Sistema para el ajuste automático de un espacio de separación entre un vehículo motorizado y un remolque acoplado al mismo.
Un sistema para el ajuste automático de un espacio de separación (1) entre un vehículo motorizado (2) y un remolque (3) acoplado al mismo,
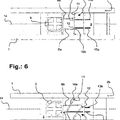
que comprende una lanza de tracción (4) de longitud ajustable con un tubo de tracción (5) y un ojete de tracción (6) dispuesto en un extremo del mismo, pudiendo desplazarse el ojete de tracción (6) respecto al tubo de tracción (5) mediante un actuador (7) en el eje longitudinal del vehículo a lo largo de un recorrido de desplazamiento predeterminado, así como una unidad de control,
siendo la unidad de control un aparato de control electrónico (8), que está conectado a un indicador de velocidad (9) para el procesamiento de una señal de velocidad y que está conectado al actuador (7)
caracterizado por que en el aparato de control electrónico (8) está depositada una curva característica, que representa un ajuste funcional constante del espacio de separación (1) en función de la velocidad de marcha actual.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E12150872.
Solicitante: JOST-WERKE GMBH..
Nacionalidad solicitante: Alemania.
Dirección: SIEMENSSTRASSE 2 63263 NEU-ISENBURG ALEMANIA.
Inventor/es: RICHTER, MARTIN, ALGUERA GALLEGO, JOSE MANUEL.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B60D1/155 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60D CONEXIONES PARA VEHICULOS (elementos de los sistemas de frenos B60T 17/04). › B60D 1/00 Conexión de tracción; Enganches; Organos de tracción; Dispositivos de remolque (dispositivos particulares para el enganche de tractores a las máquinas o a los instrumentos agrícolas A01B 59/00; acoplamientos de la quinta rueda B62D). › que comprenden partes telescópicas o plegables.
- B60D1/167 B60D 1/00 […] › constituidos por barras o tubos articulados o montados de forma rígida y formando un órgano de tracción en forma de V, de Y o de U (B60D 1/173 tiene prioridad).
- B60D1/62 B60D 1/00 […] › que comportan conducciones de alimentación, circuitos eléctricos o análogos.
PDF original: ES-2540729_T3.pdf
Fragmento de la descripción:
Sistema para el ajuste automático de un espacio de separación entre un vehículo motorizado y un remolque acoplado al mismo La invención se refiere a un sistema para el ajuste automático de un espacio de separación entre un vehículo motorizado y un remolque acoplado al mismo, que comprende una lanza de tracción de longitud ajustable, en particular telescópica, con un tubo de tracción y un ojete de tracción dispuesto en un extremo del mismo, pudiendo desplazarse el ojete de tracción respecto al tubo de tracción mediante un actuador en el eje longitudinal del vehículo a lo largo de un recorrido de desplazamiento predeterminado, así como una unidad de control.
El vehículo motorizado y el remolque forman en el estado acoplado entre sí un conjunto de vehículos o un vehículo articulado, estando realizado tanto el vehículo motorizado como el remolque con un espacio de carga en forma de caja, de altura elevada, para maximizar el volumen de transporte. En particular, en desplazamientos rectos rápidos se generan considerables remolinos y turbulencias alrededor del espacio de separación entre el vehículo motorizado y el remolque, que influyen de forma negativa en el consumo de combustible y las emisiones contaminantes. No obstante, una reducción del espacio de separación solo es posible en desplazamientos rectos del vehículo articulado, puesto que al ir en curvas existe el peligro de una colisión entre el remolque y el vehículo motorizado. Por consiguiente, después de una reducción del espacio de separación durante el servicio de marcha es imprescindible restablecer en caso de una frenada de pánico o de una maniobra evasiva nuevamente un espacio de separación suficientemente grande, entendiéndose por el concepto "automático" un ajuste del espacio de separación de forma inmanente al sistema, es decir, sin intervención por parte de una persona.
