ACCIONAMIENTO LINEAR PARA UN ROBOT INDUSTRIAL O UNA MAQUINA HERRAMIENTA.
Eje linear (5) para un robot industrial o para una máquina-herramienta,
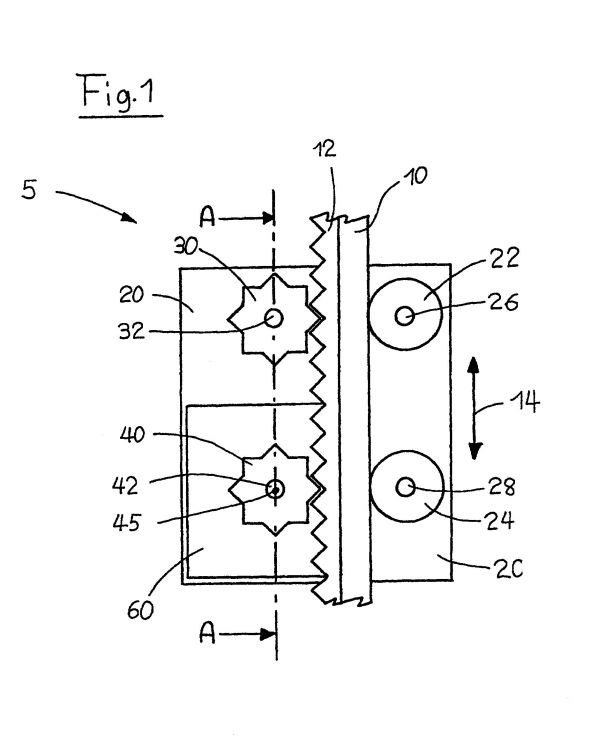
con una exactitud de movimiento y de posicionamiento más pequeña de 1 mm; con un raíl de guía (10), que define una dirección longitudinal; con un elemento de desplazamiento (20), que puede ser desplazado a lo largo del raíl de guía (10); con un mecanismo de accionamiento (12, 30) para, a discreción, poder desplazar y posicionar el elemento de desplazamiento (20) a lo largo del raíl de guía (10); así como con un dispositivo de retención de seguridad (12, 40, 50, 51, 52, 53), que está previsto para la retención del elemento de desplazamiento (20) en relación con el raíl de guía (10), y esto con independencia del estado de funcionamiento del mecanismo de accionamiento (12, 30); en este caso, el dispositivo de retención de seguridad (12, 40, 50, 51, 52, 53) comprende una cremallera (12), que de manera fija está dispuesta - en el sentido longitudinal del raíl de guía (10) - en una primera parte de una pareja de partes componentes, que está constituida por el raíl de guía (10) y por el elemento de desplazamiento (20); comprende una rueda dentada (40) que - en una forma de disposición, en la que la misma se encuentra en engrane con la cremallera (12) - está dispuesta de manera giratoria por un eje de giro (45) que es estacionario con respecto a la otra, es decir, a la segunda parte de la pareja de partes componentes; como asimismo comprende este dispositivo de retención un dispositivo de freno (50, 51, 52, 53), que está previsto para frenar la rueda dentada (40); comprendiendo el eje linear (5) otros medios adicionales para la generación de una señal de accionamiento, que indica el estado de funcionamiento del mecanismo de accionamiento (12, 30), así como unos medios de control de frenado para controlar el dispositivo de freno (50, 51, 52, 53); en este caso, los medios de control de frenado están realizados de tal manera, que los mismos puedan - en función de la señal de accionamiento - efectuar el accionamiento del dispositivo de freno (50, 51, 52, 53); eje linear éste que está caracterizado porque los medios de control de frenado controlan el dispositivo de freno (50, 51, 52, 53) de tal modo, que el dispositivo de freno (50, 51, 52, 53) sea siempre accionado al indicar la señal de accionamiento que el mecanismo de accionamiento(12, 30) no está impulsando el elemento de desplazamiento (20).
Tipo: Resumen de patente/invención.
Solicitante: GUDEL AG ANTRIEBS- UND LINEARTECHNIK.
Nacionalidad solicitante: Suiza.
Dirección: INDUSTRIE NORD,4900 LANGENTHAL.
Inventor/es: GUDEL,RUDOLF, ZULAUF,WALTER.
Fecha de Publicación: .
Fecha Solicitud PCT: 16 de Abril de 2003.
Fecha Concesión Europea: 25 de Junio de 2008.
Clasificación PCT:
- B23Q1/28 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B23 MAQUINAS-HERRAMIENTAS; TRABAJO DE METALES NO PREVISTO EN OTRO LUGAR. › B23Q PARTES CONSTITUTIVAS, DISPOSITIVOS O ACCESORIOS DE MAQUINAS HERRAMIENTAS, p. ej. DISPOSITIVOS PARA COPIAR O CONTROLAR (herramientas del tipo utilizado en tornos o máquinas de agujerear B23B 27/00 ); MAQUINAS HERRAMIENTAS DE UTILIZACION GENERAL, CARACTERIZADAS POR LA ESTRUCTURA DE CIERTAS PARTES CONSTITUTIVAS O DISPOSITIVOS; COMBINACIONES O ASOCIACIONES DE MAQUINAS PARA TRABAJAR EL METAL NO DESTINADAS A UN TRABAJO EN PARTICULAR. › B23Q 1/00 Elementos componentes de la estructura general de un tipo de máquina, y más especialmente los elementos fijos más grandes (B23Q 37/00 tiene prioridad). › Medios para fijar los elementos deslizantes en la posición deseada.
