUEL.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B63C15/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B63 BUQUES U OTRAS EMBARCACIONES FLOTANTES; SUS EQUIPOS. › B63C BOTADURA, VARADO, O PUESTA EN DIQUE SECO DE BUQUES; SALVAMENTO EN LA MAR; EQUIPOS PARA PERMANECER O TRABAJAR BAJO EL AGUA; MEDIOS DE LOCALIZACION O RECUPERACION DE OBJETOS SUMERGIDOS (redes flotantes, rampas de amerizaje flotantes o dispositivos similares para la recuperación de aviones del agua B63B 35/52). › Puesta en tierra de embarcaciones por medios diferentes de la puesta en dique seco.
- B63C3/00 B63C […] › Botadura o varado de buques por gradas de tierra, p. ej. por gradas de tierra; Slipways (guías a bordo de los buques para la maniobra de los botes salvavidas o similares B63B 23/30; grúas, cabrias o similares B66; elevación de embarcaciones para adaptarse a diferentes niveles de agua E02C).
- E04H6/18 CONSTRUCCIONES FIJAS. › E04 EDIFICIOS. › E04H EDIFICIOS O CONSTRUCCIONES SIMILARES PARA EMPLEOS PARTICULARES; PISCINAS PARA NADAR O PARA CHAPOTEAR; MASTILES; BARRERAS; TIENDAS O REFUGIOS PROVISIONALES, EN GENERAL (cimentaciones E02D). › E04H 6/00 Edificios para guardar vehículos, material rodante, aviones, barcos o cualesquiera otros vehículos, p. ej. garajes (tiendas que sirven para garajes E04H 15/00; soportes de bicicletas B62H; puesta en tierra de embarcaciones B63C 15/00; estructuras de las superficies portantes en el suelo E01C; marcado de las áreas de estacionamiento sobre el suelo E01F 9/00; construcción de edificios en general E04B 1/00). › con medios de transporte únicamente en sentido vertical o indiferentemente, en los sentidos, vertical y horizontal (E04H 6/14 tiene prioridad).
Fragmento de la descripción:
Disposición para el almacenamiento inteligente de embarcaciones y proceso que desarrolla.
Objeto de la Invención Más concretamente la invención se refiere a una disposición para el 5 almacenamiento de embarcaciones que comprende un conjunto de elementos tangibles, tales como estanterías de obra o bien metálicas, módulos en dicha estanterías, raíles, plataformas soportes, robots, grúas robotizadas, canales de acceso y salida, y una automatización de los elementos anteriores con un elemento intangible tal como una programación de los mismos mediante un software específico, que determina la respectiva 10 secuencia operativa Otro de los objetos de la invención es el procedimiento de funcionamiento que sigue la disposición anterior, y que recoge todas las operaciones realizadas por el conjunto de elementos que comprenden dicha disposición, para almacenar las embarcaciones o bien devolverlas a la mar nuevamente. 15
Otro de los objetos de la invención es un pallet robotizado, que permite todos los movimientos por el interior de la disposición, desde que el barco llega al almacén hasta que sale del mismo.
Estado de la Técnica Existen en el mercado y por tanto pueden considerarse como estado de la técnica, 20 una pluralidad de almacenes inteligentes como apoyo de centros logísticos, o bien formando parte de una unidad superior como una fábrica, supermercado y otros.
En dichos almacenes inteligentes priva la entrada de múltiples elementos o referencias, que deben ordenarse de manera programada, para posteriormente y también de forma programada ser rescatados de las estanterías del almacén y, ser transportados al 25 punto necesario de forma totalmente automática y prácticamente sin mano de obra.
Para el traslado de los elementos, se utiliza habitualmente en dichos almacenes inteligentes una carretilla robotizada, con los medios correspondientes para ensartar el trasiego de dichos elementos, desde el módulo correspondiente de la estantería oportuna y, depositarlo después de un recorrido determinado por el almacén hasta el punto 30 programado.
Sin embargo no se conoce en el estado de la técnica almacenamientos inteligentes para embarcaciones, que como consecuencia de ser elementos muy distintos a los habituales por su tamaño peso y geometría, precisan de parte de los elementos conocidos, pero proyectados con unas características totalmente distintas a lo convencional y 35 perteneciendo al estado de la técnica.