En el pasado ya se hicieron intentos de reducir el espacio de separación en desplazamientos rectos del vehículo articulado y de aumentarlo en curvas, para evitar un choque de las esquinas opuestas del espacio de carga del vehículo motorizado y del remolque. Un estado de la técnica genérica está descrito en el documento DE 33 33 231 A1 con una lanza de tracción ajustable mediante un cilindro receptor hidráulico, alimentándose el cilindro receptor desde un cilindro maestro dispuesto por debajo de la corona giratoria. En cuanto gire el eje delantero del remolque, el pistón del cilindro maestro se hace entrar o salir y mete líquido hidráulico a presión del cilindro maestro al cilindro receptor, que desplaza a su vez el ojete de tracción en la dirección axial de la lanza de tracción. El mayor inconveniente de esta lanza de tracción conocida está en que solo funciona en remolques con eje delantero dirigido y que no puede instalarse en remolques con lanza de tracción rígida. Otro inconveniente está en el control exclusivamente en función de ángulos de la lanza de tracción de longitud ajustable sin tener en cuenta la velocidad de marcha del vehículo articulado. Además, esta forma conocida de control forzado funciona por regla general bien mientras no cambien las relaciones geométricas de vehículo motorizado y remolque, es decir, mientras el remolque es tirado siempre por el mismo vehículo motorizado. Si el remolque es tirado, no obstante, por distintos vehículos motorizados, con un contorno diferente del espacio de carga o del chasis, existe un mayor riesgo de una colisión entre el remolque y el vehículo motorizado al girar lateralmente en una curva debido a un espacio de separación ajustado demasiado pequeño entre el vehículo motorizado y el remolque.
Una solución técnica similar de un llamado sistema de acoplamiento corto, que permite también la tracción de remolques con una lanza de tracción rígida, se propone en el documento DE 41 36 334 C1, alimentándose allí, no obstante, el cilindro receptor que se encuentra en el remolque desde un cilindro maestro dispuesto en el vehículo motorizado, que está sometido a su vez a un accionamiento forzoso mediante un engranaje mecánico en función del ángulo de acodamiento entre el vehículo motorizado y el remolque.
Por el documento DE 195 07 034 A1 se ha dado a conocer evitar en un camión con remolque daños en la barra ahorquillada de tracción o en montajes exteriores del vehículo motorizado durante la marcha atrás. Para ello debe estar previsto un acoplamiento de remolque con una boca de acoplamiento alojada de forma giratoria y elástica en la traviesa del chasis, que gira dentro de unos límites determinados con la barra ahorquillada de tracción cuando se gira el vehículo correspondientemente. Para detectar el movimiento de la boca de acoplamiento, a los dos lados de la abertura de la boca de acoplamiento están dispuestos sensores. Los sensores provocan una parada del motor poco antes de chocar la barra ahorquillada de tracción contra el chasis u otros montajes exteriores, de modo que el conductor del camión debe iniciar en primer lugar otras medidas para volver a poner su vehículo posteriormente en marcha. El seguro conocido de camión-barra ahorquillada de tracción solo funciona en maniobras lentas durante la marcha atrás y provoca una parada del motor al rebasarse una posición de acodamiento predeterminada entre el vehículo motorizado y el remolque. Esto es un riesgo grave para la seguridad en una marcha rápida en la autopista, por lo que no es aceptable.
El documento FR 2 692 202 A1 da a conocer un sistema que muestra el preámbulo de la reivindicación 1.
Por lo tanto, la invención tenía el objetivo de poner a disposición un sistema, con el que puede variarse en el servicio de marcha el espacio de separación entre el vehículo motorizado y el remolque de forma automatizada y en función de la velocidad, tanto en caso de remolques dirigidos como en el de remolques no dirigidos.
El objetivo se consigue según la invención con un sistema en el que la unidad de control es un aparato de control electrónico, que está conectado a un indicador de velocidad para el procesamiento de una señal de velocidad y que está conectado al actuador. El aparato de control recibe, por consiguiente, como magnitud de entrada un valor de medición de la velocidad actual y emite como magnitud de salida una señal correspondiente al actuador. A continuación, el actuador ajusta el espacio de separación entre el vehículo motorizado y el remolque en función de la velocidad de marcha. Para ello, en el aparato de control está depositada una curva característica, que representa un ajuste funcional constante del espacio de separación en función de la velocidad de marcha actual.