- B23Q5/58 B23Q […] › B23Q 5/00 Mecanismos de propulsión o de avance; Disposición de los mecanismos de control a este efecto (control automático B23Q 15/00; copiado B23Q 33/00, B23Q 35/00; especialmente adaptados a las máquinas de escariar o de taladrar B23B 39/10, B23B 47/02). › Dispositivos de seguridad.
- B25J19/00 B […] › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › Accesorios adaptados a los manipuladores, p. ej. para controlar, para observar; Dispositivos de seguridad combinados con los manipuladores o especialmente concebidos para ser utilizados en asociación con estos manipuladores (dispositivos de seguridad en general F16P; protección contra las radiaciones en general G21F).
- B25J19/06 B25J […] › B25J 19/00 Accesorios adaptados a los manipuladores, p. ej. para controlar, para observar; Dispositivos de seguridad combinados con los manipuladores o especialmente concebidos para ser utilizados en asociación con estos manipuladores (dispositivos de seguridad en general F16P; protección contra las radiaciones en general G21F). › Dispositivos de seguridad.
- B25J5/02 B25J […] › B25J 5/00 Manipuladores montados sobre ruedas o sobre soportes móviles (B25J 1/00 tiene prioridad; manipuladores de control programado B25J 9/00). › que se desplazan sobre un camino-guía.
- F16D63/00 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F16 ELEMENTOS O CONJUNTOS DE TECNOLOGIA; MEDIDAS GENERALES PARA ASEGURAR EL BUEN FUNCIONAMIENTO DE LAS MAQUINAS O INSTALACIONES; AISLAMIENTO TERMICO EN GENERAL. › F16D ACOPLAMIENTOS PARA LA TRANSMISION DE MOVIMIENTOS DE ROTACION (transmisión para transmitir la rotación F16H, p. ej. transmisiones por fluidos F16H 39/00 - F16H 47/00 ); EMBRAGUES (embragues dinamo-eléctricos H02K 49/00; embragues que utilizan atracción electrostática H02N 13/00 ); FRENOS (sistemas de frenado electrodinámicos para vehículos, en general B60L 7/00; frenos dinamoeléctricos H02K 49/00). › Frenos no previstos en otro lugar; Frenos que combinan varios de los tipos mencionados en los grupos F16D 49/00 - F16D 61/00 (frenos con órgano auxiliar para el autoapriete F16D 49/22, F16D 51/66, F16D 55/50).
- F16H19/00 F16 […] › F16H TRANSMISIONES. › Transmisiones que implican esencial y únicamente engranajes u órganos de fricción y que no pueden transmitir un movimiento rotativo indefinido (con órganos de accionamiento intermitente F16H 27/00 - F16H 31/00).
- F16H19/04 F16H […] › F16H 19/00 Transmisiones que implican esencial y únicamente engranajes u órganos de fricción y que no pueden transmitir un movimiento rotativo indefinido (con órganos de accionamiento intermitente F16H 27/00 - F16H 31/00). › implicando una cremallera y piñón.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Patentes similares o relacionadas:
Aparatos y procedimientos para el accionamiento remoto de puntos de control, del 24 de Junio de 2020, de Stevenson, Robert L: Aparato para el accionamiento remoto de un punto de control , que comprende: un elemento alargado que tiene un primer extremo y un […]
Funda protectora de robot con una conexión rebordeada, del 10 de Junio de 2020, de Dürr Systems AG: Funda protectora de robot para un robot de revestimiento , en particular un robot de pintura , con a) un elemento de conexión […]
Adaptador de enchufe, instrumento de ajuste y robot asociado, del 22 de Abril de 2020, de KUKA Deutschland GmbH: Adaptador de enchufe, que presenta: - una rosca , que está configurada para atornillar el adaptador de enchufe a un instrumento de ajuste , - un dispositivo […]
Aparato y sistema de brazo articulado, del 8 de Abril de 2020, de VANRX Pharmasystems Inc: Aparato de brazo articulado multieje sellado herméticamente para su uso dentro de una cámara aisladora sellable, comprendiendo el aparato: […]
Sistema de traslación, del 8 de Abril de 2020, de SW Automation GmbH: Sistema de traslación para un dispositivo de manejo que cuente al menos con un elemento de guía y al menos con un cuerpo de carro que dicho […]
Pasador de cizallamiento para calibración de robots, del 1 de Abril de 2020, de ABB SCHWEIZ AG: Un pasador de cizallamiento para calibrar un robot industrial y configurado de modo que se monte en un soporte del pasador de calibración en el robot […]
Procedimiento para monitorizar una línea de suministro de un robot industrial y un dispositivo de control, del 25 de Marzo de 2020, de KUKA Deutschland GmbH: Procedimiento para monitorizar una línea de suministro de un robot industrial , que tiene una o más líneas guiadas en un conducto protector , para detectar […]
Sistema de carga eléctrica para un robot, del 18 de Marzo de 2020, de Locus Robotics Corp: Un sistema de carga eléctrica, que comprende: un conjunto de cargador eléctrico, incluyendo: una base del cargador a acoplarse a una fuente de energía eléctrica; […]