Por otra parte, el estacionamiento de los barcos en los amarres y fondeaderos durante largos períodos de tiempo, es nocivo para el casco de los mismos, y otros elementos de la cubierta que sufren las inclemencias del tiempo, y otras acciones vandálicas, lo cual presupone un problema para el conjunto de la embarcación, lo cual en 40 la actualidad, el estado de la técnica responde con simples almacenes en los que se guardan las embarcaciones, colocadas encima de caballetes provistos de ruedas.
La entrada o salida de un barco del almacén cuando el mismo está lleno, obliga a mover o sacar del almacén a uno o más barcos para después volverlos a introducir nuevamente.
Finalidad de la Invención Una finalidad de la invención es la solución a los problemas anteriores mediante la 5 disposición para el almacenamiento inteligente de embarcaciones de la presente invención, que permita utilizar elementos conocidos a nivel conceptual, pero profundamente modificados y, combinarlos con otros de nuevos, propios y específicos al nuevo fin de almacenamiento y dispensación de embarcaciones de hasta 9 metros y 5 toneladas de peso, en un tiempo no superior a 10 minutos desde su llegada al canal de entrada al 10 módulo de almacenamiento, y posteriormente de este al canal de salida.
Todo lo anterior es posible mediante la gestión de los distintos movimientos por el interior del almacén de un nuevo robot, diseñado para el traslado de la embarcación por el interior del almacén, con capacidad auto adaptativa, es decir cambiar de soportes y traslado de todo tipo de embarcaciones, desde el mar hasta unos módulos de 15 almacenamiento, situados en el almacén inteligente.
Descripción de la Invención En la presente descripción los términos "plataforma PT", "plataforma elevadora PT", o simplemente "PT", están referidos y constituyen la "plataforma elevadora robotizada PT" de la invención. 20
En la presente descripción los términos "Pallet PR", "pallet de recepción PR" , o "PR", están referidos y constituyen el "pallet de recepción de embarcaciones PR" de la invención.
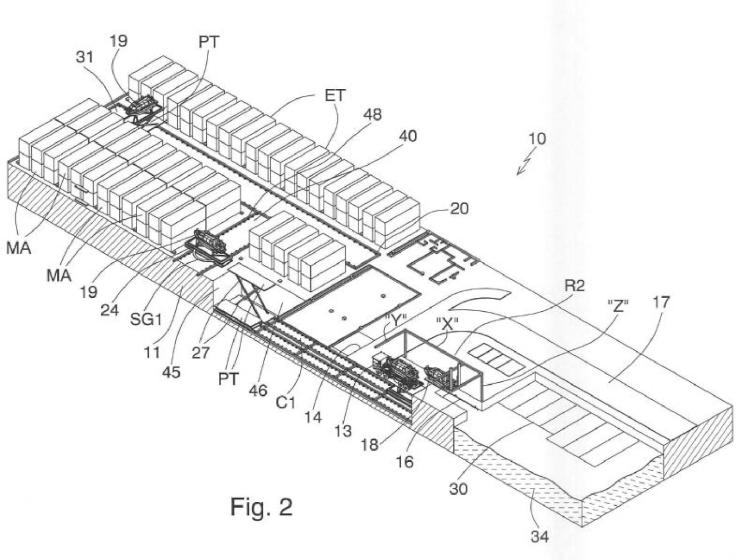
La disposición de la presente invención comprende un sistema de captación de los elementos (embarcaciones) de forma individual y su traslación a estanterías ET, para 25 posteriormente ser levantadas de dichas estanterías y ser servidas nuevamente a los usuarios, todo ello en colaboración con una o más plataformas elevadoras robotizadas PT deslizándose de forma totalmente programada por sendos railes o medios equivalentes, donde de forma totalmente automática y programada atendiendo a distintas tipologías de embarcaciones, preferentemente de los cascos de las mismas, traslada desde el mar o 30 bien desde tierra dichas embarcaciones, hasta dichas estanterías ET y sus correspondientes módulos MA, con auxilio de los elementos siguientes:
- Robot grúa R1 para sacar la embarcación del agua y depositarla en una plataforma elevadora robotizada PT que lleva sobre la misma un pallet de recepción PR dotado de puntales giratorios y regulables en altura, situado PT en el fondo de un canal de entrada 35 C1.
