Acoplamiento de engranaje.
Un acoplamiento de engranajes que comprende:
un piñón (5) provisto de dientes de engranaje externos (5a),
y fijado a un primer árbol rotativo (3);
un manguito (9) provisto de dientes de engranaje internos (9a) para engranar con los dientes de engranajeinternos (5a) del piñón (5), teniendo el manguito (9) una abertura (9b) en una cara extrema en cada uno delos lados del manguito (9), a través de una cualquiera de las cuales se introduce el piñón (5) en el interior delmanguito, y que es acoplado a un segundo árbol rotativo (4);
un primer miembro extremo (8) para cerrar la abertura existente en una de las caras extremas del manguito(9) a través de la cual pasa el primer árbol rotativo (3), para formar un espacio (8a) del árbol rotativo a travésdel cual pasa el primer árbol rotativo (3); y
un segundo miembro extremo (11) para cerrar la otra abertura (9b) existente en la otra cara extrema delmanguito (9); en el que el manguito (9), el primer miembro extremo (8) y el segundo miembro extremo (11)están configurados para formar un espacio para retener lubricante (10),
estando caracterizado el acoplamiento de engranajes porque el piñón (5) tiene una parte que aumenta dediámetro en dirección hacia fuera a lo largo del eje del árbol rotativo para formar una superficie (5c) enestrechamiento vuelta hacia la superficie circunferencial interna (8c) del primer miembro extremo (8), en elque la superficie (5c) en estrechamiento está provista de ranuras (5d) orientadas circunferencialmente,formadas en ella de tal manera que ambas caras laterales de cada ranura (5d) están inclinadas desde laabertura de la misma, en dirección hacia dentro a lo largo del eje del árbol rotativo (3, 4) de manera que elfondo de cada ranura (5d) está en una posición axialmente hacia dentro en comparación con la abertura decada ranura (5d).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/JP2005/002455.
Solicitante: MITSUBISHI ELECTRIC CORPORATION.
Nacionalidad solicitante: Japón.
Dirección: 7-3, MARUNOUCHI 2-CHOME CHIYODA-KU TOKYO 100-8310 JAPON.
Inventor/es: SHIGEURA, JUNICHI, TERASAWA,HIDEO, AKAGI,HIDENARI.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- F16D3/18 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F16 ELEMENTOS O CONJUNTOS DE TECNOLOGIA; MEDIDAS GENERALES PARA ASEGURAR EL BUEN FUNCIONAMIENTO DE LAS MAQUINAS O INSTALACIONES; AISLAMIENTO TERMICO EN GENERAL. › F16D ACOPLAMIENTOS PARA LA TRANSMISION DE MOVIMIENTOS DE ROTACION (transmisión para transmitir la rotación F16H, p. ej. transmisiones por fluidos F16H 39/00 - F16H 47/00 ); EMBRAGUES (embragues dinamo-eléctricos H02K 49/00; embragues que utilizan atracción electrostática H02N 13/00 ); FRENOS (sistemas de frenado electrodinámicos para vehículos, en general B60L 7/00; frenos dinamoeléctricos H02K 49/00). › F16D 3/00 Acoplamientos extensibles, es decir, con medios que permiten el movimiento entre partes acopladas durante su accionamiento (acoplamientos desmontables por movimiento axial simplemente F16D 1/10; acoplamientos de deslizamiento F16D 7/00; acoplamientos mediante fluidos F16D 31/00 - F16D 39/00). › las piezas de acoplamiento tienen dientes que engranan por deslizamiento.
PDF original: ES-2398467_T3.pdf
Fragmento de la descripción:
Acoplamiento de engranaje.
Campo Técnico La presente invención se refiere a acoplamientos de engranajes para utilizar en la transmisión de fuerza de accionamiento rotativa.
Antecedentes Técnicos En un acoplamiento convencional de engranajes que tienen un piñón con dientes de engranaje externos y un manguito con dientes de engranaje internos, ha sido utilizado un manguito que tiene aberturas en ambos extremos. La abertura de un extremo del mismo está cerrada con una cubierta extrema que tiene un orificio a través del cual pasa un árbol rotativo, y la abertura del otro extremo está cerrada con un miembro. Al menos una cualquiera de las aberturas es tan grande que el piñón puede ser introducido en el manguito. Un mecanismo de prevención de fugas de lubricante está dispuesto en la parte de unión o junta entre el manguito y el miembro que cierra la abertura. (Se hace referencia, por ejemplo al Documento 1 de Patente) .
