ACCIONADOR PARA SISTEMAS DE GUIADO DE EQUIPOS ESPACIALES CON COEFICIENTE DE ROTACION VARIABLE.
Accionador para dispositivo de posicionamiento en rotación de un elemento móvil para equipo espacial que comprende una pieza (1) apta para ser sujetada a la parte fija de dicho equipo,
un rodamiento del tipo de bolas o de rodillos, una palanca (6) destinada para accionar la parte móvil de dicho equipo y montada sobre un árbol de salida (2) soportado por un primer anillo de dicho rodamiento, comprendiendo el mencionado accionador un medio de entrada (10) móvil mecánicamente y siendo susceptible de transformar un movimiento del medio de entrada en un movimiento de rotación del árbol de salida (2) alrededor del eje de dicho rodamiento, estando el segundo anillo (3) de dicho rodamiento unido en rotación con la pieza (1), caracterizado porque un tope regulable (5) va sujetado al indicado segundo anillo (3) coopera con la palanca (6) de forma que limite angularmente la rotación relativa de los dos anillos de dicho rodamiento, y porque brazos flexibles (4) que unen el segundo anillo de dicho rodamiento y la pieza limitan el coeficiente de rotación del árbol de salida (2) en respuesta a un desplazamiento del medio de entrada (10) cuando la palanca (6) se apoya sobre el tope regulable (5)
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E07111795.
Solicitante: THALES.
Nacionalidad solicitante: Francia.
Dirección: 45, RUE DE VILLIERS,92200 NEUILLY SUR SEINE.
Inventor/es: BAUDASSE,YANNICK, BROSSIER,JEROME, JEANDOT,XAVIER.
Fecha de Publicación: .
Fecha Solicitud PCT: 5 de Julio de 2007.
Fecha Concesión Europea: 18 de Noviembre de 2009.
Clasificación Internacional de Patentes:
- B64G1/22D
Clasificación PCT:
- B64G1/22 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B64 AERONAVES; AVIACION; ASTRONAUTICA. › B64G ASTRONAUTICA; VEHICULOS O EQUIPOS A ESTE EFECTO (aparatos o métodos para obtener materiales de fuentes extraterrestres E21C 51/00). › B64G 1/00 Vehículos espaciales. › Partes de vehículos espaciales o equipos especialmente adaptados para ser instalados en, o acoplados a, vehículos espaciales.
- B64G1/66 B64G 1/00 […] › Disposiciones o adaptaciones de aparatos o instrumentos no previstas en otro lugar (instrumentos en sí , ver las clases apropiadas, p. ej. antenas utilizadas en satélites H01Q 1/28).
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
Accionador para sistemas de guiado de equipos espaciales con coeficiente de rotación variable.
El ámbito de la presente invención es el de los componentes de guiado para los equipos utilizados en las aplicaciones espaciales, tales como por ejemplo la fabricación de satélites, y en particular la de dispositivos de direccionado en rotación para apéndices espaciales.
En las aplicaciones espaciales es necesario poder orientar ciertos elementos de un satélite o de un vehículo espacial, tales como una antena, un mástil, etc., en una dirección predeterminada con el fin, por ejemplo de dirigirlos hacia una estrella fija, mantener un direccionado hacia un punto en la superficie de la tierra, o bien también barrer una zona particular en la superficie de la tierra o de un astro cualquiera. Estos posicionamientos deben ser frecuentemente corregidos para compensar inevitables derivas en el mantenimiento de esta dirección y estas múltiples correcciones llevan consigo la realización de un número importante de ciclos de micro-rotación para estos apéndices espaciales y para sus dispositivos de guiado.
Habida cuenta del carácter irreversible de la puesta en órbita de un satélite, es necesario prever en la concepción del ingenio espacial, una duración, medida en número de ciclos, muy importante para estos equipos, de forma que garantice su capacidad de resistir a estas numerosísimas solicitaciones.
Esta fase denominada de direccionado fino da lugar generalmente a una fase de despliegue, en el transcurso de la cual los apéndices espaciales son sacados del acondicionamiento que ha sido definido para el lanzamiento y se posicionan para asegurar su función. Incluso si en algunos casos se puede tener la necesidad de recurrir a despliegues múltiples, estos permanecen en número muy limitado (como máximo algunas decenas, incluso una centena) y no necesitan que los dispositivos de direccionado sean dimensionados para el despliegue de forma tan engorrosa para movimientos de direccionado fino.
Como estos equipos deben funcionar en el vacío espacial, se tropieza con un problema particular relacionado con la dificultad de asegurar una buena lubricación de las partes en contacto en estas rotaciones.