- Canal de entrada C1 en cuyo fondo se sitúa la plataforma PT encima de un juego de railes paralelos.
- Pallets de recepción PR con juego de puntales con brazos con capacidad de giro y regulación en altura, situados en la base superior de dicho pallet de recepción PR. 40
- Canal de salida de embarcaciones C2.
- Equipo de limpieza de las embarcaciones preferentemente de su casco mediante agua a presión, trabajando en colaboración con un equipo de secado del mismo mediante aire a presión, en el interior del canal de entrada C1.
- Robot grúa R2, tipo Forklift de cuatro ejes para embarcaciones hasta 9 metros de longitud y 5 t de peso.
- Soporte giratorio SG1 para recibir pallets de recepción PR.
- Estanterías ET con sus módulos MA para almacenamientos de embarcaciones.
- Juego de raíles en los pasillos, situados dichos pasillos entre estanterías ET. 5
La disposición preconizada ha sido diseñada para almacenar barcos con dos alternativas posibles totalmente equivalentes:
1ª Alternativa, disposición con acceso directo al mar, que denominaremos RADM.
2ª Alternativa, disposición con acceso indirecto al mar, con auxilio de un robot grúa, que denominaremos RAIDM. 10
En la primera alternativa, la disposición preconizada estará en contacto directo con el mar, con lo cual las embarcaciones entrarán directamente desde el mar hacia el canal o canales y después al almacén, en la segunda alternativa es necesario una grúa robotizada para el traslado de la embarcación desde el fondeadero o amarre hasta el canal correspondiente, salvando la lengua de tierra firme, que existe entre el fondeadero o 15 amarre hasta el almacén.
En la primera alternativa se parte de barcos flotando en el agua y situados en muelles de amarre frente al almacén, los cuales son introducidos automáticamente, desde el mar donde están fondeados los mismos hasta un canal de acceso directamente, y luego son extraídos del extremo opuesto de dicho canal, depositándolos en un soporte giratorio 20 SG1, y posteriormente en una plataforma elevadora PT robotizada y motorizada, trasladándose dicha plataforma elevadora (PT) y el pallet de recepción PR con el barco encima de él, hasta el módulo MA oportuno, en la correspondiente estantería ET de forma totalmente automática, merced a raíles colocados en el suelo del almacén por los que circula dicha plataforma elevadora PT, hasta encontrar dicho módulo y estantería. 25
Cuando el usuario del barco precisa nuevamente de él, y por tanto su salida del almacenamiento para dejarlo en al mar, se programa según la primera de las alternativas RADM con el mismo sistema, pero en orden inverso y, cambiando solo de canal, o bien con el uso de un único canal con ancho suficiente para que puedan circular dos barcos simultáneamente, y devolverlos nuevamente al mar, en el fondeadero frente al almacén, o 30 bien en los amarres correspondientes.
El robot R1 en la primera alternativa RADM traslada la embarcación de su amarre o fondeadero limítrofe al almacén y, lo deposita en un canal que llamaremos de entrada C1, situado en tierra firme,...
Reivindicaciones:
1ª - "DISPOSICION PARA EL ALMACENAMIENTO INTELIGENTE DE EMBARCACIONES Y PROCESO QUE DESARROLLA" de las que comprenden un sistema de captación de los elementos de forma individual y su traslación a sendas estanterías para posteriormente ser levantadas de dichas estanterías y ser servidas a los 5 usuarios, todo ello en colaboración con una o más plataformas elevadoras robotizadas PT, deslizándose de forma totalmente programada por sendos railes o medios equivalentes caracterizada en que de forma totalmente automática y programada atendiendo a distintas tipologías de embarcaciones, preferentemente de los cascos de las mismas, traslada desde el mar o bien desde tierra dichas embarcaciones, hasta sendas estanterías ET y 10 módulos correspondientes MA en dichas estanterías RT, con auxilio de los elementos siguientes:
- Robot grúa R1 para sacar la embarcación del agua y depositarla en una plataforma elevadora robotizada PT que lleva sobre la misma un pallet también robotizado PR dotado de puntales giratorios y regulables en altura, situado PT en el fondo de un canal de entrada 15 C1.