El piñón si fija normalmente al árbol rotativo por medio de un procedimiento de ajustes por contracción. Puesto que el ajuste por contracción no puede ser realizado con el piñón situado dentro del manguito, el acoplamiento de engranajes de ensambla mediante los siguientes pasos: en primer lugar, se fija el piñón al árbol rotativo por medio del ajuste por contracción en un estado en el que el árbol rotativo ha pasado a través del espacio del árbol rotativo de la cubierta extrema; en segundo lugar, se introduce el piñón en el manguito que se ha de acoplar con el engranaje interno del manguito; a continuación, la cubierta extrema se une al manguito; y, finalmente, se cierra la otra abertura extrema del manguito.
Documento 1 de Patente: Patente Japonesa Abierta No. 7-286622.
En un acoplamiento convencional de engranajes que tiene el piñón con los dientes de engranaje externos y el manguito con los dientes de engranaje internos, puesto que el manguito tiene la abertura en ambos extremos del mismo y está provisto del mecanismo de prevención de fugas de lubricante en la junta entre el manguito y el miembro que cierra la abertura, ha existido el problema de que:
(1) la dificultad en el ajuste del mecanismo que evita la fuga del lubricante, que está dispuesto en la junta entre el manguito y el miembro que cierra la abertura, puede originar algunas veces la fuga de lubricante. Además, puesto que el orificio a través del cual pasa el árbol rotativo, está formado en la cubierta extrema, ha existido otro problema en el que:
(2) substancias (a las que se denomina “substancias deteriorantes”) tales como agua o polvo, que deterioran el lubricante, es probable que penetren en al acoplamiento de engranajes, haciendo que el lubricante se deteriore más rápidamente. Se hace observar que las substancias deteriorantes pueden estar en cualquier estado, sólido, líquido o gaseoso.
La Patente US 5.679.076, publicada el 21 de octubre de 1997, y el documento EP 0676555, describen un acoplamiento de engranajes flexible de acuerdo con el preámbulo de la reivindicación 1.
SUMARIO DE LA INVENCION La presente invención se refiere a acoplamientos de engranajes flexibles y pueden estar caracterizados de acuerdo con la reivindicación independiente 1. La presente invención puede estar caracterizada además de acuerdo con las reivindicaciones dependientes.
Breve descripción de los Dibujos La figura 1 es una vista parcialmente en sección, que ilustra la configuración general de un primer ejemplo de acoplamiento de engranajes; La figura 2 es una vista ampliada que ilustra el lado del motor de accionamiento eléctrico del acoplamiento de engranajes de acuerdo con el primer ejemplo de acoplamiento de engranajes; La figura 3 es una vista para explicar espacios divididos dentro y fuera del acoplamiento de engranajes; La figura 4 es una visa para explicar un concepto para clasificar medidas para evitar que las sustancias deteriorantes penetren dentro del acoplamiento de engranajes; La figura 5 es una vista para explicar las fuerzas que actúan sobre las substancias deteriorantes que están presentes en la superficie de una ranura formada a lo largo del perímetro exterior de un espacio del árbol rotativo de un manguito del acoplamiento de engranajes; La figura 6 es una vista para explicar las fuerzas que actúan sobre las substancias deteriorantes que están presentes en la superficie circunferencial interior del espacio del árbol rotativo del manguito del acoplamiento de engranajes; La figura 7 es una vista para explicar las fuerzas que actúan sobre substancias deteriorantes que están presentes en superficies de ranuras formadas en un piñón del acoplamiento de engranajes;
La figura 8 es una vista ampliada que ilustra el lado del motor de accionamiento 96++eléctrico de un acoplamiento de engranajes de acuerdo con una realización de la presente invención; y La figura 9 es una vista parcialmente en sección que ilustra la configuración general de otro ejemplo de acoplamiento de engranajes.