En principio, en el margen de velocidades bajas es ventajoso un espacio de separación grande, puesto que los inconvenientes aerodinámicos apenas influyen y el vehículo articulado va por regla general por un trayecto de muchas curvas, que requiere acodamientos grandes entre el vehículo motorizado y el remolque alrededor de un eje de giro vertical. Cuando se va, en cambio por una autopista, aumenta la velocidad de marcha y, por lo tanto, los efectos aerodinámicos de un espacio de separación grande. Los radios de curva a recorrer a alta velocidad son, por regla general, tan grandes que solo se producen movimientos relativos pequeños entre el vehículo motorizado y el remolque y que no ha de temerse un choque del remolque contra el chasis del vehículo motorizado.
Según una primera forma de realización preferible, el indicador de velocidad es un sensor de velocidad que coopera con la caja de cambios del vehículo. Esta forma de realización afecta a una modificación del vehículo motorizado y suministra al sistema según la invención una señal especialmente exacta y cercana en el tiempo, independientemente de su configuración electrónica restante.
De forma ventajosa, el indicador de velocidad también puede ser un sensor de velocidad que coopera con un eje de un remolque. Esta forma de realización tiene la ventaja de que todos los componentes del sistema están instalados en el remolque, que el remolque puede ser tirado por distintos vehículos motorizados, consiguiéndose a pesar de ello las ventajas según la invención. Como alternativa, el sensor de velocidad puede trabajar también como sensor de rueda o puede transformar de otro modo un movimiento giratorio por unidad de tiempo en una señal de velocidad.
Según otra forma de realización, el indicador de velocidad puede estar formado por el sistema antibloqueo de frenos (ABS) del remolque. El sistema ABS genera siempre una señal de velocidad, de modo que puede renunciarse a la colocación y conexión de otros sensores.
En función del equipamiento técnico del vehículo motorizado, también puede servir como indicador de velocidad... [Seguir leyendo]
Reivindicaciones:
1. Un sistema para el ajuste automático de un espacio de separación (1) entre un vehículo motorizado (2) y un remolque (3) acoplado al mismo, que comprende una lanza de tracción (4) de longitud ajustable con un tubo de 5 tracción (5) y un ojete de tracción (6) dispuesto en un extremo del mismo, pudiendo desplazarse el ojete de tracción (6) respecto al tubo de tracción (5) mediante un actuador (7) en el eje longitudinal del vehículo a lo largo de un recorrido de desplazamiento predeterminado, así como una unidad de control, siendo la unidad de control un aparato de control electrónico (8) , que está conectado a un indicador de velocidad (9) para el procesamiento de una señal de velocidad y que está conectado al actuador (7)
caracterizado por que en el aparato de control electrónico (8) está depositada una curva característica, que representa un ajuste funcional constante del espacio de separación (1) en función de la velocidad de marcha actual.
2. Sistema de acuerdo con la reivindicación 1, caracterizado por que el indicador de velocidad es un sensor de velocidad que coopera con la caja de cambios del vehículo. 15
3. Sistema de acuerdo con la reivindicación 1, caracterizado por que el indicador de velocidad (9) es un sensor de velocidad (11) que coopera con un eje (10) de un remolque (3) .
4. Sistema de acuerdo con la reivindicación 1, caracterizado por que el indicador de velocidad (9) está formado por 20 el sistema ABS (12) del remolque (3) o del vehículo motorizado (2) .
5. Sistema de acuerdo con la reivindicación 1, caracterizado por que el indicador de velocidad (9) está formado por el bus CAN (13) .
6. Sistema de acuerdo con una de las reivindicaciones 1 a 5, caracterizado por que el actuador (7) trabaja de forma hidráulica, electromecánica o neumática.
7. Sistema de acuerdo con una de las reivindicaciones 1 a 6, caracterizado por que el tubo de tracción (5) está realizado como primer tramo de tubo (15) y el ojete de tracción (6) comprende un segundo tramo de tubo (16) , 30 solapándose los dos tramos de tubo (15, 16) .
8. Sistema de acuerdo con la reivindicación 7, caracterizado por que el actuador (7) está dispuesto en el interior de uno o de los dos tramo (s) de tubo (15, 16) .
9. Sistema de acuerdo con las reivindicaciones 7 u 8, caracterizado por que el actuador (7) está accionado por un grupo (17) , estando dispuesto el grupo (17) en o en el interior de uno o de los dos tramo (s) de tubo (15, 16) .