- Canal de entrada C1 en cuyo fondo se sitúa la plataforma PR encima de un juego de railes paralelos.
- Pallets de recepción PR, con juego de puntales con brazos con capacidad de giro y regulación en altura, situados en la base superior de dicho pallet de recepción PR. 20
- Canal de salida de embarcaciones C2.
- Equipo de limpieza de las embarcaciones preferentemente de su casco mediante agua a presión, trabajando en colaboración con un equipo de secado del mismo mediante aire a presión, en el interior del canal de entrada C1.
- Robot grúa R2, tipo Forklift de cuatro ejes para embarcaciones hasta 9 metros de 25 longitud y 5 t de peso.
- Soporte giratorio SG1 para recibir pallets de recepción PR.
- Estanterías ET con sus módulos MA para almacenamientos de embarcaciones.
- Juego de raíles en los pasillos, situados dichos pasillos entre estanterías ET.
2ª - "DISPOSICION PARA EL ALMACENAMIENTO INTELIGENTE DE 30 EMBARCACIONES Y PROCESO QUE DESARROLLA" según la 1ª reivindicación caracterizada en que los canales de entrada y salida C1 y C2 respectivamente quedan por debajo de la plataforma de tierra de la disposición, mediante un túnel que pasa por debajo de los medios de acceso.
3ª - "DISPOSICION PARA EL ALMACENAMIENTO INTELIGENTE DE 35 EMBARCACIONES Y PROCESO QUE DESARROLLA" según la 1ª reivindicación caracterizada en que alternativamente a la disposición se accede directamente desde el mar a los canales C1 y C2.
4ª - "DISPOSICION PARA EL ALMACENAMIENTO INTELIGENTE DE EMBARCACIONES Y PROCESO QUE DESARROLLA" según la 1ª reivindicación 40 caracterizada en que el robot grúa R2, es una estructura tubular tipo Schroeder, capaz de soportar las correspondientes cargas de trabajo, específicas de las embarcaciones a almacenar 5T aproximadamente, con manipulador de embarcaciones, sistema auto controlado de cuatro ejes, sistema de elevación auto-guiada con cadena de dichas embarcaciones y accionado eléctricamente mediante un motor reductor.
5ª - "DISPOSICION PARA EL ALMACENAMIENTO INTELIGENTE DE EMBARCACIONES Y PROCESO QUE DESARROLLA" según las reivindicaciones 1ª y 4ª caracterizada en que el sistema de traslación o eje "X" del robot grúa R2, será 5 accionado con motor reductor eléctrico y controlado desde el equipo principal de la instalación, soportado mecánicamente sobre la estructura tubular, mientras que los sistemas de guía se ejecutarán mediante rodillos y cojinetes de apoyo a la estructura tratada para tal fin.
6ª - "DISPOSICION PARA EL ALMACENAMIENTO INTELIGENTE DE 10 EMBARCACIONES Y PROCESO QUE DESARROLLA" según las 1ª y 4ª reivindicaciones caracterizada en que el sistema de traslación o eje "Y" del robot grúa R2, opera mediante guías apoyadas directamente en la superficie de la plataforma, con sistema de guiado mediante una unidad tractora con motor reductor y, las correspondientes ruedas motrices de apoyo en forma de "U". 15
7ª - "DISPOSICION PARA EL ALMACENAMIENTO INTELIGENTE DE EMBARCACIONES Y PROCESO QUE DESARROLLA" según las 1ª y 4ª reivindicaciones caracterizada en que el cuarto eje del robot grúa R2 será accionado eléctricamente con un sistema de accionamiento rotativo para separar las palas de recogida de la embarcación, separando las palas una de otra, con un punto de rotación fijo, con auto-centrado del 20 esfuerzo en dicho punto.