Números de Referencia 1: motor de accionamiento eléctrico,
2: dispositivo de engranajes de reducción,
3: árbol rotativo de accionamiento (primer árbol rotativo) ,
4: árbol rotativo accionado (segundo árbol rotativo) , 4a: placa de acoplamiento,
5: piñón, 5a: dientes de engranaje externos, 5b: rebaje, 5c: superficie periférica exterior, 5d: ranura,
6: tuerca de extremo del árbol,
7: unidad de acoplamiento, 7a: miembro de manguito, 7b: tornillos, 7c: tuercas,
8: cubierta extrema (primer miembro extremo) , 8a: espacio de árbol rotativo, 8b: ranura, 8c: superficie circunferencia interior, 8d: parte cilíndrica, 8e: tornillos, 8f: tuercas,
9: manguito, 9a: dientes de engranaje internos, 9b: orificio (abertura) de introducción de piñón, 9c: tornillos, 9d: tuercas,
10: grasa (lubricante) ,
11: placa central (segundo miembro extremo) ,
12: cojín,
13: anillo tórico,
14: anillo tórico,
A: Espacio Exterior,
B: Espacio de Interconexión, y
C: Espacio Interior
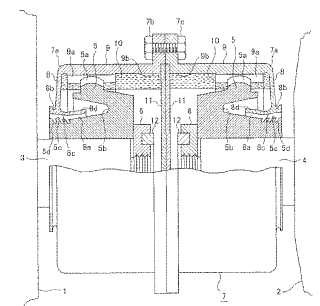
Mejor modo de realizar la Invención La figura 1 es una vista parcialmente en sección, que ilustra la configuración general de un ejemplo de acoplamiento de engranajes. El acoplamiento de engranajes interconecta un motor de accionamiento eléctrico 1 y un dispositivo 2 de engranajes de reducción para utilizar en vagones de ferrocarril. Para concretar más, el acoplamiento de engranajes interconecta un árbol rotativo 3 de accionamiento, accionado a su vez por el motor de accionamiento eléctrico 1, con un árbol rotativo accionado 4 para impulsar el dispositivo 2 de engranajes de reducción. El acoplamiento de engranajes es aproximadamente simétrico a izquierda y derecha. La figura 2 muestra una vista ampliada que ilustra el lado del motor de accionamiento eléctrico 1 del acoplamiento de engranajes, el cual está en el lado izquierdo de la figura 1. A continuación, se puede hacer referencia al árbol rotativo 3 de accionamiento y al árbol rotativo 4 accionado como “árbol rotativo”, para abreviar.
Dirigiendo la explicación al lado del motor de accionamiento eléctrico 1, el árbol rotativo de accionamiento 3 y el árbol rotativo accionado 4 se definen como el primer árbol rotativo y el segundo árbol rotativo, respectivamente. Incidentalmente, mirando desde el dispositivo 2 de engranajes de reducción, el árbol rotativo accionado 4 es el primer árbol rotativo y el árbol rotativo de accionamiento 3, es el segundo, respectivamente.
Dos piñones 5 están fijados al árbol rotativo de accionamiento 3 y al árbol rotativo accionado 4, respectivamente, cada uno de ellos con una tuerca extrema 6 de árbol. Dientes de engranaje internos 5a de corona están formados en la circunferencia exterior del piñón 5. Los dos piñones 5 son de los mismos tamaños y formas entre sí, y los dientes de engranaje externos 5a de los dos tienen también la misma forma entre sí. El árbol rotativo de accionamiento 3 y el árbol rotativo accionado 4 están introducidos dentro de la unidad de acoplamiento 7.