Las realizaciones anteriores, tal como se ha descrito particularmente en el documento FR 2.703.415, han tenido que elegir, para estos movimientos en rotación, entre sistemas a base de rodamientos, cojinetes, rótulas, o carril de bolas, etc., capaces de asegurar desplazamientos angulares de gran amplitud, y sistemas a base de componentes flexibles, sin contacto entre las piezas giratorias, pero que solo permiten desplazamientos angulares limitados.
Un dispositivo de posicionamiento ha sido sin embargo puesto a punto, que es capaz, con una misma motorización, de realizar movimientos angulares de gran amplitud con relativamente corta duración para una fase denominada de despliegue y de movimientos de poca amplitud con una duración muy grande para una fase denominada de direccionado fino.
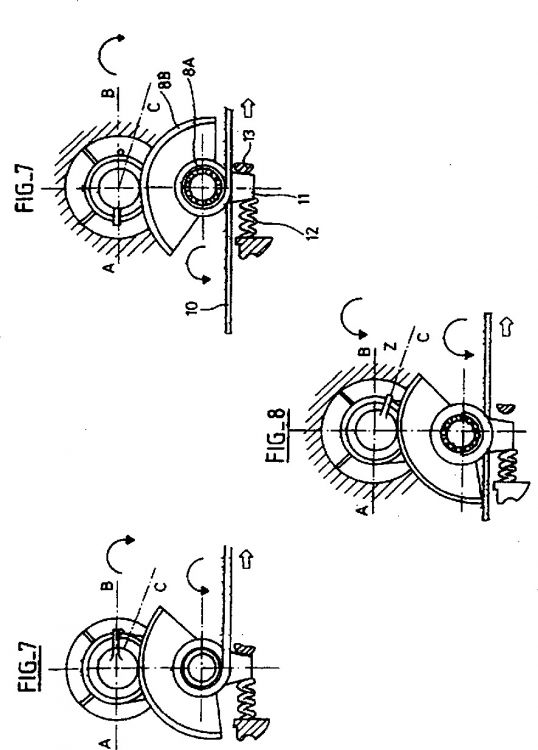
Un dispositivo de este tipo se realiza, como se ha indicado en la figura 1, por un conjunto constituido por una pieza sujetada con la parte fija de un equipo espacial, unida a uno de los anillos de un rodamiento de bolas o de rodillos a través de una unión elástica en rotación alrededor del eje de rodamiento y por una palanca destinada para accionar la parte móvil del equipo, unida de forma rígida al otro anillo del rodamiento. Un tope va fijado a uno de los anillos del rodamiento para apoyarse contra un elemento sujetado de forma rígida al otro anillo, con el fin de limitar angularmente la rotación relativa de los dos anillos. El posicionamiento de este tope es regulable en rotación sobre su anillo soporte lo cual permite desplazar a voluntad la zona sobre la cual se realizará el direccionado fino. El despliegue se realiza accionando el rodamiento en rotación y el direccionado fino se realiza por deformación de la unión elástica, sin consumo de los ciclos de vida del rodamiento.
Ahora es conveniente arrastrar este dispositivo en rotación para asegurar las funciones de despliegue y de direccionado fino. El dispositivo de arrastre en cuestión debe poder desplegar un objeto, rápidamente en una gran amplitud (típicamente 180º) luego direccionarlo con precisión (típicamente algunas milésimas de grados en un margen de aproximadamente 6º). Para ello deben transformar un movimiento lineal continuo, de poca amplitud, producido generalmente por un accionador lineal, en un movimiento rotativo sin holgura, con fuerte capacidad de du-ración.
Los dispositivos de arrastre generalmente utilizados en el ámbito de los satélites están constituidos bien sea por moto-reductores a base de un motor paso a paso asociado con un reductor del tipo Harmonic Drive
ya sea por mecanismos compuestos por un motor paso a paso, por un engranaje y por un reductor de bandas.
Estos dispositivos no son satisfactorios por las razones siguientes: bien sea porque tienen una holgura interna que es incompatible con las precisiones o tiempos de duración requeridos (por ejemplo: engranaje), bien porque proponen un coeficiente de rotación satisfactorio para el direccionado, pero a costas de un tiempo de despliegue muy penalizador, o bien porque no proporcionar la precisión suficiente y necesitan entonces un sistema complementario de reducción del coeficiente de rotación en el direccionado (como por ejemplo una polea de radio evolutivo asociada con una correa) pero que resulta voluminosa y necesita recorridos lineales importantes.
La presente invención tiene por objeto remediar estos inconvenientes proponiendo un accionador capaz de arrastrar en rotación un dispositivo de posicionamiento del tipo del representado en la figura 1, y asegurar un posicionamiento en direccionado extremadamente preciso. Este accionador es capaz de generar, a partir de un recorrido lineal de entrada reducida, movimientos angulares de gran amplitud para la fase de despliegue y movimientos de poca amplitud para la fase de direccionado fino.