8ª - "DISPOSICION PARA EL ALMACENAMIENTO INTELIGENTE DE EMBARCACIONES Y PROCESO QUE DESARROLLA" según la 1ª reivindicación caracterizada en que los canales C1 y C2 y sobre su fondo incorporan un juego de raíles, sobre los que deslizan las plataformas elevadoras PT y la embarcación correspondiente, 25 iniciando el recorrido de la plataforma PT antes del túnel y finalizando dicho recorrido en el extremo del canal C1.
9ª - "DISPOSICION PARA EL ALMACENAMIENTO INTELIGENTE DE EMBARCACIONES Y PROCESO QUE DESARROLLA" según la 1ª reivindicación caracterizada en que la plataforma elevadora robotizada PT está equipada con brazos 30 organizados en forma de tijera, que se apoyan en respectivos pasamanos, los extremos de dichos brazos se mueven mediante el correspondiente tornillo sin fin, y el giro correspondiente queda reservado a sendos electromotores, programados para actuar hasta que el pallet de recepción PT esté a la altura de los módulos de almacenamiento MA en las estanterías ET. 35
10ª - "DISPOSICION PARA EL ALMACENAMIENTO INTELIGENTE DE EMBARCACIONES Y PROCESO QUE DESARROLLA" según las 1ª y 9ª reivindicaciones caracterizada en que la plataforma elevadora robotizada PT consta de dos plataformas relacionadas mediante brazos organizados en forma de tijera, que giran mediante un tornillo sin fin accionados mediante los correspondientes motores reductores e incorpora 40 una tercera plataforma de apoyo, incorpora unos puntales, situados en las inmediaciones de las bases mayores de dicha plataforma, que son los encargados de recibir el casco del barco.
11ª - "DISPOSICION PARA EL ALMACENAMIENTO INTELIGENTE DE EMBARCACIONES Y PROCESO QUE DESARROLLA" según las reivindicaciones 1ª, 9ª y 45 10ª reivindicaciones caracterizada en que los puntales dentro de su cuerpo general presentan un brazo giratorio levemente inclinado hacia arriba con dos grados de libertad, el primero permite que el brazo pueda girar en la dirección de avance del barco unos 15º
aproximadamente, a la vez que los brazos merced a unas gomas deformables que los rodean compensan las diferencias de altura de los diferentes tipos de casco de las oportunas embarcaciones.
12ª - "DISPOSICION PARA EL ALMACENAMIENTO INTELIGENTE DE EMBARCACIONES Y PROCESO QUE DESARROLLA" según la 1ª reivindicación 5 caracterizada en que para poder facilitar la transferencia de las embarcaciones desde la plataforma PR al módulo MA, se disponen de un par de raíles dotados de rodillos o ruedas giratorias coordinadas mediante las respectivas cadenas que reciben los barcos y los trasladan hacia adentro, en el módulo de almacenamiento.
13ª - "DISPOSICION PARA EL ALMACENAMIENTO INTELIGENTE DE 10 EMBARCACIONES Y PROCESO QUE DESARROLLA" según la 1ª caracterizada en que colindante con los canales C1 y C2 y en la zona de distribución, se encuentra un soporte giratorio SG1, dotado de rodillos o cilindros giratorios cuyos extremos se encuentran en un faldón circular, vertical, que les sirve de apoyo y en cuyo interior el del faldón se incorporan oportunos rodamientos, la función del soporte giratorio SG1 es posicionar la embarcación 15 que descansa en una plataforma PR, desde una posición a otra con 90º de orientación en ambos sentidos, ya que la embarcación, puede ir a un pasillo o a otro, merced a que la plataforma PR dispone entre otros, de unos medios de autopropulsión, por ejemplo uno más motores eléctricos gobernados por el software correspondiente.
14ª - "PROCESO QUE DESARROLLA LA DISPOSICIÓN PARA EL ALMACENAMIENTO 20 INTELIGENTE DE EMBARCACIONES" caracterizado en que el proceso comprende las operaciones siguientes:
- Llegada de la embarcación al fondeadero o muelle de amarre situados en línea de mar.