Aquí, la formación de corona es una clase de mecanización para hacer el diente de engranaje ligeramente convexo
a lo largo de la traza del diente. El objeto de la formación de corona de los dientes de engranaje internos 5a es hacerlos trabajar como el acoplamiento de engranajes incluso en casos en los que el árbol rotativo de accionamiento 3 y el árbol rotativo accionado 4 quedan fuera de alineación mutua en posición y/o dirección axial. El acoplamiento de engranajes que puede transmitir potencia motriz incluso con tal desalineación de los árboles rotativos en posición y dirección axial, se denomina usualmente acoplamiento... [Seguir leyendo]
Reivindicaciones:
1. Un acoplamiento de engranajes que comprende:
un piñón (5) provisto de dientes de engranaje externos (5a) , y fijado a un primer árbol rotativo (3) ; un manguito (9) provisto de dientes de engranaje internos (9a) para engranar con los dientes de engranaje internos (5a) del piñón (5) , teniendo el manguito (9) una abertura (9b) en una cara extrema en cada uno de los lados del manguito (9) , a través de una cualquiera de las cuales se introduce el piñón (5) en el interior del manguito, y que es acoplado a un segundo árbol rotativo (4) ;
un primer miembro extremo (8) para cerrar la abertura existente en una de las caras extremas del manguito (9) a través de la cual pasa el primer árbol rotativo (3) , para formar un espacio (8a) del árbol rotativo a través del cual pasa el primer árbol rotativo (3) ; y un segundo miembro extremo (11) para cerrar la otra abertura (9b) existente en la otra cara extrema del manguito (9) ; en el que el manguito (9) , el primer miembro extremo (8) y el segundo miembro extremo (11)
están configurados para formar un espacio para retener lubricante (10) , estando caracterizado el acoplamiento de engranajes porque el piñón (5) tiene una parte que aumenta de diámetro en dirección hacia fuera a lo largo del eje del árbol rotativo para formar una superficie (5c) en estrechamiento vuelta hacia la superficie circunferencial interna (8c) del primer miembro extremo (8) , en el que la superficie (5c) en estrechamiento está provista de ranuras (5d) orientadas circunferencialmente,
formadas en ella de tal manera que ambas caras laterales de cada ranura (5d) están inclinadas desde la abertura de la misma, en dirección hacia dentro a lo largo del eje del árbol rotativo (3, 4) de manera que el fondo de cada ranura (5d) está en una posición axialmente hacia dentro en comparación con la abertura de cada ranura (5d) .
Patentes similares o relacionadas:
Máquina eléctrica refrigerada por aire, del 3 de Junio de 2020, de Traktionssysteme Austria GmbH: Máquina eléctrica refrigerada por aire con una carcasa , un rotor conectado seguro frente al giro a un árbol de rotor , un estátor con unos canales […]
Junta y conjunto de botón y aparato que tiene una junta y un conjunto de botón, del 1 de Enero de 2020, de LG ELECTRONICS INC.: Una junta , que comprende: un alojamiento formado en una forma cilíndrica que tiene una longitud predeterminada y que tiene un espacio interior […]
Conjunto de botón y aparato con el conjunto de botón, del 1 de Enero de 2020, de LG ELECTRONICS INC.: Un conjunto de botón, que comprende: un botón configurado para ser instalado de forma giratoria; un anillo del botón configurado […]
Acoplamiento dentado, del 4 de Diciembre de 2019, de Flender GmbH: Acoplamiento dentado para unir un árbol de accionamiento y un árbol de salida, que comprende - una primera sección de acoplamiento […]
Componente de cubo para una unión de árbol y cubo, unión de árbol y cubo, así como procedimiento para la fabricación de un componente de cubo, del 16 de Octubre de 2019, de Leistritz Extrusionstechnik GmbH: Componente de cubo para una unión de árbol y cubo que comprende un dentado interior configurado en una perforación y que se extiende axialmente desde un […]
Sistema de transmisión de potencia para una turbina eólica, del 2 de Noviembre de 2016, de Romax Technology Limited: Sistema de transmisión de potencia para aumentar la velocidad rotacional de un rotor de una turbina eólica, que comprende: un árbol […]
Engranaje planetario para una central eólica y procedimiento, del 20 de Abril de 2016, de Flender GmbH: Engranaje planetario para una central eólica, que comprende - una etapa planetaria periférica en una caja del engranaje en el lado del accionamiento, - una etapa […]
 Acomplamiento con anillo de acoplamiento sobre dos elementos de acoplamiento y anillo de acoplamiento correspondiente, del 13 de Enero de 2016, de KWD KUPPLUNGSWERK DRESDEN GMBH: Acoplamiento con anillo de acoplamiento sobre dos elementos de acoplamiento , donde las partes de acoplamiento presentan respectivamente una […]
Acomplamiento con anillo de acoplamiento sobre dos elementos de acoplamiento y anillo de acoplamiento correspondiente, del 13 de Enero de 2016, de KWD KUPPLUNGSWERK DRESDEN GMBH: Acoplamiento con anillo de acoplamiento sobre dos elementos de acoplamiento , donde las partes de acoplamiento presentan respectivamente una […]