A este respecto, la invención tiene por objeto un accionador para dispositivo de posicionamiento en rotación de un elemento móvil para equipamiento espacial que comprende una pieza sujetada a la parte fija de dicho equipo, un rodamiento del tipo de bolas o de rodillos, una palanca destinada para accionar la parte móvil de dicho equipo y montada sobre un árbol de salida soportado por un primer anillo de dicho rodamiento, comprendiendo el indicado accionador un medio de entrada móvil mecánicamente y siendo susceptible de transformar un movimiento del medio de entrada en un movimiento de rotación del árbol de salida alrededor del eje de dicho rodamiento, caracterizado porque el segundo anillo de dicho rodamiento está unido en rotación con la pieza de dicho equipo, porque un tope regulable va fijado al indicado anillo y coopera con la mango con el fin de limitar angularmente la rotación relativa de los dos anillo de dicho rodamiento, y porque el coeficiente de rotación del árbol de salida en respuesta a un desplazamiento del medio de entrada es diferente según la palanca esté, o no, apoyada sobre el tope regulable.
Se puede así pasar de una rotación de gran amplitud cuando la palanca no se encuentra sobre el tope regulable a un movimiento de poca amplitud para un mismo desplazamiento lineal cuando la palanca se encuentra sobre el tope regulable. Se beneficia así del efecto de reducción que genera un pilotaje cómodo en fase de direccionado fino.
De forma preferencial el medio de entrada es una correa que circula alrededor de una polea de reenvío soportada por una platina montada en extensión radial sobre el segundo anillo.
Ventajosamente, el extremo libre de la platina es hecha retroceder por un medio elástico contra un tope fijo con relación a la estructura del equipo espacial.
Esto permite hacer inactivo el sistema de reducción del coeficiente de rotación utilizado en un direccionado fino, antes del contacto de la palanca sobre el tope regulable.
De forma preferencial el extremo libre de la platina se encuentra en contacto con el tope fijo cuando la palanca no está apoyada sobre el tope regulable y no está en contacto con el tope fijo cuando la palanca está apoyada sobre el tope regulable.
Esto permite asegurar el desacoplamiento entre los dos movimientos (despliegue y direccionado fino) asociando de forma biunívoca un movimiento a un modo de accionamiento de este movimiento.
En otro modo de realización particular la correa arrastra la palanca por acción directa sobre...
Reivindicaciones:
1. Accionador para dispositivo de posicionamiento en rotación de un elemento móvil para equipo espacial que comprende una pieza (1) apta para ser sujetada a la parte fija de dicho equipo, un rodamiento del tipo de bolas o de rodillos, una palanca (6) destinada para accionar la parte móvil de dicho equipo y montada sobre un árbol de salida (2) soportado por un primer anillo de dicho rodamiento, comprendiendo el mencionado accionador un medio de entrada (10) móvil mecánicamente y siendo susceptible de transformar un movimiento del medio de entrada en un movimiento de rotación del árbol de salida (2) alrededor del eje de dicho rodamiento, estando el segundo anillo (3) de dicho rodamiento unido en rotación con la pieza (1), caracterizado porque un tope regulable (5) va sujetado al indicado segundo anillo (3) coopera con la palanca (6) de forma que limite angularmente la rotación relativa de los dos anillos de dicho rodamiento, y porque brazos flexibles (4) que unen el segundo anillo de dicho rodamiento y la pieza limitan el coeficiente de rotación del árbol de salida (2) en respuesta a un desplazamiento del medio de entrada (10) cuando la palanca (6) se apoya sobre el tope regulable (5).
2. Accionador según la reivindicación 1, en el cual el medio de entrada (10) es una correa que circula alrededor de una polea de reenvío (8) soportada por una platina (9) montada en extensión radial sobre el segundo anillo (3).
3. Accionador según la reivindicación 2, en el cual el extremo libre (11) de la platina (9) es retrocedida por un medio elástico contra un tope (13) fijo con relación a la estructura del equipo espacial.
4. Accionador según la reivindicación 3, en el cual el extremo libre (11) de la platina (9) se encuentra en contacto con el tope fijo (13) cuando la palanca (6) no está apoyada sobre el tope regulable (5) y no está en contacto con el tope fijo (13) cuando la palanca (6) se apoya sobre el tope regulable (5).
5. Accionador según una de las reivindicaciones 2 a 4, en el cual la correa (10) arrastra la palanca (6) por acción directa sobre el árbol de salida (2).
6. Accionador según una de las reivindicaciones 2 a 4, en el cual la correa (10) arrastra la palanca (6) por mediación de un sistema que desmultiplica la rotación de la polea de reenvío (8).
7. Accionador según la reivindicación 6, en el cual la polea de reenvío (8) es una polea doble, circulando la correa (10) por una primera polea 8A y en el cual la palanca (6) es arrastrada por mediación de una segunda correa (20) que actúa sobre el árbol de salida (2) y que circula sobre la segunda polea 8B.