- Llamada del usuario o propietario de la embarcación al almacén inteligente, para su entrega. 25
- Colocación por el personal de la disposición de una tarjeta de identificación de la embarcación.
- Actuación de un robot grúa R1, con traslado de la embarcación desde el fondeadero o muelle de atraque hasta el canal de entrada C1, situándose la embarcación encima del pallet PR. 30
- Alineación de los puntales de apoyo del casco en giro y altura situados en la plataforma superior del pallet.
- Limpieza del casco mediante agua a presión.
- Secado del casco de la embarcación mediante aire a presión.
- Deslizamiento del pallet PR y la embarcación situada en su parte superior hasta el 35 extremo del canal de entrada C1.
- Evacuación de la embarcación situada encima de la plataforma situada encima de PR, mediante brazos dispuestos en tijera y deslizamiento de dicha plataforma sobre un lecho de rodillos con el auxilio de R2 y colocación de la plataforma y embarcación encima del soporte giratorio SG1. 40
- Deslizamiento de SG1 y la plataforma mediante raíles y ruedas con la embarcación a derecha y a izquierda por los correspondientes railes en la zona de distribución.
- Giro de 90º de la embarcación en SG1.
- Movimiento del pallet PR con la embarcación encima por el pasillo entre estanterías ET, por los correspondientes railes, y levantamiento de la plataforma con dicha embarcación hasta situarla a la altura del módulo de almacenamiento programado.
- Traslación desde la plataforma hasta el interior del modulo de almacenamiento de la embarcación. 5
Patentes similares o relacionadas:
PARQUEADERO DOBLE MOTORIZADO PARA MOTOCICLETAS, del 2 de Julio de 2020, de SOLUCIONES INTELIGENTES DE PARQUEO SAS: La presente invención pertenece al campo de los apoyos de ciclos; soportes o fijaciones para el aparcado o el almacenado de ciclos; dispositivos […]
Chasis de transferencia de vehículos para sistemas de aparcamiento mecánicos, del 1 de Julio de 2020, de Sotefin Patents SA: Un chasis de transferencia de vehículos para sistemas mecánicos automáticos de aparcamiento que comprende: - al menos un bastidor ; - medios de manipulación […]
Sistema de estacionamiento., del 28 de Febrero de 2018, de SUAREZ MORALES,JUAN ANTONIO: 1. Sistema de estacionamiento, que se instala en garajes o sótanos donde se estaciona todo tipo de vehículos, y donde dicho garaje o sótano tiene una anchura reducida y un […]
Almacen automatizado de niveles multiples, del 14 de Septiembre de 2016, de Dematic GmbH: Un sistema automatizado de almacenaje/recuperación comprende: un primer estante multinivel (14L) y un segundo estante […]
Instalación de aparcamiento, del 20 de Noviembre de 2013, de OTTO WOHR GMBH: Instalación de aparcamiento automática para automóviles que está construida de módulos y comprende al menos dos módulos de almacenamiento […]
 PARKING ROBOTIZADO, del 19 de Abril de 2012, de LOYZAGA GAITANO, FRANCISCO: Especialmente concebido para permitir almacenar vehículos de forma automatizada, si bien es aplicable en otras instalaciones, todo ello merced a una estructuración que permite […]
PARKING ROBOTIZADO, del 19 de Abril de 2012, de LOYZAGA GAITANO, FRANCISCO: Especialmente concebido para permitir almacenar vehículos de forma automatizada, si bien es aplicable en otras instalaciones, todo ello merced a una estructuración que permite […]
Procedimiento para la realización de una construcción subterránea, del 28 de Marzo de 2012, de HERRENKNECHT AG: Procedimiento para la realización de una construcción subterránea, caracterizado porque es excavado un pozo en el lugar de construcción y el pozo es cerrado con una cubierta […]
DISPOSITIVO PARA LA MANIPULACIÓN DE AUTOMÓVILES EN APARCAMIENTOS DE VARIAS PLANTAS CON UN SISTEMA DE ELEVACIÓN MEJORADO, del 15 de Noviembre de 2011, de SPS Park SA: Dispositivo para la manipulación de automóviles en aparcamientos de varias plantas, que comprende un carro delantero que puede colocarse […]