10. Sistema de acuerdo con una de las reivindicaciones 7 a 9, caracterizado por que el aparato de control electrónico (8) está dispuesto en o en el interior de uno o de los dos tramo (s) de tubo (15, 16) . 40
11. Sistema de acuerdo con una de las reivindicaciones 1 a 10, caracterizado por que el aparato de control electrónico (8) está conectado al menos a otro emisor de señales (18) para el procesamiento de una señal del estado de marcha.
12. Sistema de acuerdo con la reivindicación 11, caracterizado por que el emisor de señales (18) es un sensor de distancia (19) , que capta un cambio de la distancia (x) entre el remolque (3) y un vehículo motorizado (2) que se encuentra delante del mismo.
13. Sistema de acuerdo con la reivindicación 11, caracterizado por que el emisor de señales (18) es un sensor 50 angular (22) .
14. Sistema de acuerdo con la reivindicación 12, caracterizado por que el sensor angular (22) puede disponerse en la zona de una corona giratoria (23) y detecta un cambio del ángulo de giro (1) de la misma.
15. Sistema de acuerdo con la reivindicación 13, caracterizado por que el sensor angular (22) es un sensor de dirección (24) , que puede disponerse en la zona de un volante (25) , un varillaje de dirección (26) o un mecanismo de dirección (27) y detecta un cambio del ángulo de dirección (2) del volante (25) , del varillaje de dirección (26) o de partes (28) del mecanismo de dirección (27) .
16. Sistema de acuerdo con la reivindicación 13, caracterizado por que el sensor angular (22) es un sensor de ángulos de dirección (29) , que puede disponerse en la zona de al menos una rueda delantera (30a) del vehículo motorizado (2) y que detecta un cambio del ángulo de dirección (3) de la misma.
Patentes similares o relacionadas:
Guía de cables para líneas de transición entre vagones, del 1 de Julio de 2020, de Siemens Mobility Austria GmbH: Vehículo ferroviario (A), que comprende al menos un extremo de vagón con una guía de cables para las líneas de transición entre vagones para […]
DISPOSITIVO DE CONEXIÓN DE LÍNEAS DE ALIMENTACIÓN, del 12 de Diciembre de 2019, de MAHUGO CRIADO, Juan Antonio: Dispositivo de conexión de líneas de alimentación, en particular de un vehículo y por lo menos un remolque, que comprende una primera unidad de control (CU1) está situada […]
Método de control de un convoy de vehículos a motor por carretera y un convoy de vehículos a motor por carretera, del 23 de Octubre de 2019, de COMMISSARIAT A L'ENERGIE ATOMIQUE ET AUX ENERGIES ALTERNATIVES: Un método para controlar un convoy de vehículos a motor por carretera , que comprende: - un primer vehículo a motor por carretera , ubicado […]
Procedimiento y dispositivo para el reconocimiento de un remolque, del 24 de Julio de 2019, de VOLKSWAGEN AKTIENGESELLSCHAFT: Procedimiento para el reconocimiento de un remolque que está enganchado en un vehículo , comprendiendo el procedimiento los siguientes pasos: […]
Disposición de conexión para un remolque y remolque, del 12 de Octubre de 2016, de WABCO GMBH: Disposición de conexión (1, 1', 1'') para un remolque que comprende las siguientes conexiones adecuadas para una conexión […]
Dispositivo de conexión para un remolque y remolque con dispositivo de conexión, del 17 de Agosto de 2016, de WABCO GMBH: Remolque con un dispositivo de conexión , presentando el dispositivo de conexión al menos: un primer elemento de conexión […]
Unidad portante, del 3 de Agosto de 2016, de Scambia Holdings Cyprus Limited: Unidad portante para automóviles que comprende una estructura portante que se puede montar en una zona trasera del automóvil y una unidad sensora (S1, S2) […]
 SALIDA DE CONDUCTOS PARA UN SEMI-REMOLQUE DE UN TREN SEMI-REMOLQUE, del 18 de Mayo de 2010, de JOST-WERKE GMBH.: Salida de conductos para un semi-remolque de un tren semi-remolque comprendiendo una estructura de bastidor con una placa de semi-remolque […]
SALIDA DE CONDUCTOS PARA UN SEMI-REMOLQUE DE UN TREN SEMI-REMOLQUE, del 18 de Mayo de 2010, de JOST-WERKE GMBH.: Salida de conductos para un semi-remolque de un tren semi-remolque comprendiendo una estructura de bastidor con una placa de semi-remolque […]