8. Sistema de guiado para equipamiento espacial que comprende un accionador para dispositivo de posicionamiento en rotación de un elemento móvil según una de las reivindicaciones 1 a 7.
9. Equipo espacial que comprende un sistema de guiado según la reivindicación 8.
Patentes similares o relacionadas:
 MÁSTIL TELESCÓPICO ESPACIAL CON ENCLAVAMIENTO BAJO ESFUERZO RESIDUAL DE APRIETE, del 11 de Abril de 2011, de CENTRE NATIONAL D'ETUDES SPATIALES (C.N.E.S.): Mástil telescópico de sistema espacial que comprende: - una pluralidad de segmentos cilíndricos coaxiales imbricados radialmente unos dentro de los otros, - un […]
MÁSTIL TELESCÓPICO ESPACIAL CON ENCLAVAMIENTO BAJO ESFUERZO RESIDUAL DE APRIETE, del 11 de Abril de 2011, de CENTRE NATIONAL D'ETUDES SPATIALES (C.N.E.S.): Mástil telescópico de sistema espacial que comprende: - una pluralidad de segmentos cilíndricos coaxiales imbricados radialmente unos dentro de los otros, - un […]
 ARTICULACION AUTO-MOTORIZADA PARA CONJUNTO ARTICULADO, TAL COMO UN PANEL SOLAR DE SATELITE, del 12 de Agosto de 2010, de THALES: Articulación auto-motorizada sin rozamiento diseñada para quedar montada entre dos elementos próximos (E1, E2) que comprende dos herrajes cilíndricos impulsados en […]
ARTICULACION AUTO-MOTORIZADA PARA CONJUNTO ARTICULADO, TAL COMO UN PANEL SOLAR DE SATELITE, del 12 de Agosto de 2010, de THALES: Articulación auto-motorizada sin rozamiento diseñada para quedar montada entre dos elementos próximos (E1, E2) que comprende dos herrajes cilíndricos impulsados en […]
 SISTEMA DE DESPLIEGUE DE APENDICES ESPACIALES Y APENDICE ESPACIAL QUE COMPRENDE DICHO SISTEMA, del 20 de Abril de 2010, de THALES: Sistema de despliegue de apéndices espaciales que comprende al menos una línea de articulación de despliegue en dos fases, provista de dos ejes […]
SISTEMA DE DESPLIEGUE DE APENDICES ESPACIALES Y APENDICE ESPACIAL QUE COMPRENDE DICHO SISTEMA, del 20 de Abril de 2010, de THALES: Sistema de despliegue de apéndices espaciales que comprende al menos una línea de articulación de despliegue en dos fases, provista de dos ejes […]
 ESTRUCTURA LIGERA DESPLEGABLE Y RIGIDIZABLE DESPUES DEL DESPLIEGUE, SU PROCEDIMIENTO DE REALIZACION, Y SU APLICACION AL EQUIPAMIENTO DE UN VEHICULO ESPACIAL, del 25 de Febrero de 2010, de ASTRIUM SAS: Estructura ligera desplegable y rigidizable después del despliegue, que comprende un cordaje (1-2, 1a-2a, 13- 25-12b, 18-19, 25) constituido por lo menos por una […]
ESTRUCTURA LIGERA DESPLEGABLE Y RIGIDIZABLE DESPUES DEL DESPLIEGUE, SU PROCEDIMIENTO DE REALIZACION, Y SU APLICACION AL EQUIPAMIENTO DE UN VEHICULO ESPACIAL, del 25 de Febrero de 2010, de ASTRIUM SAS: Estructura ligera desplegable y rigidizable después del despliegue, que comprende un cordaje (1-2, 1a-2a, 13- 25-12b, 18-19, 25) constituido por lo menos por una […]
Nave espacial con mecanismo de despliegue de polímero con memoria de forma, del 15 de Julio de 2020, de RAYTHEON COMPANY: Una nave espacial que comprende: un fuselaje ; una parte desplegable que se puede desplegar a partir del fuselaje ; y […]
Sistema de iniciación de dispositivo de aeronave, del 6 de Mayo de 2020, de Ensign-Bickford Aerospace & Defense Company: Sistema de iniciación en red , que comprende: una unidad de control ; por lo menos un mecanismo de retención y liberación […]
Arquitectura de bus Cubesat, del 22 de Abril de 2020, de Université de Montpellier: Bus de nano-satélite, que comprende: - un bastidor mecánico mono-bloque que comprende múltiples postes y bordes (2, 2') que forman los lados de dicho bastidor […]
Estructura desplegable con cinta métrica, del 25 de Marzo de 2020, de THALES: Estructura desplegable que comprende: • un soporte , • una cinta métrica fijada al soporte , adecuada para […]